CTCS-3级列控仿真系统ATP接口平台实时性研究与实现
2012-07-13 08:24车惠军谢俊红
铁路通信信号工程技术 2012年6期
侯 磊 车惠军 张 波 谢俊红
(北京全路通信信号研究设计院有限公司,北京 100073)
1 概述
ATP接口平台是CTCS-3级列控仿真系统的一个重要组成部分。通过ATP接口平台,真实车载ATP实物设备被接入仿真系统,形成半实物仿真,实现在仿真系统环境下,与仿真模型、仿真环境之间的协同运行工作。ATP接口平台一方面将仿真系统模拟的逻辑激励转变为与ATP实物接口完全一致的物理信号,施加于ATP实物;另一方面采集实物信号输出,上传仿真系统。因此,为了实时模拟运行控制,满足ATP实物测试和验证的需求,要求ATP接口平台具备较高的实时性,能够及时传递仿真系统与ATP系统之间的信号。本文将介绍在CTCS-3级列控仿真系统ATP接口平台的设计过程中对实时性的研究与实现方法。
2 ATP接口平台实时性需求分析
2.1 ATP接口平台方案
在半实物仿真系统中,实物接入的原则:保证所有的数据实现闭环。如果物理闭环无法实现,就将此环节的输入输出接入实物接口平台,而将该环节在仿真平台上以虚拟模型的形式存在。
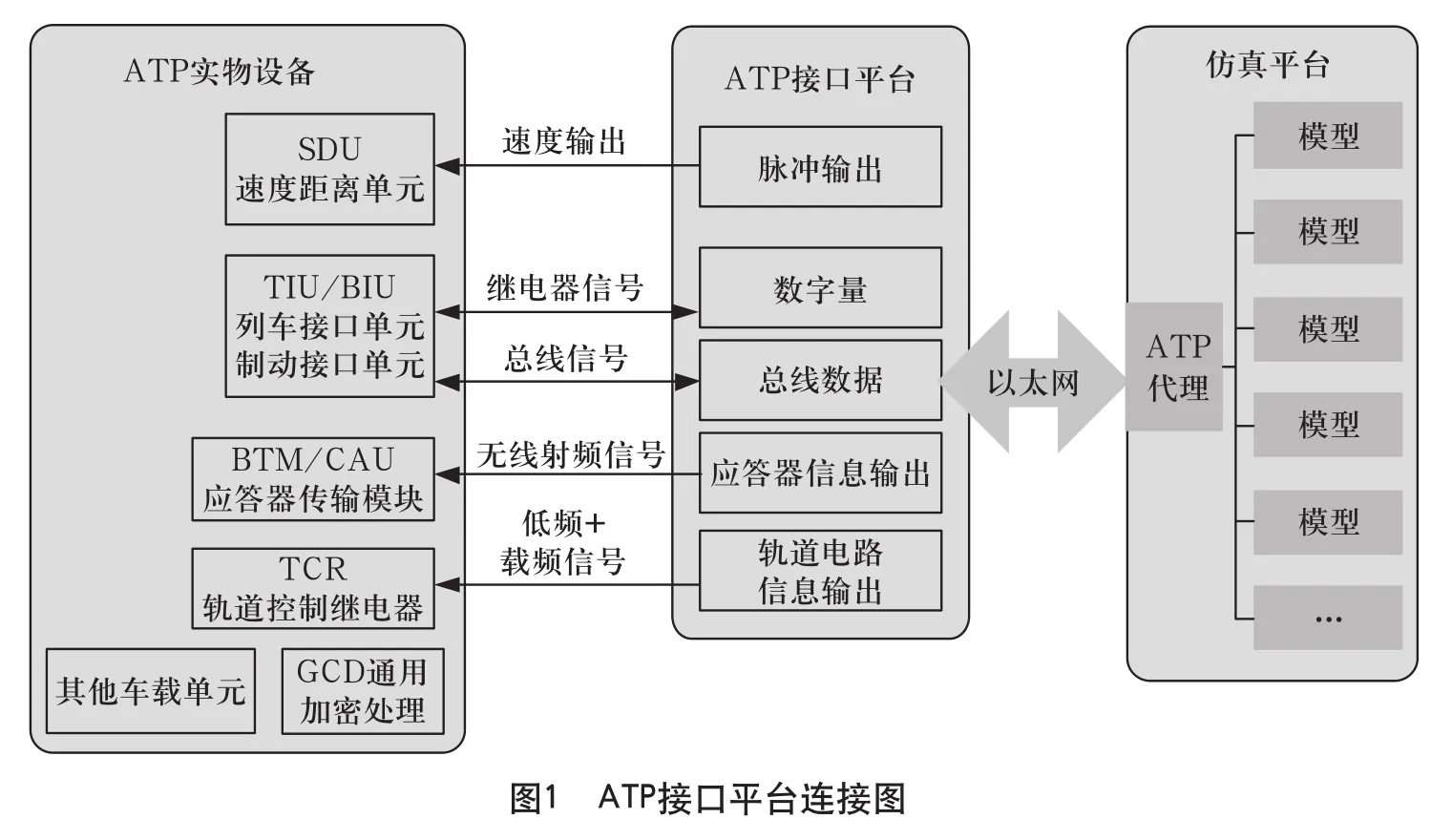
图1是ATP实物通过ATP接口平台接入仿真系统的连接图。ATP接口平台通过以太网接口与仿真平台连接,建立仿真平台与ATP实物设备之间虚拟通道。在CTCS-3级列控仿真系统中,针对庞巴迪ATP, ATP接口平台使用I/O输入输出接口(DI、DO)连接ATP的列车接口单元(TIU)和制动接口单元(BIU);使用脉冲输出接口(PO)连接测速测距单元(SDU);使用RS-232接口驱动轨旁电子单元(LEU),实时写入有源应答器,模拟轨道上不同的无源应答器和有源应答器,通过CAU连接ATP的点式信息接收模块(BTM),或使用RS-232接口实时驱动CAU模拟器(CAUSim),模拟CAU信号,通过BTM,连接ATP的BTM;使用CAN总线接口驱动轨道电路发码盒ZPW-2000A,引出模拟载频信号,连接ATP的连续信息接收模块(STM)。
ATP接口平台硬件以PowerPC微处理器和FPGA为核心,使用微处理器自带通信接口,或通过总线外扩,实现各种所需对外接口,包括以太网接口、I/O接口、PO接口、RS-232接口、CAN总线接口等。
ATP接口平台接入仿真系统的功能流程如图2所示,ATP接口平台与仿真平台通过特定协议通信,传递仿真系统与ATP实物双向的所有信号数据,除了处理通信协议外,接口平台还提供一些管理机制,满足ATP实物接入的一些特殊需求,如系统监控、故障注入、实时性管理等。

2.2 仿真延时分析和实时性需求
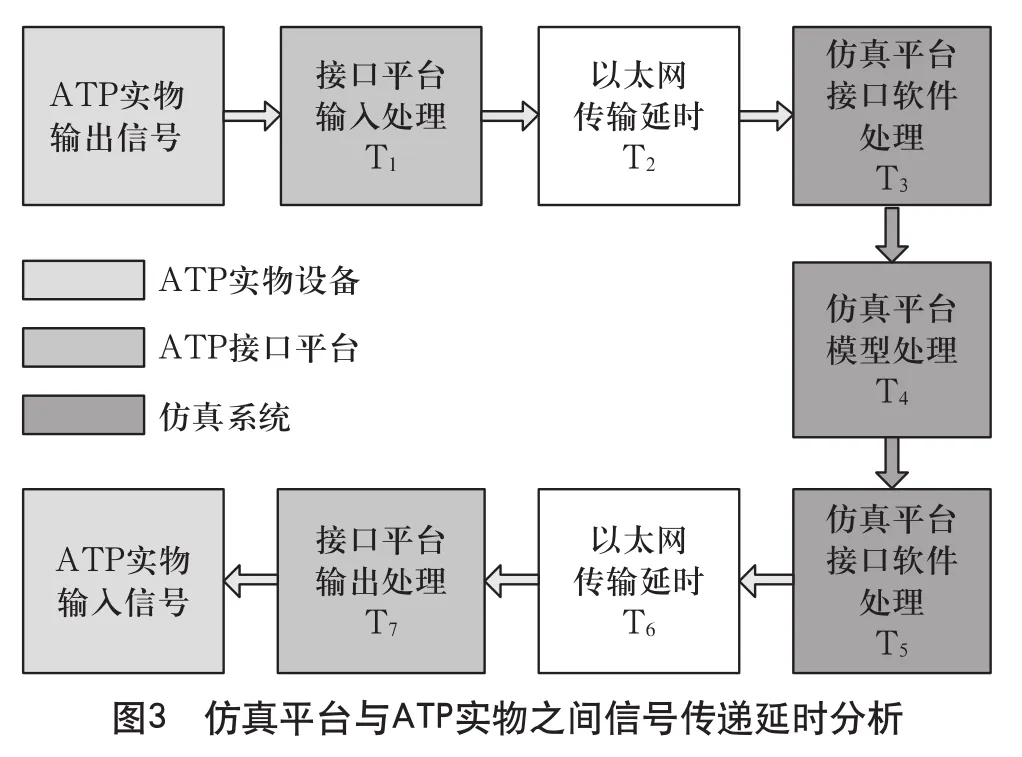
仿真平台通过ATP接口平台间接控制ATP实物,但是接口平台的引入也必将增加两者信号传递的延时,降低仿真系统的实时性。如图3所示为仿真平台通过接口平台,与ATP实物进行信号传递的延时分析图。由图3可得,当仿真系统接收ATP实物输出信号时,信号传递经历4段延时:首先,接口平台探测到ATP输出信号,要经过延时T1,完成信号采集、分析、协议包装的过程后,才能通过以太网发送给仿真平台;其次,数据在以太网中的发送、路由和接收过程中会引入延时T2;当数据被仿真平台通信处理软件接收后,需要经历协议解析、分析和反馈的过程,引入延时T3;最终数据被送到仿真平台的模型,模型处理过程中仍存在延时T4。当仿真系统向ATP实物输出信号时,同样会经历类似的4段延时,在此不一一阐述。
为了充分真实地模拟现场场景,满足实物测试和验证的需求,要求尽量减少仿真系统中各段延时。在实际设计中,以太网通信通过交换机和路由配置,优化网络拓扑,减少以太网传输过程中的延时;仿真平台模型和通信软件设计中,通过使用更高性能服务器和优化软件架构的方法减少延时。接口平台是仿真系统的重要一环,为了减少接口平台带来的延时,要求接口平台具备较高实时性,此外,还需要针对有特别需求的信号传递,进行特别处理。
ATP接口平台针对ATP的TIU单元、BIU单元、SDU单元和STM单元的数据输入或输出,均是简单的信号传递,通过提高接口平台的实时性,可以减小这些信号传递过程中的延时,优化仿真效果。而对于BTM接口的应答器报文传递,除了提高接口平台的实时性,还需要采用特定机制,精确应答器报文传递的时机。
3 平台实时性设计
3.1 平台内部延时分析
ATP接口平台传递信号时引入的延时,可以进一步细化,如图4所示。信号从仿真平台向ATP实物传递或反向传递产生的延时,均可在接口平台内部细化为4段。以仿真平台向ATP实物传递信号为例,以太网接口接收数据的过程包括网卡芯片接收物理信号、以太网接收中断响应和微处理器读取网卡芯片数据,存在延时t1;以太网数据等待任务进程处理,存在任务切换延时t2;任务进程对以太网数据进行解包、分析和反馈,产生延时t3;最后数据通过特定接口输出至ATP实物接口,也需要延时t4。

以太网数据收发时产生的延时t1和t8由以太网波特率和微处理器处理能力决定,ATP接口平台与交换机之间使用100 Mbit/s以太网,因此延时主要由微处理器处理能力决定;任务处理延时t3和t7由待处理的任务量和微处理器处理能力确定,在待处理任务确定的情况下,延时主要由微处理器处理能力决定;ATP接口输入输出产生的延时t4和t5主要由接口类型决定,接口平台驱动的接口都已确定,延时t4和t5固定;任务切换延时t3和t7主要由接口平台所选用的操作系统决定,不同操作系统的任务切换延时差别很大。
ATP接口平台以Freescale公司PowerPC微处理器MPC5200B为核心,MPC5200B的处理能力可达885 MIPS(百万条指令/秒),而且拥有丰富外设接口,用于ATP接口平台设计,功能足够强大。根据上述分析,当选定平台核心处理器,确定工作任务之后,ATP接口平台内部延时主要由选用的操作系统决定,为了减小接口平台在整个仿真系统中带来的延时,需要选择合适的实时操作系统,以提高平台的实时性能。
3.2 操作系统选择
目前主流的实时操作系统主要包括uC/OS,eCOS,Vxworks,以及实时Linux(包括RTlinux、Xenomai等 )。
uC/OS和eCOS是内核相对简洁的实时操作系统,任务调度机制相对于Vxworks和实时Linux较为简单,可以提供很好的实时性。但是uC/OS和eCOS对TCP/IP协议栈、文件系统的支持不够完备,往往需要第三方代码的支持,增加了开发和维护的难度。Vxworks不公开源代码,如果使用Vxworks,需要与风河公司(Windriver)合作,由其进行内核移植和底层开发,不利于接口平台的后续调整与扩展。
实时Linux是在通用Linux操作系统的基础上,通过添加实时内核补丁的方式,满足开发者实时性的需求。相对于Linux操作系统,实时Linux的实时性得到了大幅提高。此外,实时Linux保留Linux操作系统对TCP/IP协议栈、文件系统等的支持,应用代码开发与Linux下几乎完全兼容。并且实时Linux为开放源代码,方便接口平台的后续调整与扩展。
综合考虑,ATP接口平台选用实时Linux操作系统Xenomai作为应用软件开发的平台。
4 事件调度机制
4.1 机制设计背景
应答器报文激活是ATP接口平台需要进行特殊处理的接口任务。
ATP设备通过BTM接收轨旁应答器报文数据,应答器报文为ATP提供多种信息,包括线路信息、公里标等。ATP使用应答器定位当前位置,并由SDU根据采集到的速度脉冲信号,不断刷新位置信息。当列车到达下一个应答器处时,ATP设备接收应答器报文,并判断接收位置是否与预期位置相符。如果接收位置与预期位置在一定误差范围内,ATP认为接收成功;否则,认为应答器报文接收错误。接收位置与预期位置的误差范围一般为十米量级,在CTCS-3级列控系统中,如果列车以最高速度350 km/h运行,相当于列车100 ms内的位移,因此要求在仿真系统中,应答器报文激活的时间精度须低于100 ms。
在仿真系统中,仿真平台模型的运行环境为非实时系统服务器,而且以太网并不是硬实时的通信网络,因此总体来看,仿真系统的实时性为软实时,无法保证每次应答器报文激活的时间精度必然低于100 ms。
为了保证应答器报文激活精度,提出事件调度机制。事件调度机制主要依赖于“仿真时间同步”和“事件调度”两个概念。“仿真时间”是虚拟仿真系统的时间,在物理上,是仿真服务器的本地时间,“仿真时间同步”是为了实现子系统与“仿真时间”同步而进行的时钟同步措施;“事件”是改变对象状态的一次动作,每个事件包含一个仿真时间戳及完成该事件对应的方法指针,在应答器报文激活的过程中,一次应答器报文激活即是一次“事件”。“事件调度”就是对仿真系统中产生的事件按仿真时间的先后进行排序,然后按顺序触发。
4.2 事件调度
针对应答器报文激活,事件调度具体实现如下:仿真系统为ATP接口平台提供添加仿真时间戳的信息包,包括列车速度、加速度、位置等,用于计算应答器报文激活时刻,ATP接口平台收到所有信息包之后,根据不同时刻的列车速度、加速度、位置等信息,和下一个应答器的位置,计算激活应答器报文的仿真时间,并按时激活。
4.3 仿真时间同步
为了使ATP接口平台能够按照仿真时间进行“事件调度”,需要进行仿真时间同步。
ATP检查报文位置误差时,实际上是比较两个应答器之间的额定距离(应答器报文指示的两个应答器之间的距离)与接收距离(实际接收到两次应答器报文时的位置之差)之间的差距,两个应答器之间的额定距离是固定的,根据仿真系统的列车动力学模型的设计原则,如果应答器报文激活严格按照动力学模型的仿真进行,接收距离应与额定距离一致,实际上之所以产生误差,主要原因在于单次应答器报文激活时机的时间精度不高,导致ATP接口平台两次应答器报文激活之间的时间间隔差过大,产生接收距离误差。
根据上述分析,接口平台与仿真系统之间的时间同步,重点不是时间精确一致,而是两者时间进度一致,以保证两次应答器报文激活之间的时间间隔比较精确。
4.4 机制总结
采用事件调度机制进行激活应答器报文操作,应答器报文激活的时间误差主要由ATP接口平台内部操作系统任务切换延时和“单次调整最大值”决定,通过调整同步间隔,可以将应答器报文激活的精度控制在10 ms量级,满足应答器报文激活的实时性需求。
5 总结
本文详细分析在CTCS-3级列控仿真系统中ATP实物设备接入仿真平台面临的实时性问题,并对ATP接口平台的实时性进行详细研究与分析,针对ATP接口平台实时性设计中的关键问题给出解决方案。本文提出的实时性解决方案不局限于CTCS-3级列控仿真系统中的ATP接口平台,对其他实物设备接入仿真系统也有一定借鉴意义。
[1] ERTMS/ETCS System Requiems Specification [S].
[2] ERTMS ETCS functional requirement specification [S].
猜你喜欢
装备制造技术(2020年1期)2020-12-25
铁道通信信号(2020年9期)2020-02-06
北京航空航天大学学报(2017年12期)2017-04-23
电子制作(2017年24期)2017-02-02
电子制作(2017年19期)2017-02-02
电子技术与软件工程(2016年22期)2016-12-26
铁道通信信号(2016年4期)2016-06-01
中国交通信息化(2015年11期)2015-06-06
中国交通信息化(2014年12期)2014-06-05
铁路通信信号工程技术(2014年5期)2014-02-28