
基于SSR和ADS-B混合监视的机载编队防撞系统设计✴
2012-06-28 16:51彭良福林云松黄勤珍
电讯技术 2012年5期
彭良福,林云松,黄勤珍
基于SSR和ADS-B混合监视的机载编队防撞系统设计✴
彭良福1,林云松2,黄勤珍1
(1.西南民族大学电气信息工程学院,成都610041;2.电子科技大学自动化工程学院,成都610054)
由于设备性能的限制,民航飞机目前使用的机载防撞系统TCASⅡ不能适用于编队飞行防撞。为了解决飞机编队飞行防撞以及与民航飞机TCASⅡ兼容的问题,给出了一种基于二次雷达(SSR)和ADS-B混合监视的机载编队防撞系统的设计方案。该方案采用了TCAS主动监视和被动监视相结合的方法,利用唯一的24位S模式地址来识别和归类目标飞机,将TCAS的监视数据和ADS-B的监视数据进行数据融合来完成对目标飞机的监视和跟踪。通过将大型编队划分为多个编队单元的方法,由长机负责保持各个编队单元之间的安全间距。采用收发器将长机产生的位置保持和碰撞避免的操纵指令通过高频数据链路传送给各个编队单元,各个编队成员按照操纵指令调整自己飞机的位置,完成对整个编队的位置保持和碰撞避免的集中控制和分散执行。该方案可以为机载编队防撞系统的设计和实现提供参考和帮助。
机载防撞系统(TCAS);编队飞行防撞;广播式自动相关监视(ADS-B);二次雷达;混合监视
1 引言
目前民航飞机广泛使用的机载防撞系统(TCASⅡ),其工作原理是利用TCAS的询问和应答机的应答来确定飞机之间的相对距离和方位,其位置精度和设置的告警门限均不能满足编队飞行的要求[1],因此不能应用于飞机编队飞行时的防撞。对于飞机尤其是军用飞机来说,有时需要2架甚至多达100架飞机保持编队位置和间距,在夜间或全天候执行精确的空投、集结、空中加油等飞行任务。随着广播式自动相关监视(ADS-B)技术的发展和应用,可以通过ADS-B广播信息获得目标飞机的精确的经度、纬度和高度等信息[2],为实现飞机的近距离编队飞行防撞提供了可能。美国Honeywell公司开发的增强型机载防撞系统(Enhanced Traffic Alert Collision Avoidance System,ETCAS)不仅可以提供TCAS常规的监视和防撞功能,而且可以为军用飞机提供编队功能[3]。但是ETCAS只能为编队飞机提供空中的态势感知,而不能控制和消除编队飞机之间的位置偏差。此外,当ETCAS工作于编队模式时,采用的仍然是TCAS主动询问的监视技术,当密集编队飞行时大量的TCAS同时询问将产生严重的射频干扰,因此不适用于大型编队的情况。本文提出了一种将ADS-B技术与传统的机载防撞系统(TCAS)相结合,实现飞机编队飞行防撞的技术方案。
2 机载编队防撞系统的组成和功能
2.1系统的组成
机载编队防撞系统主要由机载防撞系统(TCAS)、S模式应答机、全球导航卫星系统/惯性导航系统(GNSS/INS)、大气数据计算机、飞行任务计算机、收发器、控制单元、显示器等组成,如图1所示。

图1 编队飞行防撞系统的结构示意图Fig.1 Schematic block diagram of the collision avoidance system for formation flight
(1)机载防撞系统
即满足RTCA DO-185A《空中交通预警和防撞系统机载设备》所定义的飞机防撞设备TCASⅡ[4]。在机载编队防撞系统中,对TCAS进行了改进和增强。它不仅具有ADS-B IN的功能,而且除了具有TCAS正常的工作模式(主动监视模式)之外,还可以工作在被动监视模式。
(2)S模式应答机
即满足RTCA DO-181A《空中交通管制雷达信标系统/模式选择(ATCRBS/MODE S)机载设备》所定义的S模式应答设备[5]。它不仅具有地面和空中询问功能,而且还具有ADS-B OUT的功能,能够产生和发送ADS-B广播数据。这种ADS-B广播数据包含了飞机的位置信息(经度、纬度和高度)、速度信息、身份标识信息(例如24位S模式地址)、意图信息等[6]。
(3)全球导航卫星系统/惯性导航系统(GNSS/INS)
GNSS主要指美国的全球定位系统(GPS),也可以包括俄罗斯的GLONASS、欧洲的GALILEO、中国的COMPASS/BD2系统。INS即采用陀螺仪和加速度计等惯性敏感器件的自主式导航系统。GPS接收机为系统提供飞机当前的位置信息(经度、纬度和高度)和时间信息。
(4)大气数据计算机
它根据传感器测得的气流的静压、总压、总温等,计算出与大气数据有关的参数,例如飞行高度、升降速度、真实空速、马赫数等,传送给座舱显示、飞行控制、导航等机载系统。
(5)飞行任务计算机
即完成航空电子系统主要任务相关功能的计算机,它包括飞行管理、数据融合、显示处理、编队内定位防撞控制等功能。
(6)收发器
收发器可以是任何类型的无线通信系统,其工作频率不同于S模式应答机/TCAS询问和应答信道的频率(1 030 MHz和1 090 MHz)。其作用是在编队飞机之间建立高频数据链路,并通过该数据链路收发数据。
(7)控制单元
控制单元用于选择各个组件的功能。主要为S模式应答机、TCAS(主动模式和被动模式)、收发器和显示器的控制功能提供选择。
(8)显示器
显示器用于显示飞机周围的空中交通和告警指示。显示器是一个或者多个显示单元,通常与ARINC735A显示总线协议兼容。
2.2系统的功能和特点
机载编队防撞系统具有主动监视和被动监视的功能,以及SSR数据和ADS-B数据融合的功能。可以以每秒两次的速率更新飞机的位置、速度、航向、飞机标识符等信息。具有编队内定位和防撞的功能,能够在夜间/仪表飞行气象条件下(IMC),支持2~100架飞机保持正确的编队位置和安全的间隔距离。允许在仪表飞行规则(IFR)的所有高度下,使飞机的位置间距在152~3 704 m的范围内任意选择。当其他的非编队飞机穿越到编队飞机预先确定的某个告警周界时,系统会自动向飞行员发出提示和告警。具有显示近距离空域的功能,可以选择显示0.926 km、9.26 km、18.52 km、37.04 km、74.08 km、148.16 km范围的空域情况,此外还可以显示飞机的相对速度。
机载编队防撞系统具有以下特点。
(1)利用高频数据链路来发布编队内部的操纵指令,提供了对大型飞行编队进行飞机定位和间距保持的一种手段。
(2)利用飞机的任务计算机作为数据融合中心,将TCAS主动监视的信息和ADS-B被动监视的信息进行融合,根据接收到的来自TCAS、S模式应答机以及收发器的信息来产生操纵指令。
(3)在编队飞行时,只允许长机的TCAS工作在主动模式(可以主动询问),编队中其余飞机的TCAS均处于被动模式(不发送询问)。长机通过高频数据链路与编队中处于TCAS被动模式的飞机进行监视信息的共享。这种工作方式减少了同时发送多个TCAS询问以及S模式应答机的应答所产生的射频干扰。
(4)不仅提供了编队飞机和空域中的非编队飞机之间防撞的功能,而且也提供了编队内部成员之间碰撞避免的功能。
3 机载编队防撞系统的工作原理
通过对多个编队单元的集中控制和分散执行,机载编队防撞系统能够支持大型的编队飞行。系统采用了几种关键的技术,包括被动监视技术、ADSB和SSR数据融合技术、编队内成员飞机之间的无线通信技术、分层控制技术等。在编队飞行时,长机是整个编队中唯一的TCAS处于主动模式的飞机,只有长机可以主动发送询问,所有的编队成员的TCAS均处于被动模式。但是,编队成员可以通过S模式应答机周期性地广播(每秒两次)其自身的ADS -B信息,同时通过TCAS接收来自其他飞机的ADS -B信息。飞机的位置、相对高度和相对速度被显示在多功能显示器上。
3.1飞机的分类和编队单元的划分
为了实现编队防撞系统的功能,将飞机分为两种类型,一类是编队飞机,另一类是非编队飞机。其中,编队飞机又分为长机和编队成员飞机。编队飞行防撞系统采用集中控制和分散执行的方法,将大型的编队划分为多个编队单元,每个编队单元定义为2~25架飞机的小型编队。即一个大型的编队包含多个编队单元,每个编队单元包含2~25架成员飞机。整个大型编队只有一个长机,每个编队单元有一个组长。
3.2系统的工作模式
传统的TCAS只有一种工作模式,即主动监视模式,而编队防撞系统有3种工作模式,即主动监视模式(即TCAS正常工作模式,也称为长机模式)、被动监视模式(也称为编队成员模式)以及编队内部监视和防撞模式。
当系统处于主动监视模式时,可以主动向周围空域中的目标飞机进行询问,通过TCAS主动发送询问请求应答的方式来执行监视,同时还允许对ATC地面站的询问进行回答。
当系统处于被动监视模式时,TCAS的主动询问功能失效,不能主动地询问其他飞机,同时也禁止向ATC地面站发送消息。不过可以通过S模式应答机发送ADS-B广播信息以及通过高频数据链路发送监视信息,同时可以接收来自其他飞机的ADS-B广播信息,以及通过高频数据链路接收来自编队中其他飞机的监视信息。通过将这些信息进行处理来实现对目标飞机的跟踪和防撞计算。被动监视技术显著地降低了大型编队能够被探测到的距离,并且产生的射频干扰较少。图2给出了被动监视的处理流程。

图2 被动监视处理流程Fig.2 Processing flowchart of passive surveillance
除了主动监视模式和被动监视模式之外,机载编队防撞系统还有一种工作模式,即编队内部监视和防撞模式。当系统工作在编队内部监视和防撞模式时,只有长机的TCAS处于主动模式,编队内其余飞机的TCAS均处于被动模式。同时在编队内部通过收发器的高频数据链路建立了一个无线通信网络,该无线通信网络使具有主动模式TCAS的长机和具有被动模式TCAS的编队成员可以共享与当前空中/地面交通以及潜在碰撞威胁相关的数据。长机的TCAS可以使用监视和跟踪信息来计算其与目标飞机之间的相对距离、相对高度和相对方位角度以便根据其自身的飞行信息来确定接近的时间和潜在的碰撞威胁。长机得到的监视和跟踪信息包括经度、纬度、高度、空速、标识符、地速以及用于飞机态势感知的意图信息等。长机通过无线通信网络将监视和跟踪信息传达给编队内的其他成员。关于长机的位置数据也可以通过无线通信网络传达给其余的编队成员。TCAS处于被动模式的编队成员使用长机传达的监视信息来保持对周围空域中非编队飞机的态势感知,并且用这些监视信息在显示器上显示空中交通的情况。
当机载编队防撞系统工作于主动监视模式时,与传统的TCAS一样,有3种交通警戒和告警信息,即邻近信息(Proximate Advisory,PA)、交通信息(Traffic Advisory,TA)、解脱信息(Resolution Advisory,RA)。当系统工作于编队内部监视和防撞模式时,如果编队内的成员飞机之间存在潜在的碰撞威胁,那么将发出另一种告警信息,即冲撞告警(Blunder Alert,BA)。
对编队飞行来说采用被动监视主要有两个优点,一是目标飞机的定位精度基本上等于由飞机的GPS导航源确定的定位精度,机载编队防撞系统获得的目标飞机的相对方位角度的均方根小于2°[3];二是被动监视降低了射频发射的功率,不仅有利于降低射频干扰,而且有利于减小飞机被探测到的概率。
3.3系统的工作机制
在机载编队防撞系统中,TCAS与S模式应答机进行通信,同时与飞行任务计算机进行通信。飞行任务计算机接收和处理来自TCAS的ADS-B数据。处理的步骤包括通过接收到的ADS-B广播数据来计算目标飞机的距离、距离变化率、相对高度、高度变化率和方位角度,以便确定目标飞机是否正在侵入本机的监视空域。
在多个编队单元组成的大型编队中,系统使用被动TCAS和S模式应答机以及编队内部的高频数据链路来提供分布式的编队内部控制。一个大型的编队被分为多个较小的编队单元,每个编队单元都有一个组长,由组长负责维持编队单元内部各成员之间的安全间距。整个编队只有一个长机,长机是编队成员的信标,它负责保持多个编队单元之间的安全间距,通过对多个编队单元的分布式控制来支持大型编队的飞行。长机接收来自各个编队单元组长的数据。编队单元组长及成员的精确位置都可以用来自GPS接收机的导航数据准确地进行定位和跟踪。长机、编队单元组长,以及编队单元的成员都可以通过每架飞机的唯一的24位S模式地址或者是飞机标识码(Flight ID)来识别。长机融合所有编队单元的位置数据,由长机的飞行任务计算机的数据融合中心来完成这些数据的融合。长机接收来自编队单元组长的ADS-B位置信息,由飞行任务计算机计算出编队单元的位置和间距信息并产生编队内部定位和防撞的操纵指令,该操纵指令以分层的方式传送。首先,操纵指令通过高频数据链路按照唯一的24位S模式地址发送给各个编队单元的组长。编队单元组长在其自身的飞行管理系统(FMS)中处理这些操纵指令并且按照唯一的24位S模式地址将操纵指令转发给编队单元内部的其他成员,编队成员按照接收到的操纵指令由其自身的自动飞行控制系统(AFCS)来调整和保持编队单元内成员飞机之间的相对位置和间隔距离,实施对操纵指令的分散执行。这些操纵命令可能包括了各种命令,例如俯仰、滚转和推进等。
在机载编队防撞系统中,相对高度、高度变化率、距离和距离变化率(相对速度)对于防撞来说都是非常关键的因素。利用入侵飞机发送的ADS-B广播数据,可以取代相对位置的计算,计算出目标飞机精确的空中位置。在大多数情况下其误差不超过10 m。
飞行任务计算机中的数据融合中心与外围的数据链路设备接口,以采集由TCAS、S模式应答机、高频数据链路收发器提供的有效数据。由于这些数据是从多个独立的信号源获得的,代表了本机相对于其他飞机的不同视角的位置和状态,因此在采集的数据中可能包含了一些重复和矛盾的数据。通过使用数据融合算法可以消除重复和矛盾的数据,将这些数据关联到信息合理和一致的子集中[7-8]。利用经过融合后的数据,飞行任务计算机采用控制算法为自动飞行控制系统计算空速、高度、航向和节流阀目标,由自动飞行控制系统来控制编队内的飞机,同时根据这些控制数据来完成对编队内所有飞机协调后的飞行计划航线的改变。飞行任务计算机响应机组人员的输入,通过发送控制数据给S模式应答机和TCAS以产生射频发射或者使射频发射功率降至最低。
显示处理单元接收来自经过数据融合后的显示数据。这些数据可以集成显示在空中交通信息驾驶舱显示器(CDTI)上,这样可以增强空中态势感知并且为飞行员提供邻近空域中交通情况的清晰且简明的显示。图3给出了显示处理流程。
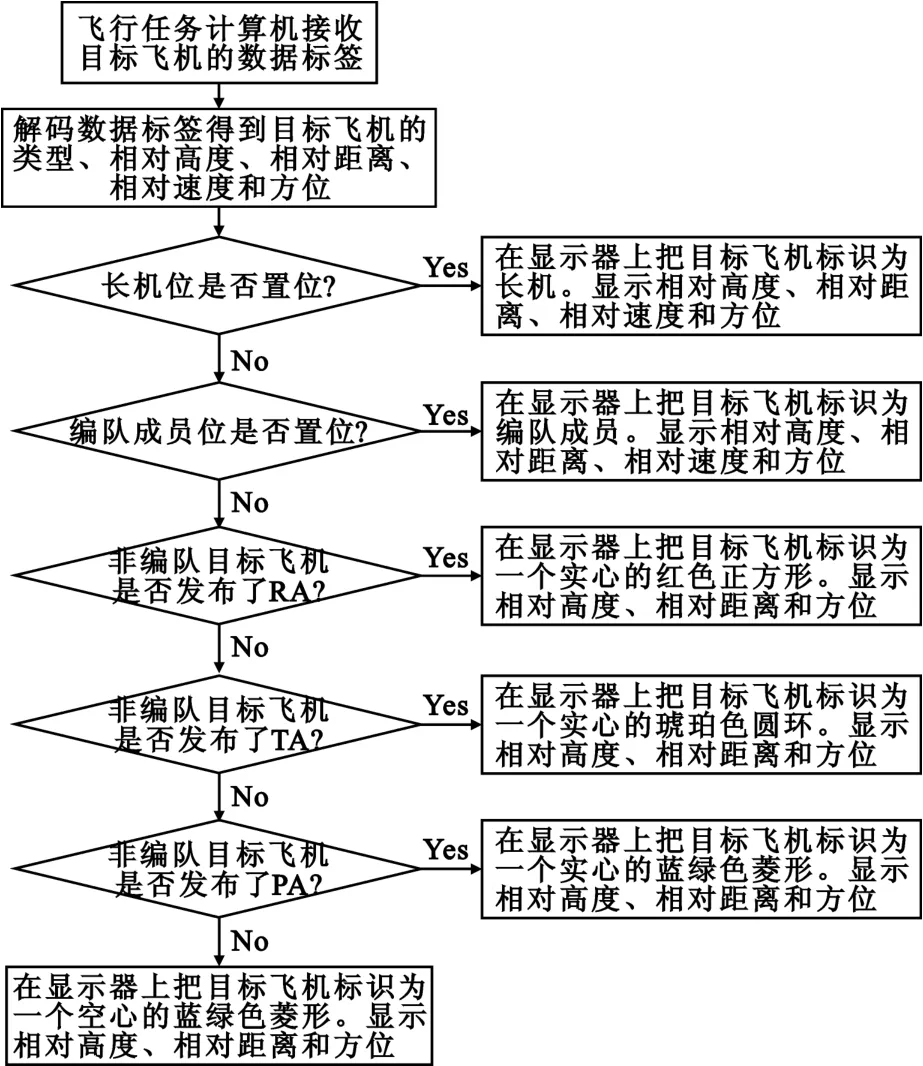
图3 显示处理流程Fig.3 Flowchart of display processing
3.3.1编队飞机与非编队飞机之间的防撞方法
非编队飞机即不参与编队的飞机。当多架装备了TCAS的飞机编队飞行时,只允许编队中的一架飞机(长机)的TCAS处于主动模式,而其余的编队成员的TCAS均处于被动模式。
TCAS与高频数据链路结合起来可以为处于TCAS被动模式的编队成员提供对周围空域中的非编队飞机进行监视跟踪和执行防撞计算的能力。处于TCAS主动模式的长机通过主动询问和接收应答信号来获得关于周围空域中非编队飞机的信息。当长机获得任何新的或者更新后的非编队飞机的空中交通信息时,可以用收发器通过一条高频数据链路将这些信息传送给处于TCAS被动模式的编队成员。长机的位置坐标作为监视信息的一部分也被提供给所有的编队成员,以便于编队成员确定其相对于长机的位置。当然,关于周围空域的非编队飞机的信息也可以通过接收来自周围空域的非编队飞机的ADS-B信息来获得。处于TCAS被动模式的编队成员采用这些有效信息的组合来监视非编队飞机和其他的编队成员。
编队成员的位置和身份标识信息可以通过其ADS-B信息广播进行交换。每架编队成员飞机可以确定其自身的相对位置、速度、高度和高度变化率,并将这些信息与由长机提供的非编队飞机的监视信息进行比较。通过这些比较,处于TCAS被动模式的编队成员可以确定与非编队飞机之间是否存在着潜在的碰撞威胁,同时根据监视信息和计算的相对位置来更新显示器上的空中交通信息。
能够接收TCAS询问和ADS-B广播数据的非编队飞机可以在其显示器上看见编队飞机。当系统工作在编队内部监视和防撞模式时,由于编队内的飞机紧密靠近,禁止发送交通信息(TA)和解脱信息(RA),因此当编队飞机与非编队飞机发生飞行冲突时,由于编队飞机不发送解脱信息(RA),因此机动避让的责任由非编队飞机承担,即非编队飞机应该主动避让编队飞机。
3.3.2编队内部飞机之间的防撞方法
在机载编队防撞系统中,监视信息不仅可以用于监视非编队的飞机,而且还可以用于监视编队内部的其他成员飞机。
机载编队防撞系统根据接收到的信息(例如通过高频数据链路传达的监视信息或者是广播的ADS -B信息)检查在编队成员之间是否存在着潜在的碰撞威胁。如果在编队成员之间出现了潜在的碰撞威胁,那么将产生一个冲撞告警(BA)而不是解脱信息(RA),同时系统会以听觉和视觉的方式向飞行员发布告警信息。当飞行员解脱这个冲撞告警之后,系统将继续工作在被动模式。
冲撞告警(BA)可以分为两种类型。
(1)冲撞接近告警
当两架编队成员飞机之间的间隔距离达到某个最小阈值距离(例如304.8 m)时,将产生碰撞接近告警;或者当达到最小阈值距离的预留时间小于某个时间阈值(例如30 s)时。
(2)冲撞加速度告警
当与另一架编队成员飞机之间的距离在某个距离(例如304.8 m)以内并且编队飞机之间的相对加速度超过某个阈值(例如2.94 m/s2)时,将产生冲撞加速度告警。
当上述两种类型的冲撞告警出现任何一种时,编队飞机的飞行员应该根据长机的操纵指令采取措施来解脱潜在的编队碰撞威胁。
当系统工作在编队内部监视和防撞模式时,由于在编队内的飞机紧密靠近,因此交通信息(TA)和解脱信息(RA)的功能被禁止。根据接收到的来自长机的主动监视信息和其他飞机广播的ADS-B信息,处于TCAS被动模式的编队飞机也可以探测交通信息(TA)或解脱信息(RA)是否出现,并且通过视觉和听觉的方式为飞行员指示TA和RA。当长机的主动监视功能失效时,如果探测到TA和RA,那么系统会自动或手动地切换到TCAS主动监视模式。冲突一旦解脱,系统立即自动切换回TCAS被动监视模式。
4 结束语
编队飞行防撞是军用飞机需要的重要功能之一,如何实现军用飞机既具有编队防撞的功能又能够与民航飞机装备的TCASⅡ兼容是我国空中交通管制实施过程中迫切需要解决的一个问题。因此,防止军用飞机与民航飞机在空中相撞,辅助飞行安全,开展编队飞行防撞方法和设备的研究是非常必要的。本文给出了利用SSR和ADS-B混合监视技术来实现编队飞行防撞系统的技术方案,通过在编队内使用收发器建立无线通信网络、长机使用TCAS主动监视、编队成员飞机使用TCAS被动监视来提供分布式的编队位置控制,达到实现大型编队飞行防撞的目的。由于国内在这方面的研究工作开展得较少,本文只是给出了一种初步的实现方案,还有很多问题需要深入研究,例如GPS信号中断、长机TCAS主动监视失效、收发器偶然故障等情况的处理,这些问题都有待进一步深入的研究。
[1]U.S.Department of Transportation Federal Aviation Administration.Introduction to TCASⅡversion 7[EB/OL].2002-03 -03.http://www.arinc.com/downloads/tcas/tcas.pdf.
[2]Harrison M J.ADS-X The next gen approach for the next generation air transportation system[C]//Proceedings of the 25th Digital Avionics Systems Conference.OR,Portland:AIAA/IEEE,2006:1-8.
[3]Haissig C M.Military formation flight as a model for increased capacity in civilian airspace[C]//Proceedings of the 23rd Digital Avionics Systems Conference.Saltlake City,USA:AIAA/IEEE,2004:4-9.
[4]RTCA/DO-185A,Minimum operational performance standards for traffic alert and collision avoidance systemsⅡ(TCASⅡ)airborne equipment[S].
[5]RTCA/DO-181A,Minimum operational performance standards for Air Traffic Control Radar Beacon System/Mode Select(ATCRBS/Mode S)airborne equipment[S].
[6]RTCA/DO-260A,Minimum Operational Performance Standards for 1090MHz Extended Squitter Automatic Dependent Surveillance-Broadcast(ADS-B)and Traffic Information Services-Broadcast(TIS-B)[S].
[7]杨荣盛,程擎,罗军.一种ADS-B和多雷达数据融合方案的研究[J].苏州科技学院学报,2009,22(4):58-61.
YANG Rong-sheng,CHENG Qin,LUO Jun.A study on ADS-B and multi-radar data fusion program[J].Journal of Suzhou University of Science and Technology,2009,22(4):58-61.(in Chinese)
[8]张学军,张其善.ATM中的ADS-SSR数据融合的研究
[J].北京航空航天大学学报,2001,27(1):24-27. ZHANG Xue-jun,ZHANG Qi-shan.Data fusion of ADS-SSR in air traffic management[J].Journal of Beijing University of Aeronautics and Astronautics,2001,27(1):24-27.(in Chinese)
PENG Liang-fu was born in Chengdu,Sichuan Province,in 1966. He received the Ph.D.degrees from University of Electronic Science and Technology of China in 1994.His research interests include traffic alert collision avoidance system,signal and information processing.
Email:pengliangfu@126.com
林云松(1969—),男,四川成都人,1999年获博士学位,现为副教授,主要从事机载防撞系统、广播式自动相关监视系统的研究;
LIN Yun-song was born in Chengdu,Sichuan Province,in 1969.He received the Ph.D.degree from University of Electronic Science and Technology of China in 1999.He is now an associate professor.His research concerns traffic alert collision avoidance system,automatic dependent surveillance-broadcast system.
黄勤珍(1965—),女,福建福州人,硕士,教授,主要从事自动控制与计算机应用方面的研究。
HUANG Qin-zhen was born in Fuzhou,Fujian Province,in 1965.She received the M.S.degree from Chongqing University in 1990.She is now a professor.Her research concerns automatic control theory and computer applications.
Scheme Design of a Collision Avoidance System for Formation Flight Based on SSR and ADS-B Hybrid Surveillance
PENG Liang-fu1,LIN Yun-song2,HUANG Qin-zhen1
(1.College of Electrical Information Engineering,Southwest University for Nationalities,Chengdu 610041,China;2.College of Automation,University of Electronic Science and Technology of China,Chengdu 610054,China)
The Traffic Alert and Collision Avoidance System(TCASⅡ)which is widely used in civil aviation is not suitable for formation flight due to the performance limitations of equipment.In order to solve the problem of collision avoidance in formation flight and the product compatibility between collision avoidance system and TCASⅡof civil aviation,a design scheme of collision avoidance system based on Secondary Surveillance Radar(SSR)and ADS-B hybrid surveillance for formation flight is presented.A hybrid surveillance method of active TCAS surveillance and passive TCAS surveillance is used in this design,and the identification and classification of object airplanes is accomplished by using unique 24 bits mode S address.ADS-B data and TCAS surveillance data are fused based on the data fusion algorithm to monitor and track those object airplanes.A large scale formation is split into multiple smaller cells with a cell leader,while a master leader is responsible for maintaining safe separation between these multiple cells.Steering commands generated by the maser leader to maintain separation and avoid collision are transmitted to cell leaders by high speed digital communication link through a transceiver.Individual formation member uses these steering commands to positioning itself with respect to the leader.So the large scale formation to maintain separation and avoid collision can be realized by using centralized control and decentralized execution of multiple aircraft formation cells.The scheme design provides some references and assistance for design and produce collision avoidance system used in formation flight.
collision avoidance for formation flight;traffic alert and collision avoidance system(TCAS);automatic dependent surveillance-broadcast(ADS-B);secondary surveillance radar(SSR);hybrid surveillance
The Science&Technology Pillar Program of Sichuan Province(2011GZ0206);The Natural Science Research Project of Southwest University for Nationalities(10NZD002)
TN95;V241;V243;V249
A
10.3969/j.issn.1001-893x.2012.05.001
彭良福(1966—),男,四川成都人,博士,高级工程师,主要从事机载防撞系统、信号与信息处理的研究;
1001-893X(2012)05-0609-06
2012-01-04;
2012-03-26
四川省科技支撑计划项目(2011GZ0206);西南民族大学自然科学研究项目(10NZD002)
猜你喜欢
西安航空学院学报(2020年5期)2020-12-08
小哥白尼·趣味科学画报(2020年1期)2020-06-09
小哥白尼(趣味科学)(2018年12期)2018-12-18
汽车工程师(2018年1期)2018-07-13
北京航空航天大学学报(2017年3期)2017-11-23
北京航空航天大学学报(2017年10期)2017-04-20
中国公路(2017年13期)2017-02-06
中国设备工程(2016年13期)2016-02-05
民用飞机设计与研究(2015年3期)2015-12-07
海军航空大学学报(2015年4期)2015-02-27
