
基于隐马尔可夫Particle Filter实现突变运动智能监控研究*
2010-06-27 02:29朱敏,苏博
电信科学 2010年5期
朱 敏,苏 博
(贵州大学职业技术师范学院 贵阳 550003)
1 基于隐马尔可夫的粒子滤波原理
粒子滤波(particle filter)的主要思路是通过描述一组粒子的权值来体现后验概率,通过一定的规则来计算粒子的权重,把粒子的权重通过线性求和来获取新的位置,从而实现对目标的智能追踪。根据蒙特卡罗理论,粒子的权重与粒子所代表区域的目标直方图与目标模板直方图相似度成正比,当粒子的数目足够多,这组具有权值的粒子就能完全地描述后验概率分布,此时粒子滤波就是最优的贝叶斯估计。因此,通过一定的算法计算粒子滤波的权重,就能够对目标运动实现智能追踪。
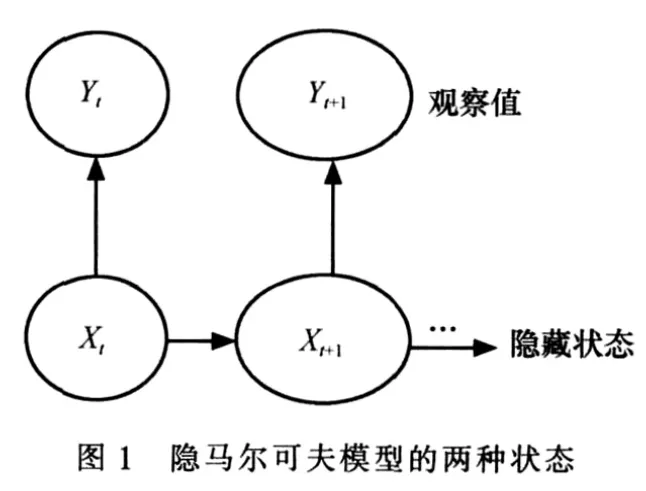
本文中笔者使用隐马尔可夫模型(HMM)来对跟踪进行预测,以图像数据为观察值,目标的位置和大小作为隐藏的状态。
给定从开始到时间t的观察值向量Yt={y1,y2,y3,…,yt},这些可见的观察值是从图像数据中提取的,Xt={x1,x2,x3,…,xt}是目标的隐藏状态如大小、位置等,如图1所示。每个粒子由状态与相应的权重(概率)组成,可表示为 ,其中i表示粒子的编号,而Nm表示粒子的数量,在每一个时刻, 表示第f个粒子所预测的目标状态,那么目标跟踪的目的在于使用贝叶斯滤波分布估计p(xt|Yt),见式(1)。

其中初始状态p(x0)表示目标初始的状态(位置和大小),本章中运动分割的结果作为 p(x0),p(xt|xt-1)表示转移模型,描述了两帧图像之间目标的移动,一个简单的办法就是通过对当前状态附近的高斯窗口进行采样得到,更好的办法则是考虑前面状态的速度和加速等信息。p(yt|xt)表示观察模型,描述了目标处于某种状态(即位于某位置和大小)的相似程度。
2 智能粒子滤波监控算法
在摄像头的视频监控中,由于观察角度的问题,目标之间发生遮挡是比较常见的现象,由于传统跟踪方法很少考虑遮挡等突变因素对目标跟踪的影响从而导致跟踪失败进而影响跟踪效果,因此如何解决遮挡目标等突变的跟踪是提高跟踪效果的重要方面。
对于静止摄像头的视频监控,当目标之间发生遮挡等突变时,这些目标重叠在一起,因此无法通过剪掉背景的方法来直接检测到这些目标,无法直接获得这些目标的状态,需要处理遮挡目标跟踪等突变的算法来解决。下文设计了两个分步的算法来实现对突变目标的智能监控。
2.1 目标先验算法
遮挡目标的先验概率分布为p(W(t)|W(t-1)),已知t-1时刻的遮挡目标W(t-1)状态预测遮挡目标在t时刻的状态W(t)。由于是t时刻所有遮挡目标的先验概率分布,且遮挡目标的先验概率分布之间是相互独立的,因此其中Bit表示 t时刻i目标的状态,Bit-1表示t-1时刻i目标的状态,n(t)表示t时刻遮挡目标的数量。由于目标用直方图表示,所以先验概率分布函数从R、G、B三个角度来预测目标的状态,所以有:

其中PR(Bit|Bit-1)表示直方图中R(红像素)的预测函数,PB(Bit|Bit-1)表示直方图中B(蓝像素)的预测函数,PG(Bit|Bit-1)表示直方图中G(绿像素)的预测函数。
2.2 利用运动历史图像处理突变运动算法
通常在跳帧的情况下,目标的运动变得突变而且不大好预测,那么结果会逐渐地远离目标真实状态的样本集而最终导致跟踪的失败。为了解决跟踪丢失的问题,本文设计了运动历史图像(motion history image,MHI)方法,它使用连续的、分层的轮廓线来代表运动而且从计算量来讲完全是实时的。这种方法可被用于视频场景中分割和测量运动,而且不局限于固定的场景。对于突变的运动来讲,其轮廓线更加突出。这些分割出的区域不是“运动斑点”,而是一些自然连接到目标移动部分的感兴趣区域。MHI主要用来描述图像中物体运动的状态,其每一个像素采用颜色深浅来表示最近变动的情形。首先,通过背景RGB的平均值来区分和标识前景和后景,然后通过膨胀和区域生长的方法来去除噪声点和提取轮廓线,最后MHI的表示按照式(2)进行更新。

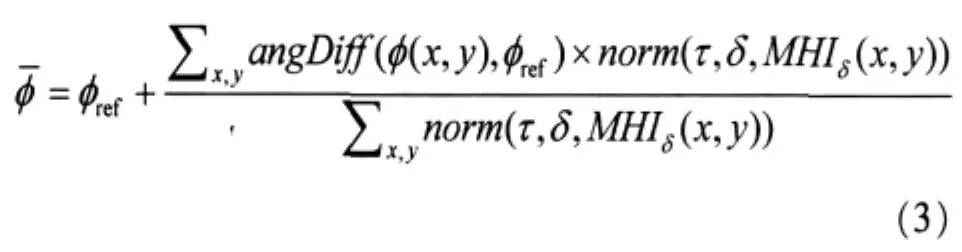
MHI的梯度(运动方向)可以通过Sobel算子在X和Y方向上产生的空间导数来有效地计算Fx(x,y)和Fy(x,y)。一个全局权重方向上的简单计算如式(3)所示:
3 程序设计
有了上文的算法作为基础,本文在考虑突变运动的影响下,使用VC++语言设计了程序的算法思路,具体如下。
Input:初始分布P(x0),描述了目标状态的初始分布以及以t+l时刻为截止的一系列图像。
Output:xt,描述了目标在时刻 t的状态。
Begin:
(1)检测:计算t+1时刻MHI梯度以及对应的方向向量
(2)预测:for i=1,…,Nm。
(5)重采样:根据粒子的权重进行重采样,保证粒子总个数N不变,采样的结果是权重大的粒子被复制成多个新粒子,权重过小的粒子被忽略,伪代码为:
int ire=0;
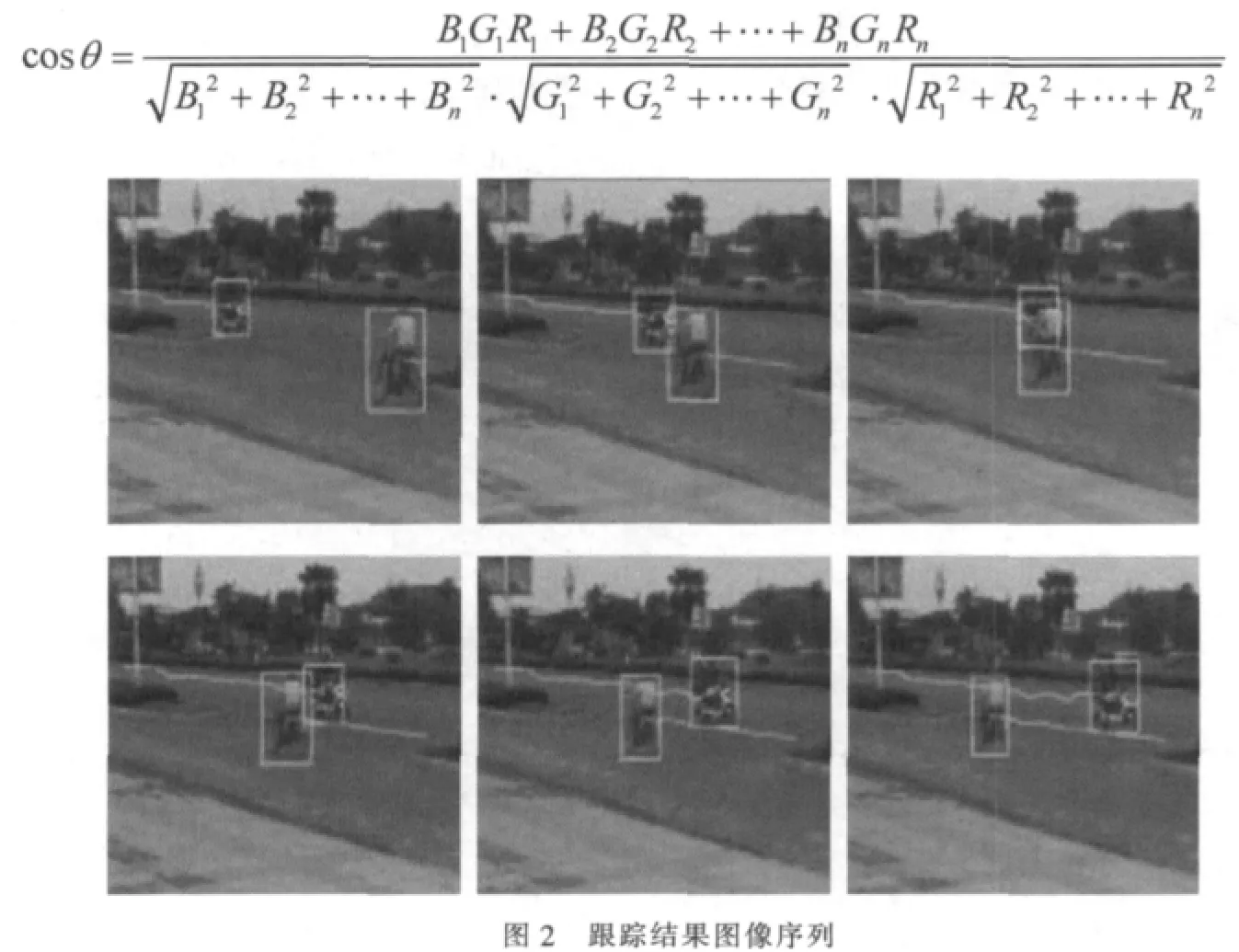
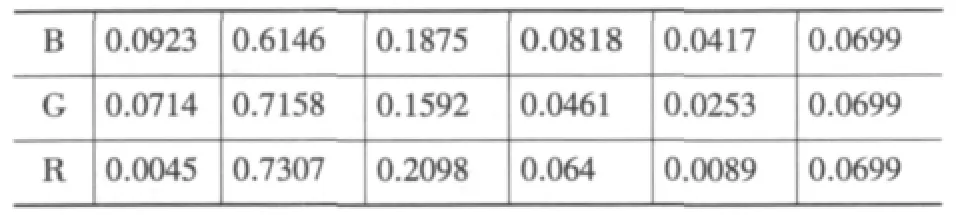
for(int j=0;j { rtmp=r+(double)(j)/(double)(N); while(rtmp>wa[ire]) 支付宝IoT事业部总经理钟繇介绍,刷脸支付产品“蜻蜓”的体积只有原来自助刷脸机具的十分之一,即插即用,也不用改造商家ERP系统。但同时,它在刷脸技术上更为先进:采用了3D结构光摄像头,更快更准;升级了智能引擎,在常去、熟悉的环境下,用户无需输入手机号码即可完成付款。 ire++ xReSample[j]=sTracking[goal].sParticle[ire].x; yReSample[j]=sTracking[goal].sParticle[ire].y, } End 在VC++平台上做跟踪试验,输入352×288大小、AVI格式的视频。结合§3的算法流程完成算法编写,对跟踪结果截图得到图像序列,抽取其中的几张图片进行效果显示。对街道上的视频用隐马尔可夫模型粒子滤波方法进行跟踪,跟踪结果的图像序列如图2所示,目标被稳定地跟踪。 该图像序列的目标模板的B、G、R归一化颜色直方图为M_hist,候选框颜色直方图Hist,如表1、2所示。 利用相似度公式: 表1 目标模板颜色直方图M_hist 表2 候选框颜色直方图Hist 将表1、表2代入相似度公式进行计算,最后算得cosθ≈9.9819,根据相似度原理,通过比较 M-hist与 Hist2的相似度即可判定追踪效果。基于本文方法优化后的粒子滤波算法在跟踪时取得了较好的效果,能部分解决背景干扰、光照变化、遮挡等突变情况下的目标追踪的难点问题。 在对于运动目标的智能视频监控中,突变智能跟踪不但是其中难解决的问题之一,而且已经成为制约视频智能监控性能的瓶颈。因此,本文重点研究智能视频监控中的智能突变跟踪,应用隐马尔可夫粒子滤波理论为目标跟踪问题进行算法分析,对突变的情况进行智能监控算法分析,然后结合算法,在VC++平台上做跟踪试验,证实在这种算法下,突变情况能够被智能监控系统稳定地跟踪。 1 梁艳春.群智能优化算法理论与应用.北京:科学出版社,2009 2 罗斯(Ross S M)(美)著,龚光鲁译.应用随机过程概率模型导论.北京:人民邮电出版社,2007 3 阿培丁(土)著,范明等译.机器学习导论.北京:机械工业出版社,2009 4 吉奥克(Giarratano J)(美)等著,印鉴等译.专家系统原理与编程.北京:机械工业出版社,2006 5 焦李成.智能SAR图像牏与解译.北京:科学出版社,2008 6 段淑敏,张涛.基于HMM的个性化智能推荐研究.平顶山学院学报,2007(5):100~103 7 林亚平,刘云中.基于最大熵的隐马尔可夫模型文本信息抽取.电子学报,2005(2):236~2404 仿真测试

5 结束语
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
摄影之友(影像视觉)(2018年12期)2019-01-28
测控技术(2018年10期)2018-11-25
浙江工业大学学报(2017年5期)2018-01-22
初中生世界·八年级(2017年3期)2017-03-24
潍坊学院学报(2016年6期)2016-04-18
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
电子设计工程(2014年20期)2014-02-27
物理与工程(2014年4期)2014-02-27
