
分布式农用机械远程在线服务平台的设计
2009-05-08 03:33陈岗
湖北农业科学 2009年2期
陈 岗
摘要:针对我国农业机械社会化服务需求不断提高的现状,设计研发了一种分布式农用机械远程在线服务平台。本文介绍了该平台设计的总体结构和设计原理及功能,重点给出了数据通信网关的设计方案,该平台通过GPS技术、GPRS技术、GIS技术和数据库技术,能够很好地实现分布式农用机械的远程在线服务。
关键词:农用机械;在线服务平台;通信网关;GPS;GPRS;GIS
中图分类号:S126文献标识码:A文章编号:0439-8114(2009)02-0465-03
随着国家对农业机械工业支持力度的不断加大,我国农业机械进入了一个高速发展的时期。农业机械产品正向着大型、高效、成套、智能化发展,预计到2010年,我国农机工业的工业总产值将达到2000亿元山。与此同时,农机社会化服务体系也取得了较快的发展,各级农机社会化服务组织迅速壮大。如何全面提升农业机械化服务水平,建立一个快速、准确、高效、科学的农机社会化服务体系是一个重要的研究课题。本文针对这一实际需求,运用先进的无线通信技术,设计实现了一种分布式农用机械远程在线服务平台。该平台实现了农用机械的导航定位、故障报修、紧急救援、信息服务、反劫防盗等多种功能,为大中型农用机械跨区跨省作业提供了技术保证。
1平台总体结构
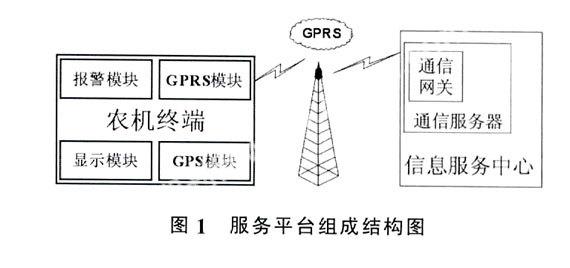
分布式农用机械远程在线服务平台按组成结构分为农机终端、无线通信网络和信息服务中心3个部分,其组成结构如图1所示。
1.1农机终端
在农用机械上加装终端单元,包括:微处理器模块、GPS模块、GPRS模块、报警模块、液晶显示模块、存储模块及电源模块组成农机终端。
微处理器模块:是农机终端的控制核心,负责控制协调农机终端内部各模块的工作、数据交换、运算及软件协议层的信息处理等工作。GPS模块:负责接收卫星导航信号,实时计算出农机终端的三维坐标、速度、方向、时间等信息并通过串口传送给主控模块。GPRS模块:用于实现农机终端和信息服务中心之间的无线数据通信。报警模块:安装有紧急报警按钮和状态传感器,用于实现农机终端的紧急及故障报警。液晶显示模块:用于显示GIS电子地图、经纬度以及信息服务中心发送来的各种信息,实现农用机械导航、综合信息发布等。存储模块:用于存放系统引导程序、μcLinux嵌入式操作系统、GIS电子地图、应用程序、用户数据等。电源模块:分别给终端各模块提供相应电源及工作时钟信号。
1.2无线通信网络
无线通信网络采用GPRS通用分组无线业务网络,它是一种采用分组交换和分组传输技术来传输高速、低速数据及信令的高效、低成本的无线数据传输方式。该技术具有“永远在线”的美称,完美地体现了GSM与INTERNE7的结合。
1.3信息服务中心
信息服务中心是整个服务平台的控制中心,由通信服务器、GIS服务器、信息服务器等组成。
通信服务器:含有通信网关,是整个服务平台实现数据通信的中枢,主要功能是实现数据的中转。GIS服务器:用于实现基于电子地图的各项功能,提供图形化的人机交互界面。信息服务器:用于存储注册的农机终端、维修网点以及农机信息等各种信息,为用户提供信息服务。
2设计原理及功能
分布式农用机械远程在线服务平台是基于GPS技术、GPRS技术、GIS技术以及数据库技术设计实现的。
2.1设计原理
在农机终端的报警模块中安装有紧急报警按钮和状态传感器,当农用机械遇到紧急情况或出现故障时,报警模块将向微处理器模块传送报警信号:GPS模块负责接收卫星导航信号,解算出自身的位置信息并通过串口传送给微处理器模块;GPRS模块负责农机终端与信息服务中心之间的双向数据传输,将农机终端的动态位置、时间、速度以及各种报警信息上传到信息服务中心。信息服务中心接收农机终端上传的位置、状态等信息,进行相应数据转换处理并存人信息服务器相应存储单元,同时在GIS服务器电子地图上进行地图匹配,实时显示农机终端的位置并且可以根据需要显示出运行轨迹,对于检测到的报警信息,将给以报警提示。信息服务中心还可通过GPRS传输网络下传相应的调度、控制指令以及发布的综合农用信息,从而实现对农用机械的定位、监控管理以及综合信息发布。
2.2实现的功能
1)监控调度:根据农机终端上传的经度和纬度坐标在电子地图上实时显示出农用机械运行的位置和运行状况,形成直观的运行轨迹。信息服务中心通过GPRS传输网络实现对农用机械的监控调度。
2)定位跟踪:信息服务中心可以对任意在线农机终端发出跟踪指令,让其按一定的时间间隔发回位置和运行状态的数据,在信息服务中心屏幕上显示其实时位置和运行状态。
3)导航功能:信息服务中心根据农用机械作业的目的地,按照最优路径快速算法得出最优路径发送到农机终端,为大中型农用机械跨区跨省作业提供技术支持。
4)点名功能:信息服务中心通过GIS监控终端发送点名指令,让在线农机终端发回一个当前位置和运行状态的数据。
5)报警受理:信息服务中心接收到农机终端上传的报警信号后,首先判别报警类型,然后根据不同的情况分别予以处理。紧急报警受理:当农用机械遇到抢劫、交通事故等紧急情况时,可按下紧急报警按钮向信息服务中心上报报警信息,信息服务中心接收到紧急报警信息后,立即将报警农机终端的信息传送给公安机关同时发送熄火锁车命令。被盗报警受理:当农机终端报警模块中的状态传感器检测到农用机械被非法侵入或非法启动运行时,将调用GPRS模块SIM卡中存储的报警号码拨打车主电话或发送短信,同时将报警信息上传信息服务中心。故障报警受理:信息服务中心接收到农机终端的故障报警后,首先在信息服务器中查询离故障农机终端最近的维修服务网点,将故障农机终端的位置、状态等信息传送给维修服务网点以便让维修人员在第一时间赶到故障现场。超速报警受理:当农用机械运行速度超出正常的设定值,信息服务中心将报警并下传报警提示信息,以提醒驾驶员注意。越界报警受理:当农用机械运行范围超出允许的设定范围,信息服务中心将报警并下传报警提示信息,以提醒驾驶员注意。
6)信息发布:信息服务中心适时向农机终端发送各类农用信息、大中型农用机械使用供求信息等,为广大农机用户提供信息服务。
3数据通信网关设计
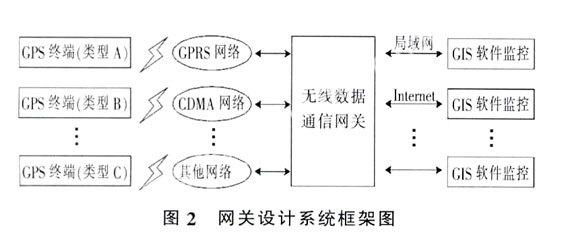
由于GPS终端在厂家和型号上的多样性,决定了GPS终端协议的异构型和多样性,这就为在线服务平台设计的标准化带来了困难。针对以上情况,提出了无线数据通信网关的方案来解决以上问题。
在网关的前端部分,实现对异构GPS终端的兼
容,在网关的出口部分实现对应用软件接口的统一,这样从一方面解决了用户已配备的GPS终端的可再利用性和可替代性,满足用户使用上的方便和投资上的合理:另一方面为应用软件开发者提供了一个统一的接口,降低了开发的复杂度,提高了开发的效率。网关设计系统框架图如图2所示。
无线数据通信网关需要完成两大功能:一是与GPS终端进行交互:二是与监控中心GIS应用软件进行交互。所以,网关结构应包括两大部分:与GPS终端交互部分:与监控中心GIS应用软件交互部分。①与GPS终端交互部分。主要包括终端数据的接收、发送和终端协议的解析、转换。这里GPS终端的多样性决定了数据接收、发送部分是软件中变动较大的部分,基于软件设计的模块化和可扩充性的考虑,数据接收和发送在程序中设计为单独的软件模块,便于未来扩充支持更多的终端。这样,在有其他型号的GPS终端设备加入的情况下,只需要按照架构设计,使用新型GPS终端协议的接收和发送部分。避免重新设计整体架构。②与中心应用软件交互部分。这部分是网关提供数据信息服务的主要部分,包括实时GPS数据信息提供、历史数据的查询以及用户管理等功能。这一部分,在定义了通用的网关协议和对用户需求充分分析的前提下,软件的功能相对独立,变动也相对较小,因此为避免GPS终端交互部分的软件变动对该部分造成影响,将这一部分设计为单独的模块。这样终端数据进行协议转换之后,不用直接与中心软件相联,而是通过这个单独的多用户转发模块相联,增强了整个系统可扩展性并便于应用。
数据通信网关选用C++言,在Microsoft Win-dows平台上使用Microsoft Visual C++6.0开发完成,编译完成的网关需运行在Microsoft WindowsServer2000或NT平台下。
网关软件结构的设计采用的是多线程工作模式。在总体设计框架中,GPS终端信息接收、发送、解析和转换全部是相对独立的过程,使用多线程可以充分发挥硬件的性能,避免部分功能模块出现延迟影响整个网关效率。使用多线程还可以提高网关的可靠性,当一个线程出现错误锁死的时候,其它的线程不受影响,仍然能够继续运行。而且通过级别较高的监控线程可以方便地检测和重新启动已经锁死的线程,提高系统长时间运行的稳定性。
4小结
预计到2020年,我国主要农作物耕种收综合机械化水平将超过70%,相应的农机社会化服务需求也会越来越高。本文从实际需求出发,设计研发了一种分布式农用机械远程在线服务平台,经实际测试表明,该平台运行稳定,为广大农机用户提供了最快捷、最便利、全方位的在线服务。随着我国农业机械化程度的不断提高,该平台必将有着更广阔的应用前景。
(责任编辑王晓芳)
