俄货运飞船差点错过国际空间站
2010-07-13 09:02庞统
太空探索 2010年9期
□ 庞统
2010年6月30日,俄罗斯“联盟”U火箭把“进步”M-06M货运飞船送上太空,其任务是为国际空间站上的6名航天员运送近2.5吨新鲜食物、服装、设备和其他用品。这本是一次常规的航天任务,由于发生了一次意想不到的事故,引起全球航天界的广泛关注。
失之交臂
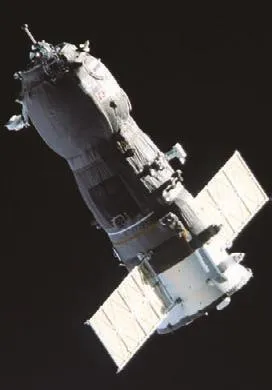
“进步”M-06M货运飞船

“联盟”U火箭
“进步”M-06M货运飞船原计划于7月2日与国际空间站“星辰”号服务舱进行对接。在飞船距离空间站2千米时,飞船与空间站之间的通信信号突然中断,并持续长达25分钟,结果造成对接失败。最终,货运飞船不得不继续其轨道飞行并飞过了空间站。准确地说,它错过了空间站。据俄罗斯电视新闻台报道,飞船与空间站对接之初一切正常,随后自动对接装置出现故障,航天员试图通过手动操作完成对接,但是没有成功。国际空间站站长——俄罗斯航天员亚历山大·斯克沃尔佐夫告诉地面飞行控制中心,货运飞船看似处于“无法控制的旋转状态”,随后从视野中消失。
对接失败后,因为该货运飞船已转换到“旋转”模式,从而无法进行手动对接。转换到“旋转”模式,是因为飞船进入了地球阴影区,“旋转”模式有助于飞船电池充电。如果电池耗尽,船载计算机将无法工作,飞船将失去控制。
由于飞船运行的轨道使其无法接受飞行控制以及来自俄罗斯地面测控站的遥测信息,所以专家们用一天时间来评估相关情况。美国航宇局官员用“罕见”来描述这次对接失败,并认为意料之外的失败与“航向”自动交会与对接系统出现故障有关;俄罗斯联邦航天局则强调,从货运飞船上传来的遥测信号分析,飞船上并未出现任何紧急情况,也并未失控;飞船与国际空间站均处于运行状态,它们之间的通信依然可靠。
美国航宇局约翰逊航天中心发言人琳恩·麦迪逊认为,对接失败事件并未置国际空间站上的6名航天员于危险境地。“国际空间站上的6名航天员有充足的储备。一旦俄罗斯方面决定再次尝试对接,我肯定,一切会好起来。”国际文传通讯社援引俄罗斯地面飞行控制中心发送给国际空间站的消息报道:“现阶段,请你们享用晚餐。对接已取消,‘进步M-06M’货运飞船还没有进入下一步运行状态。请保持联络。”
俄罗斯和美国国际空间站项目负责人在7月3日早上举行会晤,对初步定于7月4日进行的下一次对接进行评估。另外,俄罗斯能源火箭航天公司的专家会同俄罗斯飞行控制中心以及其他科研机构的人员迅速成立了一个特别调查委员会,以便尽快对此次对接失败的原因进行进一步分析。
此后,飞船在7月3日进行两次发动机点火,7月4日又进行了一次发动机点火,从而将飞船调整至适合对接的位置。
将功补过
7月4日,“进步”M-06M货运飞船与国际空间站再次实施对接任务,并顺利与国际空间站“星辰”号服务舱对接。对接由货运飞船的“航向”自动对接系统完成。在完成对接后,航天员检查了对接舱的密封性及压力数据,数小时后航天员开始从货运飞船上卸货。
俄罗斯联邦航天局第一副局长达维多夫7月4日强调说,货运飞船与国际空间站的对接完全是在自动模式下完成的。在7月2日第一次对接失败后,有关专家通过遥测技术对问题进行了彻底研究,对参加对接的所有系统进行了彻底检测,并确定了上次对接失败的原因:负责执行对接任务的两个系统中,其中一个在自动状态下工作,而另一系统则需要操作员手动操作。其原因或是通信受到干扰所致,或是由于国际空间站构件某些系统的屏蔽引起的,相关专家正在对此进行解析。
据美国航宇局称,导致第一次对接失败的原因很可能是货运飞船上“航向”自动交会与对接系统的视频转播器被激活,其信号对对接机构自身产生了干扰,导致飞船与国际空间站间正常对接指令链中断,从而触发了要求飞船中止对接的信号。“航向”自动交会与对接系统的视频转播器用于为国际空间站站长提供“星辰”号服务舱对接口的情况,以帮助其在手动模式下操作操纵杆进行对接。在第二次对接中,视频转播器未被激活,对接进行顺利。
“进步”M-06M是俄罗斯发射的第6艘新型货运飞船,该系列飞船配有运行速度更快的先进数字化控制系统,新飞船的重量比老式“进步”飞船更轻,与国际空间站的对接更加准确。

7月2日,“进步”M-06M货运飞船“错过”国际空间站,继续前行

厂房内的“联盟”U火箭和“进步”M-06M货运飞船

7月4日,“进步”M-06M货运飞船开始调姿,准备再次与国际空间站对接

国际空间站站长亚历山大·斯克沃尔佐夫通过显示器观察“进步”M-06M货运飞船与国际空间站的对接情况
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
军事文摘(2022年8期)2022-05-25
作文大王·低年级(2022年4期)2022-04-23
新世纪智能(高一语文)(2021年3期)2021-07-16
军事文摘(2020年24期)2020-02-06
军事文摘(2019年18期)2019-09-25
民用飞机设计与研究(2019年4期)2019-05-21
无人机(2018年1期)2018-07-05
无人机(2017年10期)2017-07-06
电子制作(2017年24期)2017-02-02