基于SOC的卫星姿轨控系统通用电模拟器设计
2010-11-26 10:50胡迪董云峰
中国空间科学技术 2010年2期
胡迪 董云峰
(北京航空航天大学,北京100191)
1 引言
在卫星地面电联系统中,对于测量系统和执行系统,通常按照各真实设备的电接口规范和功能要求由各种电路板来模拟,该电路板被称为各设备的电模拟器[1]。地面电联试阶段采用电模拟器可降低成本、缩短开发周期、能有效提升卫星功能测试以及方便电模拟器的升级改造;可方便地模拟各部件工作状态以满足测试要求和验证的需要;还可以在电模拟器程序中加入故障模式,方便地进行故障仿真,提升卫星控制系统的可靠性和冗余性。而目前大部分研究着重于如何构建卫星仿真平台、测试网络及星载计算机的总线化设计[2-5],对于地面电联试如何构建通用型电模拟器关注较少。文献[1]提出采用PXI总线构建通用卫星电模拟器平台是基于标准总线的电模拟器,适合数字式仿真,不适合电信号故障模式下的仿真应用。文献[6]采用CAN总线和以太网构建卫星和火箭控制系统地面测试平台,电模拟器采用各种板卡实现,并未实现通用化设计。文献[7]只针对反作用飞轮提出了基于C8051F040的电模拟器设计,此模拟器设计针对性太强,核心芯片处理能力有限,不适合进行复杂的精确的模型计算和故障模式注入仿真。文献[8]提出采用 TM320F2812和C8051F040构建电模拟器,对于各模拟非标准接口并未进行详细说明,不能仿真各种电信号的故障模式。文献[1]、[8]均不能直接用于采用PCM码构成串行移位接口的仿真应用。
本文采用基于ARM7内核的片上系统(SystemonaChip,SOC)微控制器设计通用型电模拟器,芯片处理能力强大适合精确复杂模型计算,接口丰富覆盖了各部件接口特性,适合电信号仿真;并且所有部件模拟器采用相同的硬件设计,只需修改配置表即可完成对不同模拟器的配置。分系统闭环测试表明该通用型电模拟器采用统一化硬件设计,提高了系统的可靠性,减少了开发成本,增加了系统的可扩展性,提升了可维修性,对其他卫星的地面电联试有较高的参考价值。
2 通用电模拟器硬件设计
2.1 硬件接口分析及方案设计
在该型卫星技术改进电联式系统研制过程中,姿态轨道控制分系统的电联系统是其核心组成部分。针对该型卫星姿态轨道控制分系统的接口特性,将分系统电模拟器分为:星载计算机模拟器、通用接口箱模拟器、敏感器模拟器、执行机构模拟器,与动力学仿真系统和遥测遥控系统构成闭环电联试系统。星载计算机模拟器通过CAN总线控制通用接口箱采集敏感器数据和控制执行机构动作,通用接口箱采用与真实部件一致的接口与敏感器模拟器、执行机构模拟器相连,敏感器模拟器与执行机构模拟器采用CAN总线与动力学计算机进行数据交换,遥测遥控分系统通过串行移位接口与通用接口箱相连,采集星载计算机模拟器的遥测数据和对部件模拟器进行遥控操作。
根据接口定义(IDS)表,星载计算机接口分别与敏感器、执行机构、检测和遥测遥控接口对应,其中敏感器由速率陀螺、二浮陀螺、太阳敏感器、地球敏感器组成,执行机构由推力器、磁力矩器、反作用轮组成。整个系统组成信号达两百多条,如果按一对一进行电模拟器设计,将带来极高的设计成本。设计通用型电模拟器可有效解决接口众多,信号差异大的缺点,并且可有效降低设计成本,增加系统可靠性。
经过分析统计,该型卫星信号种类可分为如下几大类:0/12V数字量输入输出、0/5V数字量输入输出、0/12V开关量输出、0/7V脉冲量输入输出、0/12V脉冲量输入输出、-10~+10V模拟量输入输出、0~+5V模拟量输入输出、RS422接口、SPI接口、AD/DA接口、串行移位接口等。根据信号类型统计,通用型电模拟器信号类型覆盖全面,不仅能通过相同的硬件配置成不同的敏感器模拟器和执行机构模拟器,而且对星载计算机接口进行配置形成通用接口箱,对星载计算机进行接口分离。
总体方案设计采用集成度较高的SOC设计,组成结构如图1所示。
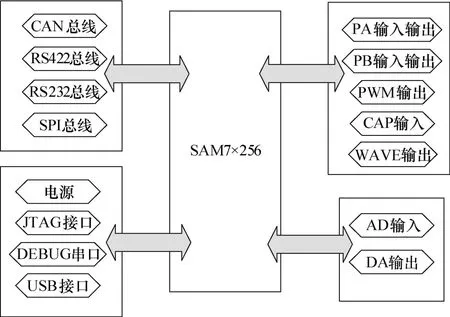
图1 组成结构图
2.2 硬件通用设计
本文中SOC芯片选择Atmel公司生产的AT91SAM7X256,片上集成256kbyte的Flash和64kbyte的SRAM,集成2个串口和一个调试串口,集成CAN总线控制器,可用IO口线达64条,其IO口线可通过软件配置进行不同功能使用。具体实现方式如下。
输入输出接口:基本的输入输出接口、要求输入与输出兼容12V电平,其中输入输出接口采用7X256自带的通用并行IO,通过跳线选择输入或输出方式,并经过ULN2803作电压调理,通过改变其上拉电压可使其兼容+12V、+5V、+3.3V的电平。为了满足大电流输出的要求,PB口采用两个三极管组成的射极跟随电路用以驱动开关量控制继电器。
PWM信号:PWM信号采用单片机内部的4路16位PWM信号发生器产生,经ULN2803调理后输出0~12V的电压。
脉冲捕获输入和波形输出:脉冲捕获输入和波形输出采用单片机内部的2个16位定时器计数器,每个可以有两个捕获输入或波形输出引脚(TIOA、TIOB)。经ULN2803电压调理后输出0~12V电压。
模拟量输入输出:模拟量输入采用AD公司的积分型模数转换芯片AD7708,它具有8路16位的输入通道,控制总线采用SPI接口;模拟量输出采用AD公司的4通道16位的芯片AD5564,SPI接口的控制总线,经过测试精度符合设计要求。
总线接口:由于SAM7X256片上集成一个CAN总线接口,两个USART串行口,通过配置不同的收发芯片即可实现CAN总线、RS422总线和 RS232总线,同时将DEBUG串口和 USB、JTAG口引出便于调试。
采用AT91SAM7X256核心芯片,其片上集成接口众多,电路设计简单,工作频率为48MHz,能适应各种复杂模型计算和故障模式仿真。接口覆盖不同种类信号,可有效进行不同电模拟器的配置,电路板选择标准的4U尺寸规格,电路板大小为220mm×145mm。
3 通用电模拟器的不同配置
3.1 硬件可配置性
采用通用电模拟器平台可方便地实现对不同部件进行配置,本文针对陀螺和反作用轮的接口特性及数据流向给出基于通用电模拟器的硬件配置说明。
陀螺模拟器的配置:星载计算机模拟器通过开关量控制陀螺部件模拟器的继电器打开或关闭陀螺模拟器,陀螺模拟器将电源状态通过电平信号反馈给星载计算机模拟器,陀螺部件模拟器通过CAN总线从动力学与环境计算机获取角速度信息,从而将角速度转成角度脉冲和模拟量输出给星载计算机模拟器;从数据流向分析可以看出,可从通用电模拟器将CAN总线接口、数字量输出接口、开关量输入接口、脉冲信号输出接口和模拟量输出接口提取出即可配置成陀螺电模拟器。
反作用轮模拟器的配置:星载计算机模拟器通过开关量控制反作用轮模拟器的继电器打开或关闭反作用轮,反作用轮模拟器将电源状态通过电平信号反馈给星载计算机模拟器,星载计算机计算出指令电压通过DA输出给反作用轮模拟器,反作用轮模拟器计算出力矩通过CAN总线传送给动力学与环境计算机,同时反作用轮输出转速脉冲及速度方向给星载计算机模拟器;从数据流向分析可以得出,可从通用电模拟器将CAN总线接口、数字量输出接口、开关量输入接口以及脉冲信号输出接口和模拟量输入接口即可配置成反作用轮电模拟器。
星载计算机模拟器由于接口众多,采用通用接口箱将星载计算机模拟器应用层软件与接口分开,针对陀螺电模拟器和反用轮电模拟器,可从通用电模拟器将CAN总线接口、数字量输入接口、脉冲量捕获接口、模拟量输入输出接口以及开关量输出接口即可实现接口模块的配置,如图2所示采用通用硬件平台,配置成3+1SX轴陀螺电模拟器和反作用轮A的电模拟器,以及配置成通用接口箱的接口模块,用于采集陀螺模拟器输出的数据和控制反作用轮模拟器。
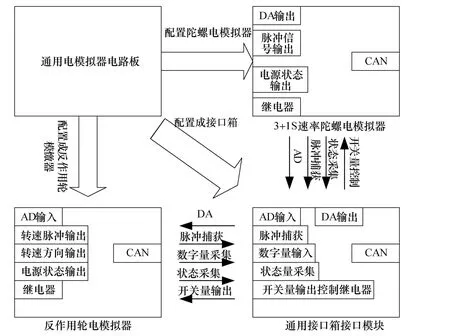
图2 通用电模拟器的不同配置
3.2 软件的可配置性
通用电模拟器软件的设计根据需求分成驱动层、配置层和应用层,驱动层负责实现对端口的操作,同时向应用层提供统一的驱动接口函数;配置层负责实现不同的电模拟器;应用层负责实现各模拟器的原理模型、误差模型和失效模型,这些模型可以先在Windows平台下调试通过,本文在此不做分析。
配置层分两部分,一部分负责提取该电模拟器所需驱动函数,称为设备配置,采用预编译方式实现,通过定义不同的宏定义实现不同驱动函数的编译;另一部分负责配置具体操作端口称为端口配置层,端口配置层根据上一节的硬件配置实现;通过应用层的调用关系即可实现所需电模拟器功能配置。
如陀螺电模拟器需要CAN总线,产生电平信号和脉冲信号以及模拟量信号,设备配置层从驱动层提取出CAN总线驱动、端口操作驱动、脉冲信号产生驱动以及模拟量ADDA驱动,端口配置层负责将陀螺电模拟器所需端口配置到具体的端口上。
4 通用电模拟器的特点
该通用电模拟器具有下列特点:
1)硬件平台统一化,所有电模拟器采用相同硬件平台,电路完全统一,因此电路调试简单,可随时更改配置。由于硬件平台采用统一配置,因此软件驱动只需编写测试一次即可,节约时间,同时通过裁剪软件即可实现不同模拟器的使用。
2)可扩展性好,硬件平台覆盖所有部件的信号特征,如果新加入部件,只需根据新加部件进行硬件配置即可实现新加部件的仿真测试,加快了算法及模型的验证周期。
3)可维修性好,采用通用化硬件和软件平台,出现故障即可及时进行对比分析或更换硬件板子。
4)可使仿真人员更加专注于模型及算法的开发,可快速验证算法的有效性,同时也可以通过故障注入等方式进行故障仿真,提高算法的可靠性。
5 通用电模拟器闭环测试
采用该通用电模拟器完成某型卫星的通用接口箱配置及敏感器模拟器配置和执行机构模拟器配置,接入地面电联试仿真系统,从星箭分离后开始仿真,星载计算机控制周期设置为64ms,动力学与环境计算仿真步长为4ms,整个控制系统采用通用电模拟器共配置了速率陀螺电模拟器、二浮陀螺电模拟器、地球敏感器电模拟器、太阳敏感器电模拟器、反作用轮电模拟器和推力器电模拟器,在不同的模式下采用不同的姿态控制方案,通过仿真达到了控制要求。
太阳捕获模式下采用推力器和速率陀螺姿态确定及控制方案,配置推力器和3+1S速率陀螺电模拟器和接口箱模块。从速率阻尼模式开始,经过太阳搜索、对日调整姿态到对日巡航结束,仿真初始参数为:滚动角为10°,俯仰角为10°,偏航角为-50°,X轴角速度为1.5(°)/s,Y轴角速度为-2.1(°)/s,Z轴角速度为2(°)/s。图3为太阳捕获模式下3个姿态角与角速度的变化情况,可看到3个姿态角速度均趋向于0,符合设计要求。

图3 太阳捕获模式下的姿态角与角速度变化
地球捕获模式采用地球敏感器、太阳敏感器、速率陀螺和推力器的姿态确定和控制方案。从太阳捕获模式转入地球捕获模式,加入地球敏感器电模拟器以及接口箱模块,依次进行地球搜索、两轴对地、三轴对地到地球指向结束。仿真初始参数设定为:滚动角为10°,俯仰角为10°,偏航角为-50°,X轴角速度为1.5(°)/s,Y轴角速度为-2.1(°)/s,Z轴角速度为 2(°)/s。图4是地球捕获模式下角度与角速度的变化,3个姿态角最终变化趋向于0,3个姿态角速度也在控制要求范围内。
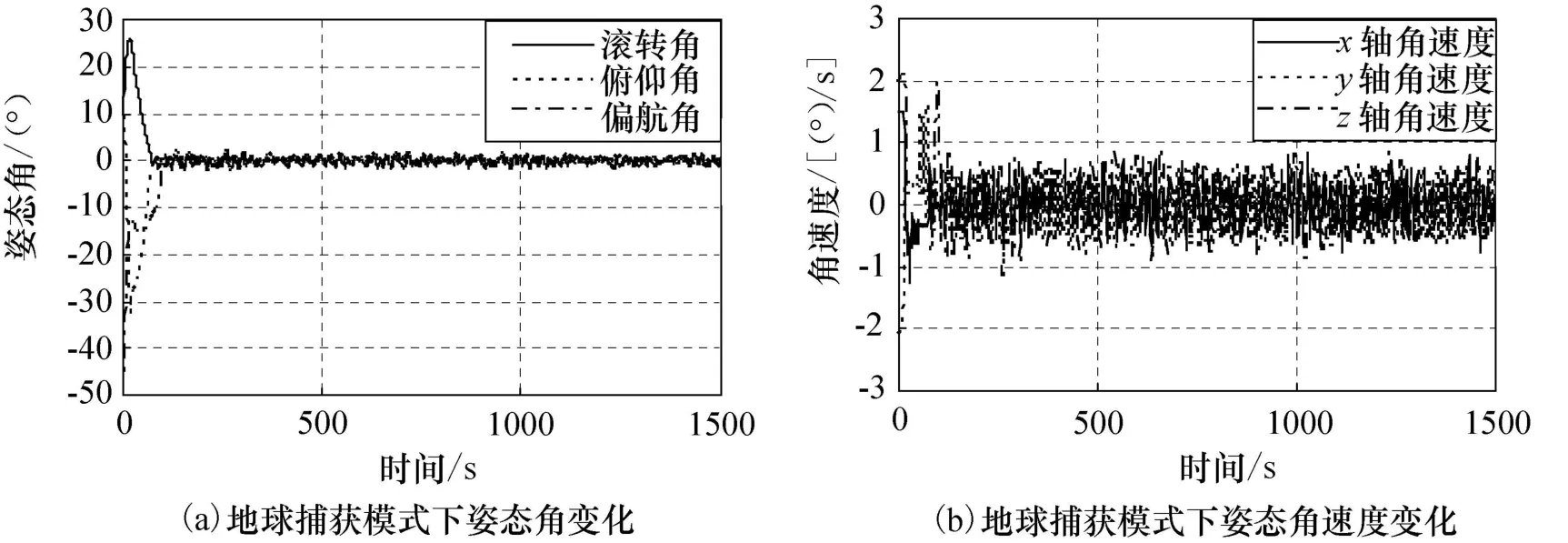
图4 地球捕获模式下的姿态角与角速度变化
正常模式采用二浮陀螺、太阳敏感器和地球敏感器及反作用轮姿态确定和控制方案,在完成三轴对地定向后转入,加入二浮陀螺电模拟器和反作用轮电模拟器及接口箱模块,采用反作用轮进行姿态控制,仿真初始参数设定为:滚动角为0.5°,俯仰角为-0.6°,偏航角为0.3°,X轴角速度为0.1(°)/s,Y轴角速度为-0.1(°)/s,Z轴角速度为0.1(°)/s。图5是正常模式下的控制效果,3个姿态角和角速度均达到了控制要求。
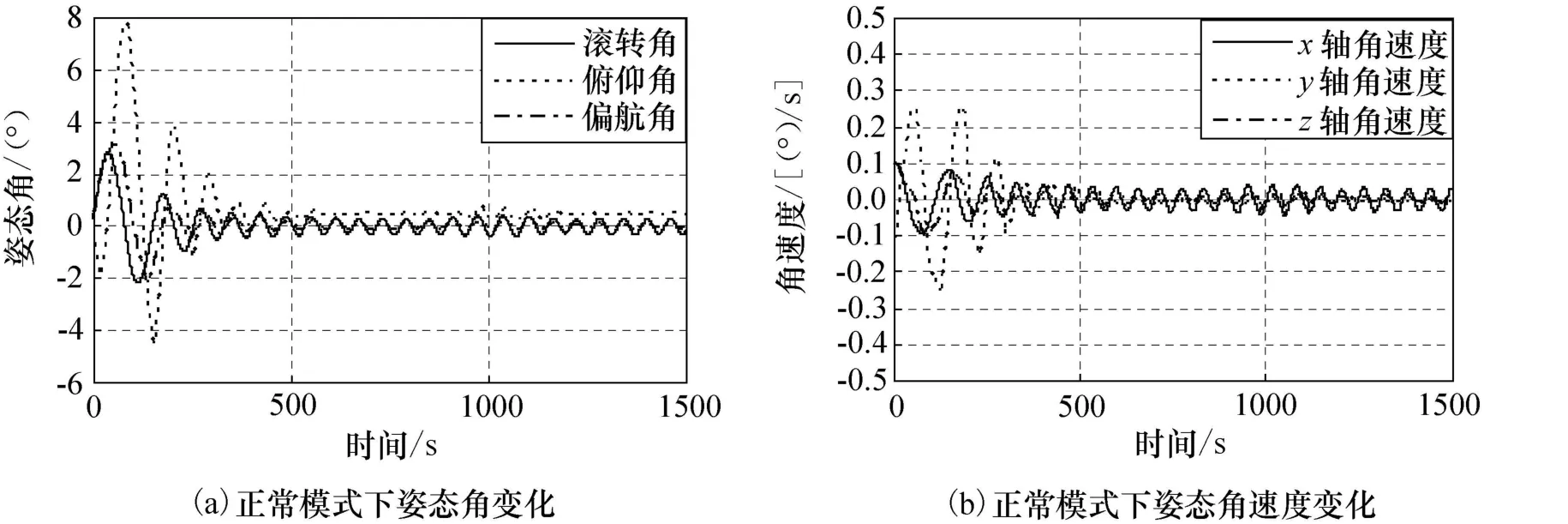
图5 正常模式下的姿态角与角速度变化
6 结束语
通过对某型卫星姿态轨道控制系统的电联系所需接口进行信号统计分析,采用SOC芯片将电模拟器进行通用化设计,不仅降低了开发成本,而且缩短了开发周期。并通过不同配置将通用型电模拟器配置成姿轨控制系统所需的模拟设备,接入闭环仿真测试系统,进行了太阳捕获、地球捕获和正常三种模式的闭环测试,与单机全数字仿真结果进行了比较,采用该设计方法对控制精度没有影响,达到了设计要求。基于该电模拟器的通用化设计,可广泛应用于不同卫星平台的电联试电模拟器设计当中,对地面卫星电联试应用具有很好的参考价值。
[1]孙亚非,梁斌,李成,等.基于卫星通用电模拟器开发平台的目标测量系统电模拟器研制[J].宇航学报,2008,29(2):705-709.
[2]兰盛昌,赵丹,徐国栋.星载电子系统数字化设计仿真平台[J].系统仿真学报,2008,20(2):314-317.
[3]吴文昭,李想,陈琪锋,等.分布式卫星系统仿真平台研究现状与技术分析[J].航天控制,2007,25(4):57-62.
[4]VINCENTDUBOURG,JEANLOUISCARAVON,PASCALEDANTO,etal.AnInnovativeOnboardComputerForCNESMicrosatellites[C].DigitalAvionicsSystemsConference2002ProceedingsThe21st,IEEE:2002,9B2-1-9B2-11vol.2.
[5]WUXIAOFENG,TANYAVLADIMIROVA.Hardware-in-LoopSimulationofaSatelliteSensorNetworkfor DistributedSpaceApplications[C].NASA/ESA ConferenceonApaptiveHardwareandSystem.2008:424-431.
[6]杨希祥,张为华,肖凯.基于CAN总线的控制系统地面仿真测试平台研究[J].中国空间科学技术,2009,29(2):38-45.
[7]李冬柏.反作用飞轮电模拟器设计与应用[D].哈尔滨:哈尔滨工业大学,2006.
[8]孙亚非,梁斌,李成,等.基于TM320F2812和C8051F040的目标测量系统电模拟器研制[J].电子测量技术,2008,31(4):142-145.
猜你喜欢
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
小哥白尼(趣味科学)(2021年6期)2021-11-02
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
锻压装备与制造技术(2020年2期)2020-05-12
中学课程辅导·教师通讯(2018年10期)2018-09-04
中学生数理化·高一版(2017年3期)2017-07-08
电子制作(2016年21期)2016-05-17
火控雷达技术(2016年1期)2016-02-06
装备环境工程(2015年5期)2015-02-28