
形形色色的轻武器瞄准装置
2001-06-13 21:51□共田
轻兵器 2001年4期
□共 田
先进的精确瞄准装置
与三点一线的机械瞄具相比,白光瞄准镜能够较好地消除瞄准误差,瞄准的方便性也有较大提高,望远式瞄准镜还可增强射手发现目标的能力,因此可以更好地发挥轻武器的威力。但是,对于某些轻武器,特别是弹道比较弯曲的武器,白光瞄准镜仍然存在不足。
望远式白光瞄准镜中,通常是用不同的分划来瞄准不同距离上的目标的。而目标的距离一般要靠射手目测,不可能很准确,有的资料介绍目测误差大约在8%左右,有的资料认为目测误差约为20%。目测距离不准可能导致不恰当地选用瞄准分划,例如用200m的分划去瞄准300m处的目标。此外,由于瞄准镜的分划不能刻得很密(过密会影响对目标的观察),分划和目标距离可能不太相符,例如,瞄准镜只有100m、200m、300m、400m的分划,对250m处的目标瞄准时,只能用200m分划和300m分划中间的没有标志的部位去瞄准,也造成瞄准误差。
在弹道比较平直的情况下,上述误差带来的影响不大。例如用56式冲锋枪射击,对200m目标的瞄准角为4.2密位,对300m目标的瞄准角为5.8密位,两者相差1.6密位。用200m分划瞄准射击300m处的目标,瞄准点偏差约48cm。若瞄准站立的人形目标中央,且射击动作正确,命中点将在瞄准点下方,但仍在目标范围之内。因此在实际射击时,对300m以内的目标,可以用同一分划来瞄准,射手根据经验适当修正瞄准点,可获得良好的射击效果。用于近距离射击的某些准直式瞄准镜,甚至只设置一个瞄准分划。
但是在弹道比较弯曲的情况下,瞄准分划和目标距离不一致,就会带来不可忽视的误差,例如苏联AGS-1730mm榴弹发射器对200m和300m目标的瞄准角相差16密位,用200m的分划瞄准300m处的目标,瞄准点偏差约4.8m,射手就很难修正瞄准点了。
对于这一问题,加强射手目测距离的训练,或者在射击时告诉射手目标的准确距离,可以在一定程度上得到纠正,但是效果有限。近20年来,在激光测距、计算机等电子技术迅速发展的基础上,出现了可以用于轻武器的射控系统,问题才获得较好的解决。
所谓射控系统,指的是能够精确测定目标距离,能自动计算所需瞄准角(和提前角),并自动显示正确的瞄准分划的轻武器瞄准系统。目前,这一类装置的名称还比较混乱,有叫“激光瞄准具”的,有叫“带计算机的激光瞄准具”的,有叫“多功能瞄准具”的,还有的称之为“射控系统”或“火控系统”等。各公司自己取名,没有统一的标准。我国也有“火控系统”、“射控系统”、“光电瞄具”、“电子瞄具”等多种称谓。笔者暂且用“射控系统”来称呼这一类新的瞄准装置,既区别于有伺服机构、可自动调整武器射向、用于坦克和火炮的火控系统,又区别于构造比较单一的各类光学瞄准镜。
轻武器射控系统通常由白光瞄准镜、激光测距仪、弹道计算机、分划显示装置组成,有的还装有夜视器件、测角器件等。其工作原理是:射手先用激光测距仪测定目标距离,将数据输入计算机,计算机根据存储的弹道数据进行解算,算出命中目标所需的瞄准角,并据此控制瞄准分划在正确的位置上显示,射手即可用显示的分划瞄准目标射击。
对装有测角器件的射控系统,射手在测距的同时,还要测量运动目标的角速度,计算机计算出所需提前量,并控制分划在正确的位置显示,使该分划既装定了所需瞄准角,又装定了提前角。射手用它瞄准运动目标可获得较高的命中概率。
与白光瞄准镜相比,射控系统有如下优缺点:其优点一是瞄准分划与目标距离是相符的,避免了两者不一致造成的误差,大大提高了武器的命中概率;二是在瞄准装置的视场内,瞄准分划只有一个,不会在紧张的战斗中用错分划,也不会因为多分划影响对目标的观察;三是避免了目测距离、选择分划等程序,射手只需对准目标发射激光,然后用分划对准目标扣压扳机即可,瞄准过程及其训练变得简单容易。其缺点是结构复杂、价格昂贵、增加了体积和质量。
激光测距
射控系统的测距装置是激光测距仪。这是因为激光测距仪体积小、质量轻、测距误差小,可以作为轻武器射控系统的部件。那么激光测距仪是怎样工作的呢?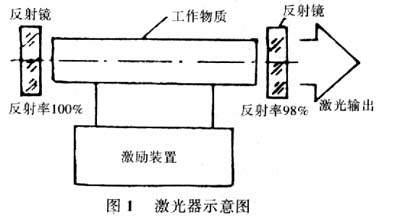
激光是原子等粒子受激辐射发出的光。图1是一种激光器的示意图。
激光器由工作物质、激励系统和光学谐振腔3个基本部分组成。激光工作物质可以是某种固体(红宝石、掺钕钇铝石榴石等)、气体(二氧化碳、氦、氖等)、半导体
(砷化镓、硫化铅等)、液体等。激励系统有外来光源、气体放电装置、化学反应装置、热源、电源甚至核反应装置等多种。谐振腔多由两块反射镜构成。反射镜有平面反射镜、球面反射镜、棱镜等形式,半导体激光器的反射镜是利用半导体单晶本身的晶面构成的。两块反射镜中一块的反射率为100%,另一块的反射率稍小(兼作输出窗)。
激光器发射激光的机理是:工作物质的粒子(原子、分子、离子、电子等)受激励装置的激励,由低能状态跃迁到高能(激发)态。处于高能态的粒子受感应产生受激辐射,放出与感应光子能量相同的光子。那些沿着与两镜垂直的轴线方向行进并且频率与谐振腔的共振频率相匹配的光,在两块反射镜之间往复反射,形成光的振荡,得到不断放大,并通过反射率较低的反射镜,沿轴线向外发射出激光。
激光具有方向性强、亮度高、单色性好的特点。因此特别适合作为光电测距仪的光源。
亮度高,使测程得到提高,而且白天也能使用;方向性强,有利于缩小光学系统的孔径,从而减小仪器的体积,减轻其质量。因此在世界上第一台激光器于1960年问世之后,第二年就研制出了激光测距仪。
激光测距仪按测定方法可分为脉冲激光测距仪和相位激光测距仪两类。军事上多采用脉冲激光测距仪。
脉冲激光测距仪的测距原理是:由激光发射器对准目标发射一个激光脉冲,然后由接收系统接收从目标反射回来的回波脉冲,通过测定激光脉冲在待测距离上的往返时间,即可求出待测目标的距离。其计算式为:
L=ct/2(1)
式中,L-待测目标的距离(m)
c-光速,等于3×108m/s
t-激光脉冲往返时间(s)
因为c很大,在轻武器的有限射程内,t必然很小。要准确测量目标距离,激光脉冲本身发射的时间(脉冲宽度)必须极短,测定激光往返时间的方法也要精密。
脉冲激光测距仪控制脉冲宽度的方法,是采用调Q技术。所谓“调Q”技术,就是改变谐振腔的结构(如用旋转棱镜、可改变折射率的电光晶体、非线性透光率的染料片等),使高能态粒子密度尽可能增加之后,突然形成光振荡,能量瞬间放出,发出脉冲宽度极窄的激光。这相当于在谐振腔内设置一个开关来控制激光的输出,可使激光脉冲的宽度减小到109s(纳秒)级。
激光往返时间的计算是用时标振荡器来完成的。激光测距仪的时标振荡器是振荡频率很高且稳定性极好的石英晶体振荡器。如振荡频率为f,即每秒产生时标脉冲f个,则一个时标脉冲的时间为1/f秒。设在激光往返时间t之内,时标振荡器产生了n个时标脉冲,则
t=n×1/f
代入t则(1)式变成
L=cn/2f(2)
(2)式中,光速c和时标振荡器的振荡频率f为已知数,只要知道在激光往返时间内时标振荡器产生的时标脉冲个数n,就能算出距离L。
脉冲激光测距仪中,n由计数器记录,在发射激光时部分激光信号打开电子门,计数器开始计数,激光回波到达时关闭电子门停止计数。算出的距离L在显示器中显示出来。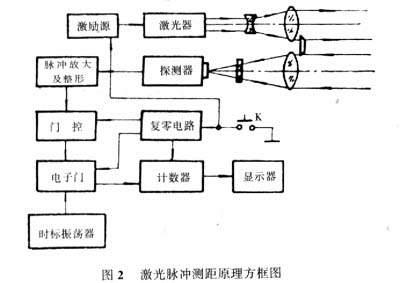
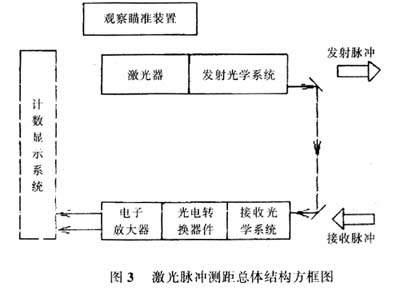
脉冲激光测距仪的原理方框如图2,总体结构方框如图3。
激光测距仪的测距误差主要取决于计数器的计数误差、激光脉冲和电脉冲引起的触发误差。在电子门从开到关这段时间内,计数器完全有可能多计或少计一个时标脉冲,从而带来测距误差。如前所述,激光脉冲的宽度很窄,为纳秒级,测距仪内电脉冲引起的触发误差得到严格控制,引起的误差均较小。
光速为3×108m/s。若时标脉冲的频率为30兆,即3×107,则一个时标脉冲的时间为1/3×10-7s,在一个时标脉冲的时间内,激光能行进10m。由于测距时激光往返一次,多计或少计一个脉冲,带来的测距误差为激光行程的一半,即±5m。这是计数器的固有误差,与测程无关。时标振荡器的频率越高,这一误差越小。军用激光距测仪的测距误差大多为±5m,有的已经达到±1m,测距精度相当高,完全可以满足轻武器射控系统的需要。
(待续)(编辑/李光亚)
猜你喜欢
数学物理学报(2022年2期)2022-04-26
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年1期)2021-03-29
测控技术(2018年12期)2018-11-25
价值工程(2017年8期)2017-03-25
卷宗(2017年1期)2017-03-17
科技视界(2016年16期)2016-06-29
贵州师范学院学报(2016年6期)2016-02-27
湖北民族大学学报(自然科学版)(2015年2期)2015-12-09
电子设计工程(2015年8期)2015-02-27
