
NW型直齿行星传动的动力学建模与固有特性分析
2011-06-05 15:30宋轶民
天津大学学报(自然科学与工程技术版) 2011年8期
张 俊,宋轶民
(1. 天津大学机械工程学院,天津 300072;2. 安徽工业大学机械工程学院,马鞍山 243002)
NW型直齿行星传动的动力学建模与固有特性分析
张 俊1,2,宋轶民1
(1. 天津大学机械工程学院,天津 300072;2. 安徽工业大学机械工程学院,马鞍山 243002)
为揭示NW型直齿行星传动的固有特性,在系杆随动参考坐标系下建立该类传动系统的平移-扭转耦合动力学模型.通过分析各构件间的相对位移关系,推导出系统的运动微分方程,进而通过求解其特征值问题获知系统的固有频率和相应振型.固有特性分析表明,NW型行星传动有3种典型振动模式,即扭转振动模式、平移振动模式和行星轮振动模式.其中,行星轮振动模式又可细分为行星轮同振、左振、右振3种子模式,此点与NGW型行星传动颇为不同.NW型行星传动的振动模式与构件支承刚度间存在一定映射关系.其中,中心构件的支承刚度仅影响中心构件相应方向上的振动模式,而与行星轮振动模式无关;行星轮支承刚度对系统3种振动模式均有影响.
直齿行星传动;动力学建模;固有特性;固有频率;振动模式
NW型行星传动是一种较为普遍的齿轮传动类型.与同属2K-H类的NGW型行星传动相比,NW型传动具有结构紧凑、传动比大和承载能力高等优点,故常用于NGW型不适用的径向尺寸受限、传动比较大的场合[1].
尽管学术界已针对NGW型行星传动动力学问题进行了广泛研究,其内容涉及自由振动分析、动态响应和振动抑制等多个方面[2-11].相比之下,针对NW型行星传动动力学的研究很少,只有文献[12]对NW型直齿行星传动的动力学问题进行了初步探讨,但该文将双联行星轮处理为单个刚性齿轮进而按照NGW型行星传动进行建模的做法尚待完善.由于双联行星轮结构的引入,NW型行星传动的动力学特性必然与NGW型传动有所不同.为明晰该类传动的动态特性,以NW型直齿行星传动为研究对象,在计入构件支承刚度、齿轮副时变啮合刚度、陀螺效应等诸多影响因素的基础上,采用集中参数法在系杆随动参考坐标系下建立系统的平移-扭转耦合动力学模型.以此为基础,通过求解系统动力学方程的特征值问题,可揭示出NW型直齿行星传动的固有特性.
1 动力学建模
图1所示为NW型行星传动示意.图中,s、c、r、pn、pn′分别代表轮系中的太阳轮、系杆、内齿圈、双联行星轮1和双联行星轮2.
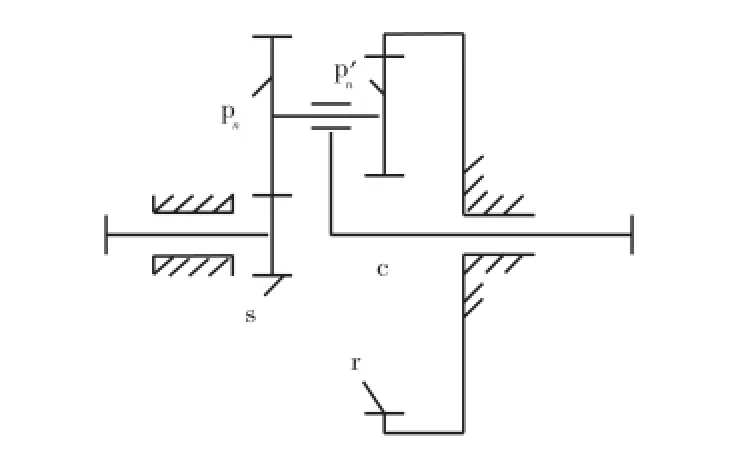
图1 NW型行星传动示意Fig.1 Scheme of NW planetary gear unit
1.1 平移-扭转耦合模型
采用与文献[11]类似的方法,可在系杆随动坐标系下建立NW型直齿行星传动的平移-扭转耦合动力学模型,其模型如图2所示.各符号的含义如下:kpn为行星轮支承刚度(n=1,2,…,N);ψn为第n个行星轮中心与坐标原点的连线与x轴正向的夹角,ψn=2π(n-1)/N;kij为中心构件的支承刚度(i=c,r,s; j=x,y,u);(xi,yi,ui)为构件位移(i=c,r,s,1,2,…,N);ui、θi分别为各构件的扭转线位移与扭转角位移,ui=riθi;ri为各构件的回转半径(若i=c,则为行星轮轴心到系杆几何形心的距离;若i=r,s,1,2,…,N,则为各齿轮的基圆半径).
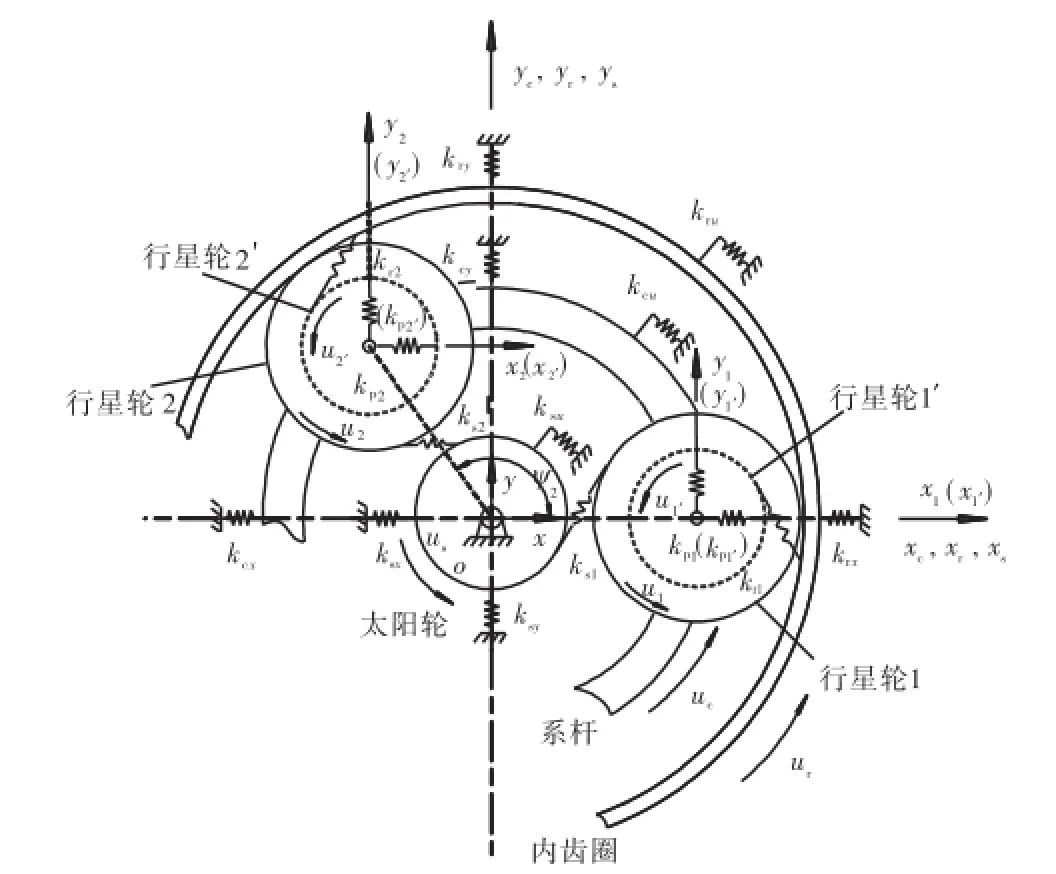
图2 NW型行星传动平移-扭转耦合动力学模型Fig.2 Translational-rotational-coupling dynamic model of NW planetary gear unit
1.2 构件相对位移分析
NW型直齿行星传动中各构件间的相对位移关系如图3所示.
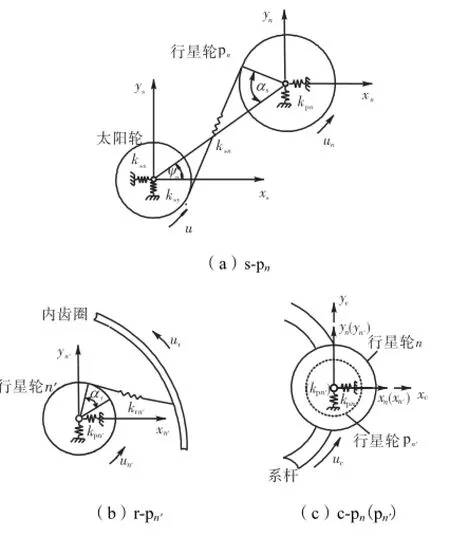
图3 行星轮系各构件间相对位移关系Fig.3 Displacement relationships between different parts of planetary gear unit
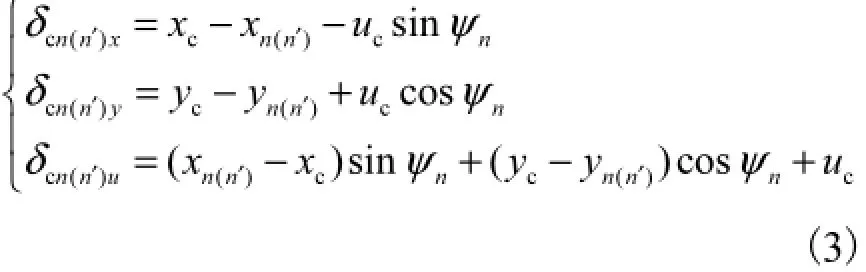
图3中,sα、rα分别为太阳轮与行星轮以及行星轮与内齿圈间的啮合角.将各构件之间的相对位移向啮合线方向投影,并设定受压方向为正方向,可得太阳轮与行星轮pn相对位移沿啮合线方向投影

内齿圈与行星轮pn′相对位移沿啮合线方向投影


1.3 系统运动方程
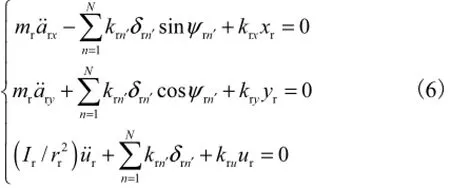
设定NW型直齿行星传动的内齿圈固定,太阳轮、系杆分别连接输入端与输出端,且输入、输出扭矩分别为sT、cT.假定系杆、内齿圈、太阳轮和2个行星轮的质量分别为cm、rm、sm、nm和nm′,其转动惯量分别为cI、rI、sI、nI和nI′.分析系统中各构件的受力状况,依据牛顿第二运动定律可建立如下的运动方程.
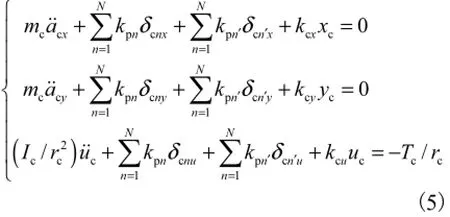
1) 系杆运动方程2) 内齿圈运动方程
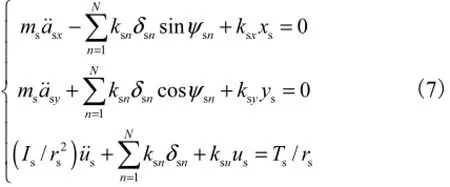
3) 太阳轮运动方程
4) 行星轮pn运动方程
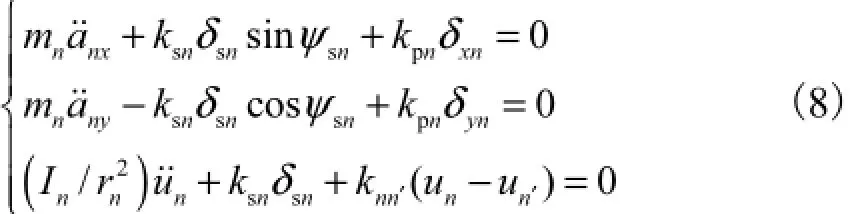
5) 行星轮pn′运动方程
整理式(5)~式(9),并写成矩阵形式
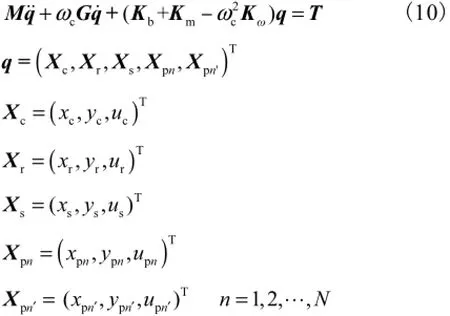
式中q为系统的广义坐标列阵.其余各符号含义参见文献[11].
2 固有特性分析
考虑到一般情况下NW型行星传动的系杆角速度较小,科氏力、离心力均可忽略,则式(10)可以简化为

对式(11)求解特征值问题,可得系统的各阶固有频率和振型.
不失一般性,不妨以表1所示的NW型直齿行星传动为例,采用上述动力学模型求解系统的固有频率和相应振型.

表1 NW型直齿行星齿轮传动的基本参数Tab.1 Parameters of NW spur planetary gear unit
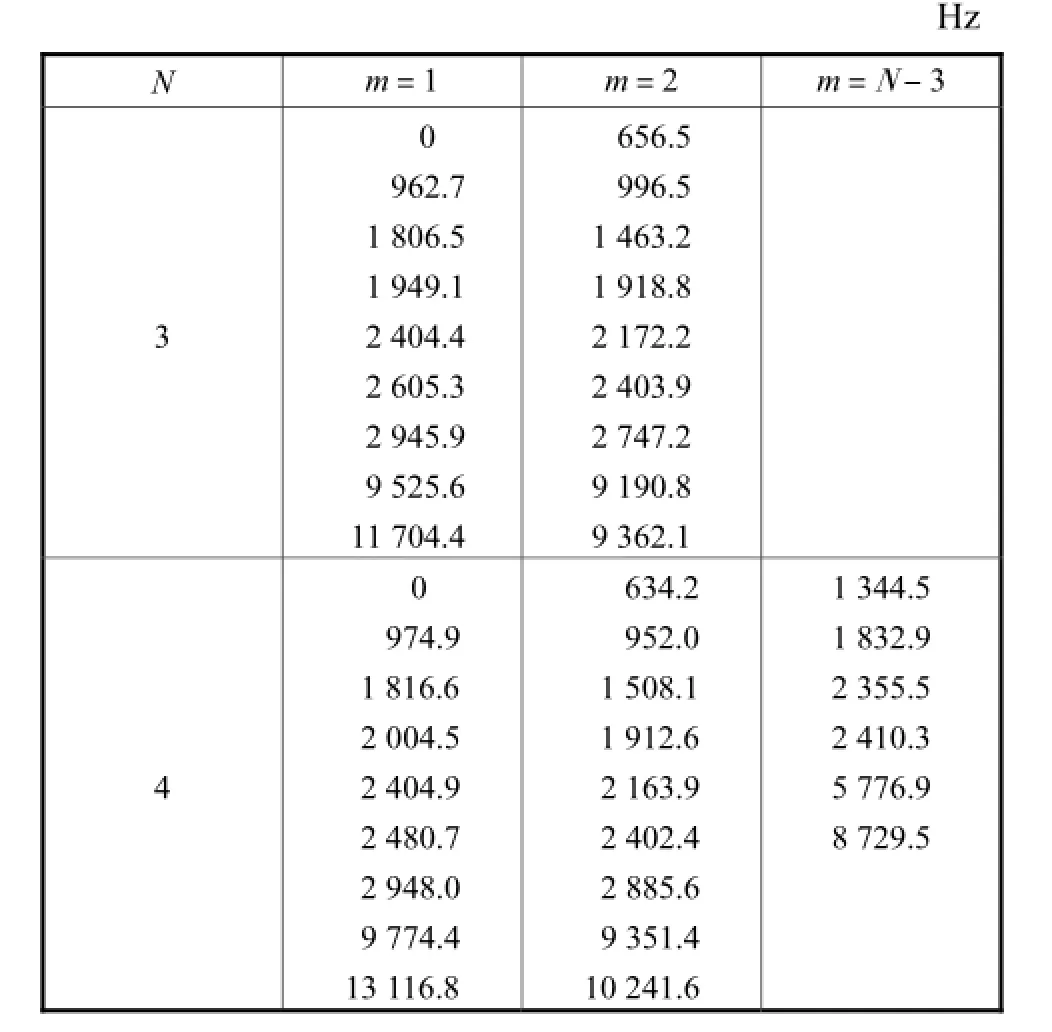
由行星轮系的同心、装配和邻接条件,可知该NW型行星传动的均布行星轮个数可取3或4.对于N=3及N=4的2种情形,计算系统各阶固有频率如表2所示,其中m为固有频率的重根数.
Hz N m=1 m=2 m=N-3 3 1000 1 962.7 1 806.5 1 949.1 2 404.4 2 605.3 2 945.9 9 525.6 11 704.4 1 656.5 1 996.5 1 463.2 1 918.8 2 172.2 2 403.9 2 747.2 9 190.8 9 362.1 4 0 1 974.9 11 816.6 12 004.5 12 404.9 12 480.7 12 948.0 19 774.4 13 116.8 11 634.2 11 952.0 11 508.1 11 912.6 12 163.9 12 402.4 12 885.6 19 351.4 10 241.6 1 344.5 1 832.9 2 355.5 2 410.3 5 776.9 8 729.5
进一步分析可知系统各阶固有频率所对应的振型坐标.经归纳可知NW型直齿行星传动中存在如下3种典型振动模式,即中心构件扭转振动模式、中心构件平移振动模式和双联行星轮振动模式.各种振动模式的特点如下.
(1) 中心构件扭转振动模式.当1m=时,各中心构件(太阳轮、内齿圈、系杆)仅做扭转振动,各双联行星轮做复杂平面振动,且相应行星轮的振动状态相同,而与行星轮个数无关.该振动模式的振型如图4(a)所示.
(2) 中心构件平移振动模式.当2m=时,各中心构件做平移振动,各双联行星轮做复杂平面振动,且振动状态与行星轮个数相关.当4N=时,各双联行星轮振动状态呈轴向反对称;其他情况下,各双联行星轮振动状态互不相同.该振动模式的振型如图4(b)和 5(b)所示.
(3) 双联行星轮振动模式.当m=N−3(N>3)时,各中心构件不振动,仅双联行星轮振动,且振动状态与行星轮个数相关.当N=4时,相应行星轮的振动状态呈轴向对称;其他情况下,各双联行星轮振动状态互不相同.该振动模式的振型如图5(c)~(e)所示.该模式下双联行星轮的振动按其特点又可细分为行星轮1、2同时做复杂平面振动、行星轮1单独做平移振动和行星轮2单独做平移振动3种方式.为区别于NGW型传动的行星轮模式,本文将之分别定义为行星轮同振模式、行星轮左振模式和行星轮右振模式.
图4、图5分别示出了3N=、4N=时系统不同振动模式下的振型.图中,虚线表示各构件的初始位置,实线为构件振动后的位置,实线段为各构件振动后的横轴线.为表达清晰,图中均未绘出系杆的位置.
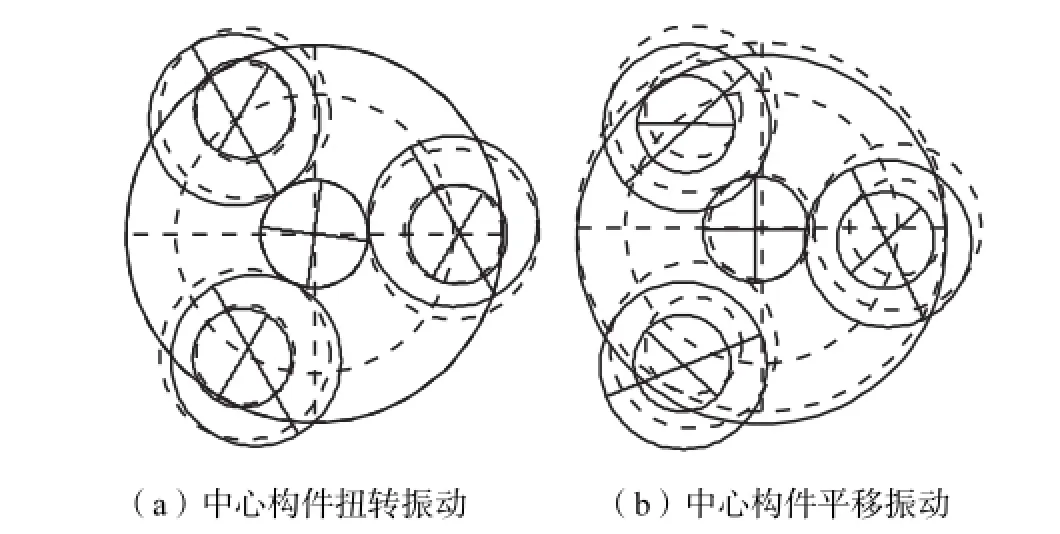
图4 3N=时NW型行星传动振型Fig.4 Vibration modes of NW planetary gear unit when N=3
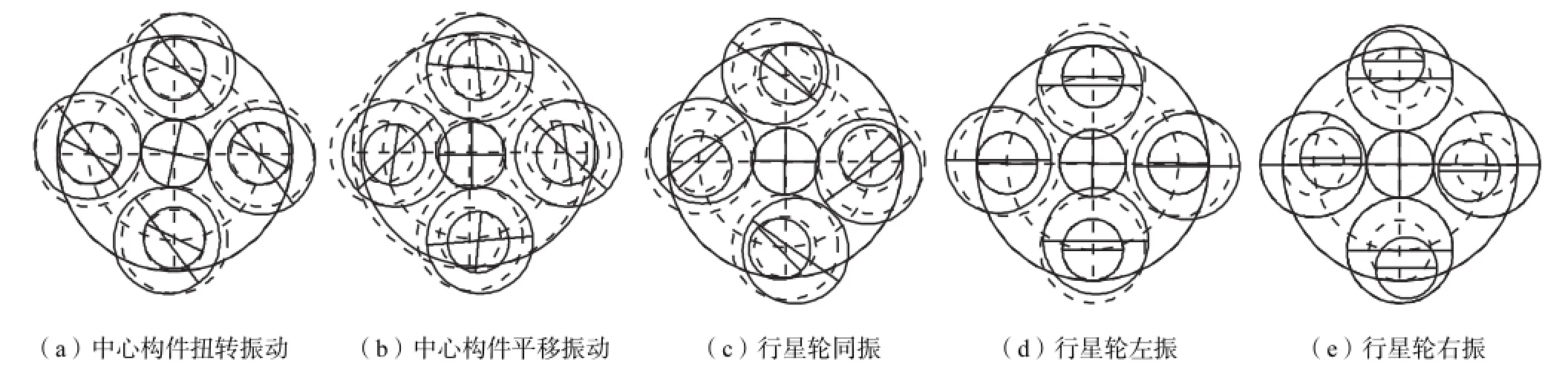
图5 N=4时NW型行星传动振型Fig.5 Vibration modes of NW planetary gear unit when N=4
由图5可知,NW型直齿行星传动的中心构件扭转振动模式和中心构件平移振动模式与NGW型相似[3],但其行星轮振动模式较为复杂.
不难推测,正是由于双联行星轮结构的引入,造成了NW型行星传动中行星轮的振动模式趋于多样化,使得其不仅存在双联行星轮同振模式,还同时存在行星轮左振和右振模式.特别是行星轮左振和右振模式中行星轮仅做横向平移振动,这与NGW型传动中行星轮的振动状态有很大不同,在进行NW型行星传动行星轮振动抑制时应予以重视.
为明晰系统中各构件支承刚度与系统振动模式间的映射关系,现分别考察内齿圈、太阳轮、系杆、行星轮支承刚度对系统固有特性的影响.
不失一般性,仍以表1所示的NW型直齿行星传动为对象,分析4N=时构件支承刚度与系统振动模式间的关系.
以内齿圈为例,其安装方式可分为完全浮动、周向浮动、径向浮动和完全固定4种情况.为分析上述情况下系统的固有特性,设定太阳轮、系杆和行星轮的径向支承刚度为108,N/m,太阳轮和系杆的扭转支承刚度均为0,内外齿轮副啮合刚度均取5× 108N/m,双联行星轮扭转线刚度取5× 107N/m,且相应工况下内齿圈径向和周向支承刚度设置为内齿圈完全浮动:krx=kry=kru=0;内齿圈周向浮动:krx=kry=内齿圈径向浮动内齿圈完全固定
对式(11)求解特征值问题,可得不同工况下系统各阶固有频率,其计算结果如表3所示.
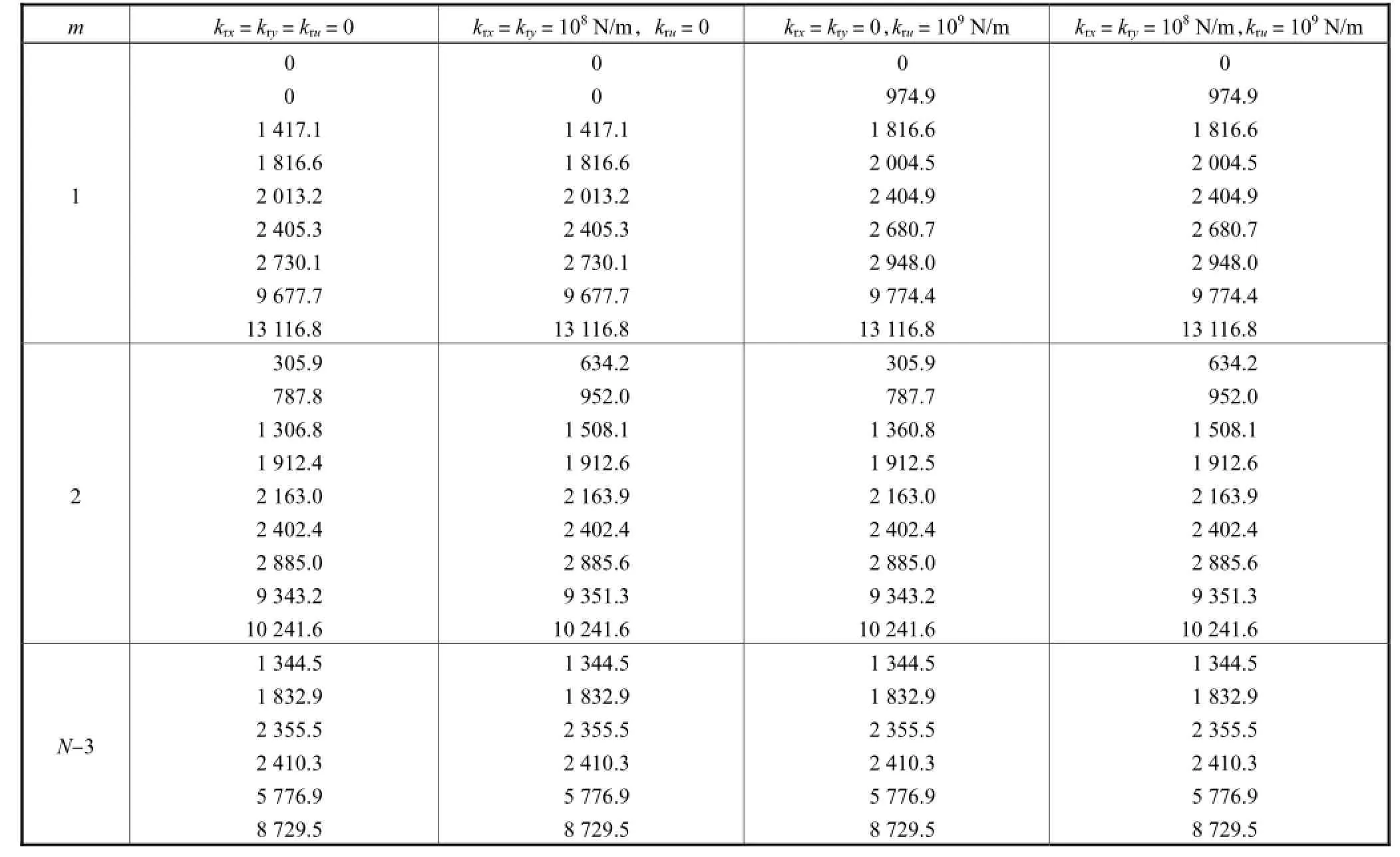
表3 不同工况下NW型行星传动固有频率Tab.3 Natural frequencies of NW planetary gear unit under different conditions Hz
由表3可知NW型直齿行星传动的振动模式与内齿圈支承刚度间存在如下映射关系:
(1) 中心构件扭转振动模式仅受内齿圈周向支承刚度的影响,而与内齿圈径向支承刚度无关;
(2) 中心构件平移振动模式仅受内齿圈径向支承刚度的影响,而与内齿圈周向支承刚度无关;
(3) 行星轮振动模式既不受内齿圈径向支承刚度也不受周向支承刚度的影响.
采用类似的方法可分析太阳轮、系杆、行星轮各向支承刚度的影响.限于篇幅,本文不再详列,仅给出分析结论如下.
(1) 中心构件的支承刚度仅影响中心构件的振动模式,而对行星轮振动模式不产生影响.具体而言,中心构件的周向支承刚度仅影响中心构件的扭转振动模式;中心构件的径向支承刚度仅影响中心构件的平移振动模式.
(2) 双联行星轮的径向支承刚度和扭转刚度对系统3种振动模式均有影响.
3 结 论
(1) NW型直齿行星齿轮传动具有3种典型振动模式,即:中心构件扭转振动模式、中心构件平移振动模式和双联行星轮振动模式.其中,行星轮振动模式又可细分为行星轮同振模式、行星轮左振模式和行星轮右振模式,此点与NGW型行星传动颇为不同.
(2) NW型直齿行星齿轮传动的振动模式与系统中构件的支承刚度间存在确定映射关系,即:中心构件的支承刚度仅影响中心构件相应方向上的振动模式,而行星轮的支承刚度则影响系统的全部3种振动模式.
[1] 饶振纲. 行星齿轮传动设计[M]. 北京:化学工业出版社,2003.
Rao Zhengang. Design of Planetary Gear Transmission[M]. Beijing:Chemical Industry Press,2003(in Chinese).
[2] Kahraman A. Natural modes of planetary gear trains[J]. Journal of Sound and Vibration,1994,173(1):125-130.
[3] Lin J,Parker R G. Analytical characterization of the unique properties of planetary gear free vibration[J]. ASME Journal of Vibration and Acoustics,1999,121(7):316-321.
[4] Kahraman A. Free torsional vibration characteristics of compound planetary gear sets[J]. Mechanism and Machine Theory,2001,36:953-971.
[5] 宋轶民,许伟东,张 策,等. 2K-H行星传动的修正扭转模型建立与固有特性分析[J]. 机械工程学报,2006,42(5):16-21.
Song Yimin,Xu Weidong,Zhang Ce,et al. Modified torsional model development and natural characteristics analysis of 2K-H epicyclic gearing[J]. Journal of Mechanical Engineering,2006,42(5):16-21(in Chinese).
[6] 孙 涛,刘继岩. 行星齿轮传动非线性动力学方程求解与动态特性分析[J]. 机械工程学报,2002,38(3):10-15.
Sun Tao,Liu Jiyan. Study on nonlinear dynamic behavior of planetary gear train solution and dynamic behavior analysis[J]. Journal of Mechanical Engineering,2002,38(3):10-15(in Chinese).
[7] Lin J,Parker R G. Planetary gear parametric instability caused by mesh stiffness vibration[J]. Journal of Sound and Vibration,2002,249(1):129-145.
[8] 孙智民,沈允文,李素有. 封闭行星齿轮传动系统的扭转振动特性研究[J]. 航空动力学报,2001,16(2):163-166.
Sun Zhimin,Shen Yunwen,Li Suyou. A study on torsional vibrations in an encased differential gear train[J]. Journal of Aerospace Power,2001,16(2):163-166(in Chinese).
[9] 魏大盛,王延荣. 行星轮系动态特性分析[J]. 航空动力学报,2003,18(3):450-453.
Wei Dasheng,Wang Yanrong. The dynamic characteristics analysis of planet gear train[J]. Journal of Aerospace Power,2003,18(3):450-453(in Chinese).
[10] Ambarisha V K,Parker R G. Suppression of planet mode response in planetary gear dynamics through mesh phasing[J]. ASME Journal of Vibration and Acoustics,2006,128(4):133-142.
[11] 张 俊,宋轶民,张 策,等. NGW型直齿行星传动自由振动分析[J]. 天津大学学报,2010,43(1):90-94.
Zhang Jun,Song Yimin,Zhang Ce,et al. Analysis of free vibration of NGW spur planetary gear set[J]. Journal of Tianjin University,2010,43(1):90-94(in Chinese).
[12] 刘 欣. 基于虚拟样机技术的直齿行星传动动力学研究[D]. 天津:天津大学机械工程学院,2007.
Liu Xin. Dynamics of Spur Planetary Gear Trains Based on Virtual Prototyping[D]. Tianjin:School of Mechanical Engineering,Tianjin University,2007(in Chinese).
Dynamic Modeling and Eigenvalue Evaluation of NW Spur Planetary Gear Unit
ZHANG Jun1,2,SONG Yi-min1
(1. School of Mechanical Engineering,Tianjin University,Tianjin 300072,China;2. School of Mechanical Engineering,Anhui University of Technology,Maanshan 243002,China)
An analytical translational-rotational-coupling dynamic model was developed to evaluate the inherent characteristics of NW spur planetary gear unit. By deriving the displacement relationships between gears and carrier,the governing differential equations were obtained. The solution to associated eigenvalue problem led to natural frequencies and free vibration modes of transmission. The vibration modes are classified into three categories,i.e.,rotational mode,translational mode,and planet mode based on their unique properties. And planet mode can be further classified into three sub-categories:global-planet sub-mode,left-planet sub-mode and right-planet sub-mode. The investigation into component stiffness reveals that the radial and circumferential stiffness of central component only influences rotational and translational modes,while the radial and torsional stiffness of planet affects all the three modes.
spur planetary gear unit;dynamic modeling;inherent characteristics;natural frequency;vibration mode
TH132.4
A
0493-2137(2011)08-0677-06
2009-10-13;
2010-11-01.
国家自然科学基金资助项目(50205019,50905122).
张 俊(1981— ),男,博士,副教授.
张 俊,zhang_jun@tju.edu.cn.
猜你喜欢
上海公路(2019年2期)2019-10-08
城市道桥与防洪(2019年5期)2019-06-26
城市道桥与防洪(2019年5期)2019-06-26
城市道桥与防洪(2019年5期)2019-06-26
制造技术与机床(2018年9期)2018-09-19
机械设计与制造(2018年1期)2018-01-19
中央社会主义学院学报(2017年1期)2017-04-16
新疆钢铁(2015年3期)2015-11-08
中国工程咨询(2015年6期)2015-02-16
汽车维修与保养(2013年2期)2013-07-25
- 天津大学学报(自然科学与工程技术版)的其它文章
- 橡胶混凝土抗冲磨性能
- 稿 约