
平均电流模式控制的单线并联均流DC-DC变换器研究
2012-07-18 02:14夏光滨赵冬玉赵伟东
通信电源技术 2012年3期
夏光滨,赵冬玉,于 斌,赵伟东
(中国人民解放军91550部队15分队,辽宁 大连116023)
0 引 言
随着计算机和通讯技术的飞速发展,对直流电源的要求也越来越高,要求其在保证高效、稳定的前提下,输出电流要能够达到几百安培。为了满足这种需求,通常采用多模块并联均流技术。并联均流技术能够减小开关器件的应力,提高系统的效率和可靠性[1]。在实际应用中,当负载发生瞬变或某个模块发生故障切除时,经常会触发一些不必要的报警。在负载瞬态变化过程中,输出电流在各个模块分配不均,当输出电流超过额定值,保护电路会限制输出电流。为了避免这些不利情况的出现,可以采用电流控制模式代替传统的电压控制模式。
1 电流模式控制的单线并联均流的工作原理
采用电流模式控制的单线并联均流法的单模块电路如图1所示。当单模块工作时,因为均流放大器的输入阻抗很高,没有电流流过电阻Rs,模块的输出电流信号与均流母线相等。因此,均流误差信号为0,控制相当于双环结构。当多模块并联时,均流电阻Rs的值相同,所以均流母线传递平均电流参考信号。均流母线电流与单模块电感电流的均流误差信号经均流放大器Us放大,作为电流放大器Uc的指令,通过PWM发生器调节电感电流。当输出电流低于电流指令时,电流放大器Uc的输出误差信号增大,增加PWM发生器的输出占空比,从而使电感电流增大。在稳态时,每个并联模块的输出电流都等于均流母线电流,从而达到均流的目的。

图1 电流模式控制的原理框图
2 电流模式控制的均流小信号建模分析
均流电阻和均流母线的电路如图2所示。对于n个并联模块,UI1…UIn为电流传感器输出的瞬时电压信号,UIbus为均流母线的瞬时电压信号。
如果均流电阻Rs1…Rs2相等,则

用小信号描述,

若电流传感器的传递函数为H,则


图2 均流电阻、母线间框图
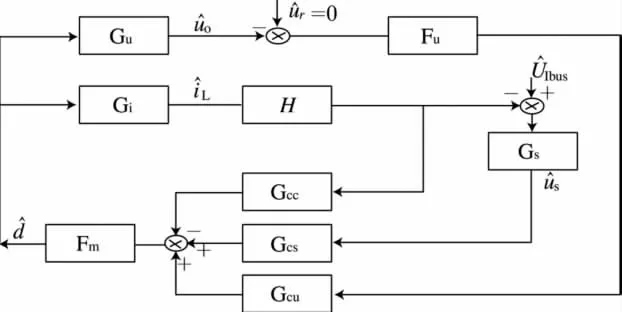
图3 控制电路的小信号框图
忽略输入电压的扰动,其中一个并联模块的控制框图如图3所示。由图3可知,电流模式控制的单线均流法原理图中包含三个控制环:即电流环、电压环和均流环。对简化电路模型控制环的分析 ,有利于掌握均流控制器的设计规则。
Fu:电压反馈的传递函数;H:电流到电压信号的传递函数;Fm:脉宽调制的传递函数;Gu:占空比到输出电压的传递函数;Gi:占空比到电感电流的传递函数;Gs:均流放大器的传递函数;Gcc:电流环的电流放大器的传递函数;Gcs:均流环的电流放大器的传递函数;Gcu:电压环的电流放大器的传递函数;、和分别为输出电压、电感电流和占空比的扰动量。
在图3中,如果模块n有一个均流扰动量,则注入控制器中的均流误差信号为,


其它模块电感电流的扰动量无法在模块n形成局部反馈环,式(5)中的第二项可以被视为在考虑模块间的相互影响时的外部干扰。所以
T1和T2可以通过实验或数学计算得到[2]。
(3)为了获得电流模式控制的优势,电流环的穿越频率要高于电压环的穿越频率。电流环的高带宽能够改善多环控制的闭环响应。
(4)在整体环增益中为了避免下倾效应(其导致系统不稳定)。当两个环相交时,不要把两环的相位放在相反的方向上。例如,|TI|=|TU|,TI(-90°)和TU(-270°)不能发生在同一频率处,两环相减产生下倾从而引起系统的不稳定。

可以从图3中得出开关增益—电压环Tu,均流环Ts和电流环Ti。

3 电流模式控制的单线均流控制系统设计
根据以上分析,采用三环控制法设计控制器应该注意以下几点:
(1)对于平均电流模式的控制,电流误差放大器Uc的第二个极点应该放在开关频率一半之后。Uc的零点至少放在开关频率一半的十分之一之前。外部的斜坡设置应与电压模式相似,选择Uc的增益在开关频率一半处,对谐振峰值有适当的阻尼 ,同时又具有一定的带宽和闭环调节速度。
(2)设计必须基于多模块的情况进行,因为其整体环增益要高于单模块的情况。为了判别系统的稳定性,闭环增益包括整体环增益T和外部环增益。1


图4 电流模式控制的单线均流控制系统设计电路图
(5)为了简化设计,均流放大器Us的控制通常采用比例控制[3]。在保证模块稳定的情况下,均流放大器的增益Gs尽可能的高,均流精度由Gs的比例控制决定。
下面以移相全桥PWM ZVS变换器并联为例来说明控制系统的设计,完整的单模块电路如图4所示。电路参数如下:
输入电压:400 V;输出电压:48 V;额定输出电流:20 A;开关频率fs:100 kHz;高频变压器副边对原边的变比n:3:18;谐振电感Llk:4μH;隔直电容Cb:3.3μF;输出滤波电感Lf:100μH;输出滤波电容Cf:30μF;电流传感器H 的传输比4 V/100 A;脉宽调制的传递函数Fm:0.25;Fu=Ruf/Ru1≈1;Gs=10;负载电阻Ro:2.4Ω。
根据文献[5]可知移相全桥PWM变换器的小信号模型

式中,Rd=4n2Llkfs。
电流放大器的传递函数

式中,

开关频率的一半为50 kHz,误差放大器的第二个极点放在160 kHz处,零点放在500 Hz处。放大器的增益要保证电流环有足够的带宽,并且系统稳定。通过调节电阻Rii的值来改变电流环的增益,调节Riu和Gs改变均流环和电压环的增益。
4 仿真分析
未加均流环和加均流环的输出电流的瞬态响应波形如图5和图6所示。图5,未加均流环,在负载发生瞬态变化时,电感电流没有给滤波电容充电,所以两模块不能实现均流;图6,加入均流环,在负载发生瞬态变化时,电感电流给滤波电容充电,所以两模块不管是在瞬态还是在稳态条件下,都能够实现均流。

图5 两模块未加均流环,并联输出电流从轻载(Ro=480Ω)到满载(Ro=2.4Ω)瞬态响应波形

图6 两模块加均流环,并联输出电流从轻载(Ro=480Ω)到满载(Ro=2.4Ω)瞬态响应波形
5 结 论
本文所提出的电流模式控制的单线并联均流方法在负载瞬态响应过程中,响应速度快,能够减小负载电流在并联模块间的分配不均衡问题,避免过电流情况的出现,既保证了系统的动态均流性能,又保证了稳态均流性能。同传统的电压模式控制均流方法相比,该方法具有更好的性能。
[1] Thorsell L,Lindman P .Reliability Analysis of a Direct Parallel Connected n+l Redundant Power System Based on High Reliable DC-DC Modules[C].IEEE INTERLEC,1988:511-516.
[2] Ridley R B.Small-Signal Analysis of Parallel Power Converters[Z].M.S.Thesis,VPI&SU,1986.
[3] Ninomiya T,Wu R H ,Kodera Y,Kohama T,Ihara F.Novel Control Strategy for Parallel Operation of Power Supply Modules[C].IEEE PCC-Yokohama,1993:159-164.
[4] Choi B,Cho B H,Lee F C.Three-Loop Control for Multi-module Converter Systems[J].IEEE Trans.Power Electronics,8(4):78-83.
[5] Vlatkovic V ,Sabate J A,Ridley R B,Lee F C,Cho B H.Small-Signal Analysis of the Phase-Shifted PWM Converter[J].IEEE Trans.Power Electronics,1992,7(1):128-135.
猜你喜欢
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
中学生数理化·中考版(2021年10期)2021-11-22
水泥工程(2020年4期)2020-12-18
防爆电机(2020年3期)2020-11-06
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
中国光学(2015年5期)2015-12-09
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
