
基于神经网络逆复合控制器的MDF施胶系统的控制设计1)
2012-06-13 06:20孙丽萍
东北林业大学学报 2012年1期
王 颖 孙丽萍
(东北林业大学,哈尔滨,150040)
在中密度纤维板(MDF)生产过程中,将胶黏剂和其他添加剂(如防水剂、固化剂、缓冲剂、填充剂等)按比例均匀施加到构成纤维板的基本单元上,称为MDF施胶[1]。影响中密度纤维板产品质量和生产成本的其中一个重要因素是胶黏剂组分配比的准确性、施胶量与原料配比的精确性。施胶系统能否按规定比例均匀施胶是衡量中密度纤维板施胶技术优劣的标志。系统施胶量的不稳定,会导致产品质量不合格,浪费原料、增加生产成本。采用先进的施胶控制技术,使胶的配比及用量自动接近或达到最佳状态,对降低成本、提高产品质量有重要的现实意义[2-3]。因此,本文利用神经网络逆控制与经典控制理论相结合的方法,设计出一种新的复合控制器来实现MDF的施胶控制。
传统的逆控制方法需要了解被控对象精确的数学模型,才能构造出被控系统的逆系统。而在实际生活中多数系统的模型是复杂或不确定的,这为构造正确的逆模型带了困难。神经网络逆控制原理为构造逆模型带来了新的方法,避免了构造逆模型时对被控系统精确模型的要求。本文将MDF施胶系统作为被控系统,利用BP网络和若干积分器来逼近被控系统的逆系统,然后将经过训练的神经网络逆系统串接在被控系统之前,对MDF施胶系统进行“线性化”处理。由逆系统与被控对象构成的新系统通常是伪线性的,若是仅将神经网络逆控制系统作为单一的控制器,可能无法获得良好的控制效果。由此笔者将PID控制器与神经网络逆系统结合在一起,构建出神经网络逆复合控制器,并对MDF施胶系统进行控制和仿真试验。
1 神经网络α阶逆系统控制方法
定义1[4]:设系统Πα为另一个具有映射关系为的q维输入、p维输出的系统,其中,输入φ(t)=(φ1,φ2,…,φq)T为一给定的连续函数向量,该向量的初值满足于系统∑的初值条件,输出u(t)=(u1,u2,…,up)T。如果取(α1,α2,…,αp)T,即 φi定义为ydi的 αi阶导数,且算子满足下式:

则称系统Πα为原系统∑的α阶积分逆系统,简称α阶逆系统。
神经网络α阶逆系统复合控制方法的主要思想是利用静态神经网络加若干时延因子或积分器来实现α阶逆系统的功能,其中静态神经网络仅用来逼近静态非线性函数,时延因子或积分器则用于反映系统的动态特性;然后将α阶逆系统与被控系统串联在一起,就可以构成具有α阶积分特性的伪线性复合系统s-α,如图1所示。此时对非线性、参数不确定的系统的控制问题已经转化为对线性系统的控制。然后运用经典控制理论中的各种方法,针对新构成的伪线性复合系统,设计出合适的附加线性控制器,最后将神经网络α阶逆系统与附加线性控制器组合起来,构成复合控制器,从而实现对被控系统的有效控制[5-6]。

图1 基于α阶逆系统的SISO系统线性化示意图
对于满足一定条件的未知的单输入单输出、离散或连续线性、非线性系统,神经网络α阶逆系统控制方法均可使用。神经网络α阶逆系统控制方法的优势在于无须知道被控系统或逆系统的数学模型,只要满足被控系统的逆系统存在且唯一这一条件即可,避免了传统的逆系统方法不仅需要知道原系统的数学模型,而且需要知道逆系统的数学模型的需求。因而神经网络α阶逆系统控制方法具有较广的应用范围。
2 MDF施胶系统的神经网络逆复合控制
2.1 MDF施胶原模型可逆性及系统分析
作为原系统的MDF施胶系统开环模型包括变频器、异步电动机、胶泵管道3个环节。如图2所示,MDF施胶系统的输入为变频器的给定频率,输出为施胶量。异步电机由变频器供电,改变变频器的频率就可以方便地调节电机的转速,实现对施胶量的调控。在实际中,施胶系统的稳态增益和阶跃响应是随着胶液流量大小的变化而变化。因此MDF施胶系统是一个典型的单输入单输出非线性系统。

图2 MDF施胶系统开环模型
构造神经网络逆复合控制器的主要工作是设计并实现神经网络逆系统。实施神经网络逆控制的前提是确定被控系统是否可逆。对于离散的非线性单输入单输出系统:
y(k+1)=f[y(k),…,y(k-n),u(k),…,u(k-m)]。
式中:y(k)∈R、u(k)∈R分别是系统的输出和输入;n为系统阶次;m为输入延迟,m≤n;f是一非线性函数。
给定[y(k),…,y(k-n),u(k),…,u(k-m)],当任意的输入u1≠u2,有:
f[y(k),…,y(k-n),u1(k),…,u1(k-m)]≠f[y(k),…,y(k-n),u2(k),…,u2(k-m)],则称该系统是可逆的[7]。
当MDF施胶系统的输入量r(t)是给定频率,输出量y(t)是施胶量输出信号时,对于不同的输入,系统的输出不同,即对于任意输入r1(t)≠r2(t),有y1(t)≠y2(t),因此,可以判断该系统是可逆的。
由于MDF施胶系统结构之间通常存在滞后、外界干扰等多种因素,很难获得精确的数学模型。当被控系统的数学模型无法准确获知时,可通过对被控对象的动态特性分析或根据先验知识和经验确定被控系统的阶数和相对阶,从而直接构造神经网络逆系统。根据参考文献[8]可知,MDF施胶系统的开环系统控制模型一般在2~4阶之间变化,在中频工况(输入25 Hz和30 Hz激励)下的MDF施胶系统一般为3阶系统。根据实际设备的动态特性以及工艺的变化对系统结构进行调整,其相对阶α在0~3阶变化。将训练好的神经网络逆系统串接在原系统之前构成α阶线性系统,这样就将原系统转化成为y=s-αφ(s)型的线性单输入单输出系统。
2.2 MDF施胶系统的神经网络逆复合控制结构
由于在神经网络逆模型辨识中存在一定的误差,并且神经网络逆系统与被控系统复合而成的新系统通常不是一个理想的线性系统,而是有着固有物理特性的“近似”线性化的系统,虽然将神经网络逆系统直接作为单一的控制器可以使系统的构造简单化,但其实际的控制效果很难达到理想要求。所以不能简单地将神经网络逆控制系统作为唯一的控制器,必须设计附加控制器与神经网络逆系统一起组成神经网络逆复合控制器,从而使系统获得优良的静、动态特性与抗干扰能力。根据经典控制理论,采用常见的PID控制器作为附加控制器。PID反馈控制在控制作用补偿、鲁棒性方面起了主要作用,进一步实现了对“近似”线性化系统的控制,在一定程度上改善或提高了被控系统的性能。
MDF施胶神经网络逆复合控制系统的基本结构可以用图3表示,逆系统由静态神经网络加若干积分器来实现α阶逆系统的功能,积分因子个数由相对阶α决定。复合控制器包括神经网络逆系统本身与作为附加控制器的PID控制器两个部分。
3 试验与仿真
3.1 神经网络逆系统训练
确定了静态神经网络逆系统的结构后,还需要对神经网络逆系统进行学习、训练,使静态神经网络真正实现其要逼近的非线性运算。一旦静态神经网络能达到此目的,则由静态神经网络加上积分器构成的神经网络逆系统就真正成为被控系统的逆系统。神经网络逆模型的输入是施胶量,输出是变频器的频率。根据参考文献[9],将Gs=((0.008 438s+0.3)e-3.73)/(s2+1.382s+0.162 7)作为施胶系统的理想模型进行仿真研究。给理想模型输入一个25 Hz的激励信号,并采样得到1 000个数据样本。其中500个样本用来在Matlab中训练逆模型,另外500个用于测试逆模型。MDF施胶系统的逆模型仿真在Matlab的Simullnk环境下进行,施胶系统神经网络逆模型的模块通过子系统封装的方式实现。
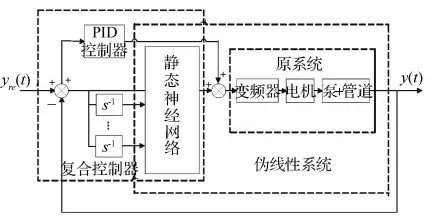
图3 MDF施胶系统的神经网络逆控制结构
图4为MDF施胶系统的静态神经网络逆系统的离线训练示意图。静态神经网络的离线训练包括两个部分内容:对原系统的激励和对静态神经网络的离线训练。图4中的微分器S,用于网络获取相应的各阶导数,其个数同样由相对阶α决定。根据理想模型,本文在仿真中采用了1个3层前馈神经网络和1个积分因子组成神经网络α阶逆系统。静态神经网络有2个输入结点、1个输出结点和1个隐层,隐层的结点数为7。
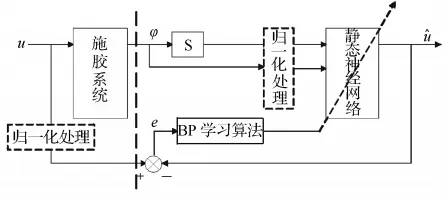
图4 神经网络逆系统的离线训练示意图
3.2 系统仿真
本文对神经网络逆复合控制的控制效果进行了仿真,图5为神经网络逆复合控制的单位阶跃响应曲线。对于MDF施胶系统来说,最关心的是超调量、上升时间这两个指标。系统是否能够快速响应达到稳定,直接影响生产的产品质量和成本。超调量越低,上升时间越短,施胶系统就越稳定;施胶量越稳定,原料浪费程度越低。由图5可以看出,在无干扰情况下,神经网络逆复合控制方法的超调量低于5%,控制系统阶跃响应的上升时间比较短。体现出神经网络逆复合控制方法对系统具有很好的控制效果。
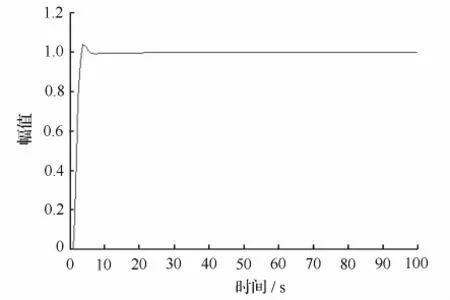
图5 神经网络逆复合控制单位阶跃响应曲线
对于施胶系统来说,仅是系统的阶跃响应并不能反映出系统是否具有良好的稳定性和跟踪性。因此给复合控制系统施加一个不规则方波输入信号,它的跟踪特性如图6所示。虚线代表输入信号波形,实线代表输出信号波形。当给定信号幅值与频率都改变时,系统能够对给定信号实现有效的跟踪。
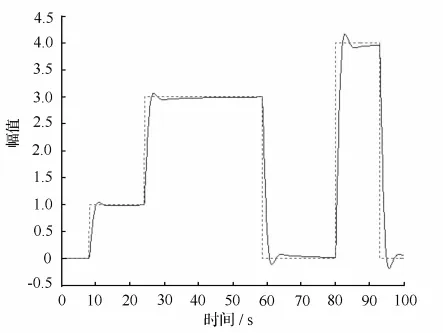
图6 神经网络逆复合控制方波响应曲线
以上是在无干扰情况下的系统仿真。为了考察复合控制施胶系统的抗干扰性,本文在复合系统的通道中施加了一个持续的不规则干扰信号。对系统施加扰动后方波响应曲线为图7所示,与图6比较,方波变化不明显。由此可以看出,神经网络逆复合系统具有很强的抗干扰能力。
为验证所设计的复合控制器的控制效果,本文在东北林业大学研制的MDF—1型中密度纤维板调施胶过程控制系统实验装置上进行了试验。系统的胶液流量设定值设置为9.00 L/min,当施胶流量(施胶流量是通过电磁流量计对施胶量进行测量)输出稳定时,每隔30 s记录1次数据,如表1所示。由表1可以看出,本文所建立的系统模型的实际输出可以较好地接近系统的设定值。这说明采用神经网络逆复合控制对中密度纤维板施胶系统进行控制的方法是可行的。
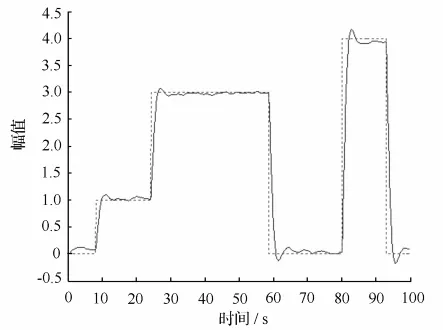
图7 对复合控制系统施加干扰后的方波响应曲线

表1 仿真试验结果
4 结论
针对MDF施胶系统,本文使用神经网络求取逆模型,并结合经典控制理论设计出一种新型的复合控制器模型。神经网络逆系统控制方法的优势在于无须知道被控系统或逆系统的数学模型,只需了解被控系统的动态特性或根据先验知识和经验确定被控系统的阶数和相对阶,即可实现神经网络逆系统的直接构造,避免了逆系统求取困难的问题,并体现出神经网络逆控制方法具有较广的应用范围。根据神经网络逆控制具有结构简单、抗干扰能力强、鲁棒性好的优点,同时结合PID快速响应、可靠性高的优势,设计出适用于MDF施胶系统的神经网络逆复合控制器。经过仿真验证,所设计的神经网络逆复合系统响应时间短、超调量小,具有良好的稳定性和跟踪性,抗干扰能力强,可满足施胶系统的工艺要求,为MDF施胶系统的控制方法提供了一个新的思路。
[1]花军,曹军,唐铉峰.纤维板的调施胶技术[J].东北林业大学学报,2005,33(1):96-98.
[2]孙延明,刘亚秋.浅析中密度纤维板施胶控制研究现状[J].木工机床,2006(2):15-17.
[3]祖海燕,陈雪梅,张怡卓.中密度纤维板调施胶技术的应用和发展趋势[J].木工机床,2007(2):10-13.
[4]戴先中.多变量非线性系统的神经网络逆控制方法[M].北京:科学出版社,2005.
[5]刘军,戴先中.神经网络α阶逆系统控制方法的可行性[J].电力系统自动化,1997,21(5):15-18.
[6]戴先中,刘军.神经网络α阶逆系统的结构、辨识及其在控制中的应用[J].电力系统自动化,1997,21(7):1-4.
[7]祖海燕,孙丽萍,刘德胜.基于支持向量机中纤板施胶系统逆模型的辨识[J].林业科学,2010,46(2):171-174.
[8]刘德胜.刨花板施胶动力学特性分析与鲁棒控制研究[D].哈尔滨:东北林业大学,2009.
[9]郭继宁,朱良宽,孙丽萍.基于LMI的刨花板施胶鲁棒H∞控制[J].东北林业大学学报,2010,38(6):84-86.
猜你喜欢
遥测遥控(2022年1期)2022-02-11
造纸化学品(2019年4期)2019-09-18
国际木业(2018年3期)2018-09-10
国际木业(2016年12期)2016-12-21
广西林业科学(2016年1期)2016-03-20
中国造纸学报(2015年1期)2015-12-16
造纸化学品(2015年1期)2015-11-04
电测与仪表(2015年21期)2015-04-09
组合机床与自动化加工技术(2014年10期)2014-03-01
现代防御技术(2014年5期)2014-02-28
