
PRI 变化雷达信号相位差变化率定位法研究
2010-08-10 05:23张国毅宋德亮
舰船电子对抗 2010年3期
张国毅,宋德亮,陈 枫
(空军航空大学,长春130022)
0 引 言
在信息战、电子战的环境中,使用快速高精度无源被动定位跟踪技术进行战场监视、远程精确打击已成为一种趋势。目前,国内机载侦察装备主要采用相位干涉仪测向、旋转天线测向、时差测向等测向技术,利用多点交叉定位技术进行定位。该方法定位速度慢、精度低,与国外快速定位装备相比差距较大。
基于现有装备的改进具有研制周期较短、经费开支少、性能提高较大等优点,相位干涉仪是目前普遍应用的一种测向设备,通过对相位干涉仪进行改进,可以很容易测量出相位差变化率,从而实现相位差变化率快速高精度定位。目前,国内雷达对抗装备主要采用一维相位干涉仪,因此,通过对一维相位干涉仪的改进,实现相位差变化率快速高精度定位具有重要意义。
辐射源信号特性对无源定位具有重大影响,目前相位差变化率定位法的研究大都是在假设信号的观测间隔恒定的前提下提出的。而实际的电磁辐射环境呈现越来越复杂的变化趋势,参数恒定不变的雷达信号已经越来越少,取而代之的是雷达信号各参数的复杂变化,其中,脉冲重复间隔(PRI 变化最为复杂,变化类型最多,如重频参差、PRI 抖动、PRI跳变、PRI 滑变、PRI 排定、脉组 PRI 变化、PRI 捷变、PRI 驻留等多种变化形式。当辐射源信号PRI变化时,信号的观测间隔也随之发生变化,而现有相位差变化率快速定位算法不能适应这些信号变化形式。因此如何在PRI 变化条件下精确提取相位差变化率,是必须解决的问题。本文提出采用最小二乘线性拟合法提取相位差变化率,并分析了相位差测量精度对相位差变化率精度的影响。
1 一维相位干涉仪相位差变化率定位法
本文基于相位差已解模糊进行研究,采用一维单基线相位干涉仪测量目标辐射源电磁波的相位差及其变化率信息,从中解算出目标与观测平台之间的径向距离,实现对目标的无源定位。
对于地面固定目标,当目标与载机距离较远时,可忽略地球曲率的影响,等效至二维平面。同时假定机载观测平台以一定航向角相对辐射源作非径向等高匀速直线飞行且无姿态变化。选取地面某一固定点为坐标原点O建立二维直角坐标系,设OX轴的正向为正东方向,OY轴的正向为正北方向。观测平台在此坐标系下的位置和速度可以通过导航设备获得。建立二维平面直角坐标系如图1 所示。
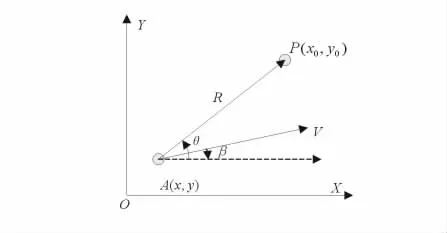
图1 观测平台与未知辐射源位置关系平面图
设OX轴正向为参考方向,其中A(x,y)代表载机所处位置,P(x0,y0)代表未知辐射源所处位置,R为载机与未知辐射源之间的径向距离,β代表载机的运动方向与参考方向间的夹角,即载机的航向角,θ代表载机与未知辐射源间的径向方向与参考方向间的夹角,即辐射源的方位角。
在载机机腹下方沿机身方向布设相位干涉仪,则飞机速度方向与入射波方向的夹角如图2 所示。
由文献[2]可知测距公式为:

式中:ft为辐射源信号频率;α为信号入射角;φ′为接收信号的相位差变化率;v为载机的飞行速度;d为相位干涉仪基线长度;c为光速。
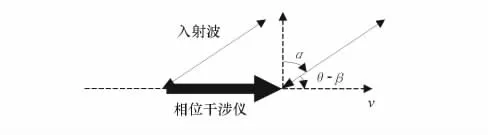
图2 飞机速度方向与入射波方向夹角关系示意图

可得:

由相位干涉仪天线电波入射角公式:
将式(3)代入式(1)可以推出:


根据式(5)即可实现对地面固定目标的快速定位。β可以通过机载导航设备获得,sinβ,cosβ即可求出。
最后可以得到:
2 相位差变化率提取方法
在相位差变化率体制下的无源定位中,相位差的误差和相位差变化率的误差决定着目标的定位精度。相位差变化率主要通过相位差序列获得,目前从相位差序列中提取的相位差变化率方法主要有差分法、卡尔曼滤波法及线性拟合法。
(1)差分法提取相位差变化率数据是一种常用、简单的方法,其原理比较直观清晰,即利用(i-1)T时刻到iT时刻这一时段内相位差的平均变化率来近似iT时刻的相位差变化率,即φ′≈(φi-φi-1)/[iT-(i-1)T]。差分方法提取相位差变化率误差较大,延长观测时间可以提高测量精度,但当时间较长时相位差有可能不是线性变化。
(2)Kalman 滤波法不仅可对信号相位差数据进行平滑滤波,尽量减小其噪声,而且可实时给出较高精度的相位差变化率估计值。选取状态变量为:

建立状态方程如下:
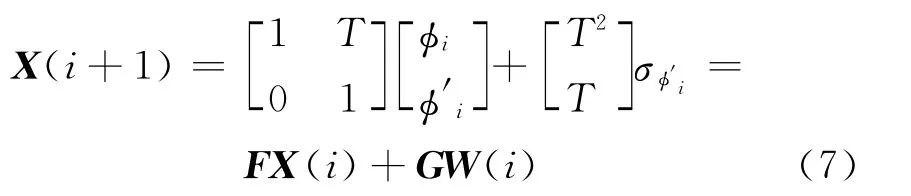
式中:W(i)=σφ′i,为观测变量相位差变化率瞬时扰动噪声;σφ′i为零均值的高斯白噪声,方差记为Q(i)。
选取观测变量为:Z(i)=φoi,观测方程为:

式中:V(i)=σφi为零均值高斯观测噪声,方差记为R(i)。
利用Kalman 滤波方法进行相位差变化率数据提取,是使用前一个时刻的状态变量估计值X(i)=(φi,φ′i)和最近时刻的相位差观测值Z(i)=φoi,应用一种递推算法来得到当前信号相位差变化率的估计值。从状态方程可知,信号观测间隔[T1,T2,…,Ti-1,Ti,…]必须严格相等。
(3)线性拟合法提取相位差变化率简单方便、计算量小。其原理是,首先对相位差序列进行线性拟合,得到相位差拟合曲线,利用iT时刻拟合曲线的斜率来近似iT时刻的相位差变化率。线性拟合法提取相位差变化率对相位差测量误差的抑制较平稳,能提取较高精度的相位差变化率。
PRI 变化信号是指脉冲的PRI 在相邻脉冲之间或脉组之间变化的信号。PRI 变化信号主要用于3 个方面:一是动目标显示中用来克服盲速,二是改善雷达的某些性能,三是反侦察与抗干扰。
理想情况下,脉冲信号重复间隔即为信号的观测间隔。当辐射源发射PRI 变化信号时,信号的观测间隔则不相等。而相位差变化率法要求观测间隔相等,下面将讨论在信号PRI 变化条件下如何利用相位差变化率快速定位法的问题。
3 相位差变化率提取方法的改进
3.1 相位差及其变化率的规律
模拟一般条件下φ(t)的真实值随时间t的变化曲线走势。设来波信号脉冲重复间隔T=0.01s,在理想情况下,观测间隔即为脉冲重复间隔,T=0.01s,来波的载波频率ft=3GHz ,高斯白噪声测频误差σft=3MHz ,航向角β=0°,观测平台的运动速度V=(300 ,0)m/s ,σv=0.1m/s ,d=3.5m,已解模糊相位差的测量精度σφ=0.261 8rad相位差变化率的瞬时扰动噪声σφ′=0.2rad/s ,固定辐射源目标的位置设为(107.15 ,399.88 )km,观测平台的运动起点为(0,0)km,假设干涉仪连续接收到500 个脉冲。仿真得到相位差随平台运动时间的变化规律如图3 所示。

图3 相位差变化规律
通过上面相位差数据的曲线走势知道,随着观测平台的匀速直线运动,接收到脉冲信号的相位差数据近似呈线性变化,所以经过解模糊后的相位差序列各数值点也应该近似依次分布于一条直线上。鉴于这一特征,不妨考虑利用直线拟合求出该拟合直线的斜率,即为相位差变化率。
实际侦察中使载机在较短时间内保持匀速直线飞行是容易实现的,因此在较短时间内可以认为相位差变化率的值为一个定值,对所测得的相位差数据根据最小二乘法拟合为一元一次函数,可表示为:

式中:斜率b即为相位差变化率的估计值φ′。
3.2 相位差变化率提取方法的改进
利用Kalman 滤波法进行相位差变化率数据提取,从状态方程可知,信号观测间隔必须严格相等。为解决观测间隔不等情况下相位差变化率提取问题,首先对非等间隔相位差测量值利用最小二乘线性拟合法求出相位差表达式(9),估计出相位差变化率。然后以观测间隔的平均值作为时间间隔,即:

根据式(9 )求出对应时刻的相位差φiT,得到等观测间隔相位差序列[φ1T,φ2T,…,φ(i-1)T,φiT,…],
其中φ(i-1)T=a+bi-1TφiT=a+biT再利用Kalman 滤波法即可估计出iT时刻的相位差变化率φ′iT(i=2 ,…,i-1 ,i,…)。下面在目标信号PRI 变化条件下,分别利用最小二乘线性拟合法、最小二乘线性拟合与Kalman 滤波联合滤波法提取相位差变化率,并对2 种方法的相位差变化率估计精度进行比较。
3.3 仿真结果及分析
仿真以三级重频参差信号为例,T=0.01s,ΔT=0.003s,其3 个PRI 分别为(T-ΔT)、T和(T+ΔT)。对于以0.01s为间隔,σφ变化范围为0.15 ~0.36rad,分别做1 000 次 Monte Carlo 运算,得到相位差变化率测量误差的标准差随相位差测量误差标准差σφ变化的关系,仿真结果如图4 所示。对于PRI 抖动信号,设PRI 中心值T=0.01s,PRI 抖动范围5%,仿真结果如图5 所示。
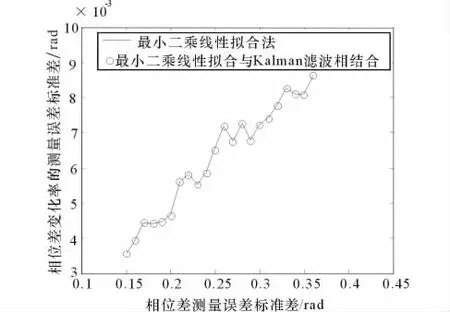
图4 重频参差信号相位差变化率精度

图5 重频抖动信号相位差变化率精度
由图4 和图5 可以看出,当相位差的测量误差增大时,相位差变化率的测量误差也会随之增大,所以要想得到高精度的相位差变化率,就必须提高相位差的测量精度。
还可以看出,对于重频参差信号和重频抖动信号,最小二乘线性拟合法、最小二乘线性拟合与Kalman 滤波的联合滤波法都能够达到较高的相位差变化率估计精度,两种方法的估计精度几乎相同。对于其他形式的PRI 变化信号也可以得到同样结论。为简便起见,可以采用最小二乘线性拟合法提取相位差变化率。
图6 和图7 分别给出了在重频参差信号和重频抖动信号条件下,利用最小二乘线性拟合法提取相位差变化率,然后再利用相位差变化率算法进行辐射源位置估计的仿真结果,图中给出了辐射源位置坐标(x,y)的估计精度。仿真条件同前所述。
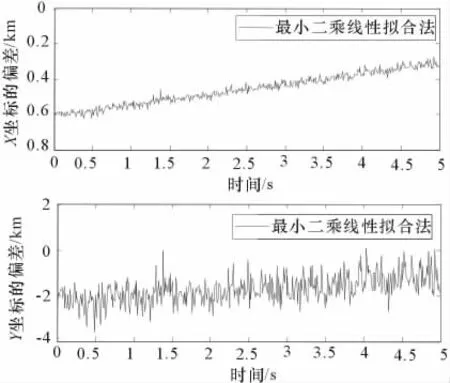
图6 重频参差信号辐射源位置误差
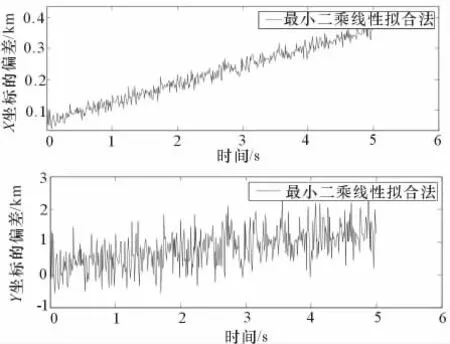
图7 PRI 抖动信号辐射源位置误差
由图6 、图7 可看出,在上述仿真条件下,当雷达信号为重频参差或重频抖动信号时,利用最小二乘直线拟合法提取相位差变化率,可在5s达到相对定位误差0.3%;当为PRI 排定信号时,可在5s达到相对定位误差0.6%。对其它PRI 变化形式的信号,其仿真结果表明,以上结论同样成立。
4 结论
文中首先分析了机载单站一维相位干涉仪条件下相位差变化率定位法的基本原理。针对PRI 变化雷达信号的相位差变化率提取问题,提出采用最小二乘线性拟合法进行提取相位差变化率的方法,并分析了相位差误差对相位差变化率估计精度的影响。
仿真结果表明该方法能在各种PRI 变化信号条件下达到较高的相位差变化率估计精度和定位精度,具有良好的适应性和实用性,对实际装备的改进和提高装备快速高精度定位能力具有重要意义。
[1]赵国伟.高精度机载单站无源定位技术研究[D].西安:西北工业大学,2007.
[2]李炳荣,曲长文,王欣欣.机载快速无源定位原理及误差分析[J].弹箭与制导学报,2005 ,25(4):291-293.
[3]朱伟强,黄培康,马琴.基于相位差变化率测量的单站定位 方 法 [J].系 统 工 程 与 电 子 技 术,2008 ,30 (11 ):2108-2111.
[4]Frank Rehm,Frank Klawonn,Rudolf Kruse.A novel approach to noise clustering for outlier detection [J].Soft Compution,2007(11):489-494.
[5]王万平,李强,廖胜.固定目标的运动单站被动测距[J].红外与激光工程,2008 ,37(1):185-188.
[6]Wang Jun-hua ,Wang Yong-sheng,Guo Tao,et al.Rate of phase difference change estimation in single airborne passive locating system[J].Chinese Journal of Aeronautics ,2009(22):184-190.
[7]Krutchinskii S G.Nonstandard hardware for adaptive controllers and passive location systems [J].Automation and Remote Control ,2001 ,62(7):1146-1154.
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
湖南电力(2021年4期)2021-11-05
北京航空航天大学学报(2020年10期)2020-11-14
初中生世界·九年级(2020年9期)2020-09-21
航天电子对抗(2019年4期)2019-06-02
雷达学报(2018年5期)2018-12-05
航天返回与遥感(2018年3期)2018-08-10
雷达学报(2018年3期)2018-07-18
制导与引信(2017年3期)2017-11-02
雷达学报(2017年1期)2017-05-17
