
饱和不确定磁流变阻尼器悬架系统反馈控制器的设计*
2012-07-19 02:01岳永恒
汽车工程 2012年7期
岳永恒,王 茂,赵 强
(1.哈尔滨工业大学航天学院,哈尔滨 150080;2.东北林业大学交通学院,哈尔滨 150040)
前言
为改善汽车悬架系统的减振效果,提高车辆行驶的平顺性和舒适性,磁流变阻尼器(magneto-rheological damping,MRD)悬架系统成为国内外研究的热点[1-7]。MRD 的数学模型为文献[8]和文献[9]中提出的修正Bouc-Wen模型,但其强非线性增加了控制器的设计难度。因此常采用智能控制算法如自适应控制、神经网络控制等[4-6]对MRD进行研究。智能控制算法在理论上能够满足系统稳定性要求,然而由于算法收敛速度慢、系统响应时间长等缺点,限制了MRD产品在实际中的应用。
磁流变阻尼器的强非线性主要表现为饱和特性、磁回滞特性和双线性3个方面。磁回路封闭曲线面积狭小且线性部分较为接近,因此饱和特性是MRD的主要特性。应用饱和特性可简化传统MRD的Bouc-Wen模型,便于控制器的设计。近10年来,饱和输入问题的研究取得了可喜的成果[10-13],为研究MRD控制系统稳定性提供了有力的技术支持。
本文中以饱和模型替代传统的Bouc-Wen模型,研究了悬架系统磁流变阻尼器的减振效果。
1 MRD悬架系统模型
MRD模型的强非线性主要表现在饱和特性、磁回滞特性和双线性上,见图1。
根据MRD的物理特性曲线而建立的Bouc-Wen数学模型为
模型中数学符号的具体含义见文献[1]和文献[2]。对于如此复杂的数学模型,很难建立有效的实时控制系统。此外,文献[6]中对MRD非线性物理特性实验数据的分析表明,饱和特性为MRD的主要物理特性。依据文献[4]~文献[7]的研究策略,令MRD的Bouc-wen模型简化为饱和模型,设计MRD悬架系统闭环反馈控制器。
应用LORD公司RD1005-3型MRD设计减振实验台来研究半主动悬架系统MRD的减振效果。RD1005-3型MRD最大输出阻尼力为4 000N,而介于±4000N之间的输出阻尼力近似为线性。因此,用分段函数表示RD1005-3饱和特性:
根据汽车悬架系统的工作原理而设计的MRD减振实验台如图2所示。
用变频器驱动电机带动凸轮轴工作,产生正弦激励信号模拟路面谱系,通过控制MRD,观测“悬架系统”对正弦激励信号的衰减程度。因此,要求实验台控制系统具有闭环稳定性。
MRD减振实验台大部分零部件质量和相关参数可精确测量。因其自身非线性物理特性的影响,使MRD的刚度在运动过程中为时变参数,可通过实验测量MRD刚度的上下界值。当实验台工作时,MRD相关参数将包含于有界闭区间内。因此MRD减振实验台是一类典型的参数依赖不确定性系统,应用凸包技术可有效解决参数的不确性问题[14]。
MRD减振实验台的动力学模型如图3所示。图中:m1、K1和C1为1/4悬架系统的质量、刚度和阻尼;m2、K2和C2为1/4轿车车身的质量、刚度和阻尼;m3、K3和C3为驾驶员座椅的质量、刚度和阻尼;z1、z2和 z3分别是m1、m2和 m3的对应质量块位移;F为可控磁流变阻尼力;Sat(w)为参数z0的饱和扰动输入;z0为路面对悬架系统的位移激励。建立MRD悬架系统的动力学状态方程[1-2]:
式中:A为系统矩阵;B为输入矩阵;Bw为扰动输入矩阵;x(t)为系统状态变量;w为地面谱系扰动输入;F为控制对象输入量,即可控磁流变阻尼力。
2 MRD悬架系统稳定性分析
通过实验测量MRD悬架系统中相关的参数值,如表1所示。
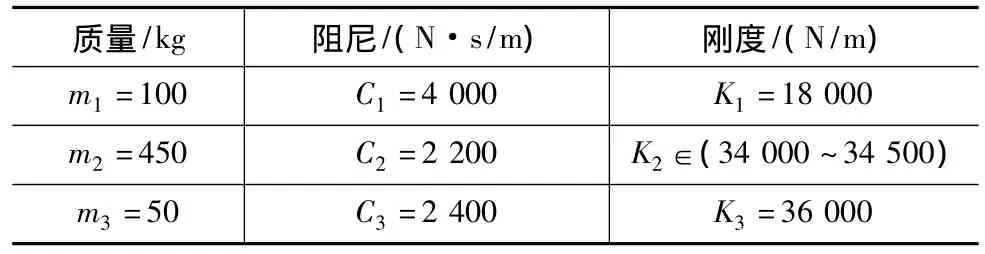
表1 MRD悬架系统相关参数值
MRD悬架系统中参数K2为时变参数且有界,因此系统矩阵 A为时变参数矩阵:A(K2)∈[A1,A2],A1=A(K2min),A2=A(K2max)。系统的稳定性与外界输入无关,令扰动输入为零(w=0),则式(2)改写为
式中:Ai、B表示MRD悬架系统为时变参数K2的顶点矩阵,因此不确定系统(式(3))包含于由“2”个顶点所构成的有界凸多面体区域内。
反馈控制律为
式中:K∈R1×6为反馈控制矩阵。
2.1 预备知识和饱和输入处理方法
对于给定矩阵K∈R1×6。因为矩阵K为单行矩阵,因此可根据文献[10]~文献[13],定义凸多面体区域为
式中Fsup和Finf分别表示可控磁流变阻尼力上下界,如果F=Kx(t)不在饱和区内时,饱和函数Sat(·)将其输入量强制等于 -min(|Fsup|,|Finf|)或min(|Fsup|,|Finf|),且 x(t)∈L(K)。为便于分析,将式(5)转化为标准饱和函数:
定义包含x(t)的子空间:
式中:P=PT>0,P∈R6×6,ρ∈R。ε(P,ρ)为椭球体。
则表示椭球体ε(P,ρ)包含于对称凸多面体L(K)内。
根据文献[12]中的引理2,文中可控磁流变阻尼力饱和项可表示为
式中:H∈R1×6为反馈附加矩阵;Dj矩阵等于“0”或“1”;而称为Dj的补矩阵,即=1-Dj;
引理1(Schur补引理)对于给定的对称矩阵,其中 S11∈Rr×r,以下 3 个条件是等价的
根据式(9),MRD悬架闭环控制系统可表示为
通过式(9)把式(3)具有饱和不确定性系统转化为式(10)线性系统,进而可通过矩阵不等式技术处理MRD悬架系统的稳定性。
2.2 控制器设计和吸引分析
定义Lyapunov函数:v(t)=xT(t)Px(t),PT=P>0。根据Lyapunov函数稳定性理论要求:
将式(10)带入式(11)得
式(12)成立的充分必要条件是:
若吸引域由ε(P,ρ)表示,则存在一个微小的椭球体与ε(P,ρ)在结构上保持一致,称该微小椭球体为吸引域的形状参考集[15-16]。
给定参考向量 xR∈R6×1,θ⊂R6×1为状态空间。
显然式(14)表示xR空间被压缩α倍。因此,αxR⊂ε(P,ρ)。当 α 取得最大值时,形状参考集将接近最大吸引域。
MRD悬架系统反馈控制器和最大吸引域,可通过求取下列矩阵不等式最优解获得
形状参考集属于吸引域,即:αxR⊂ε(P,ρ)。可知α2xP/(ρxR)≤1,根据引理1可得
当α2逐渐增大,则形状参考集将逐步接近最大吸引域。令 β =1/α2,式(16)转化为
对式(15)第2个不等式约束条件两边同乘以P-1,并乘以 ρ 得:
根据式(6)可知L(H)可表示为
式(15)中第3 个约束条件 ε(P,ρ)⊂L(H),可等价地表示为
根据引理1,式(20)可转化为
为求最大吸引域和MRD控制系统闭环反馈控制器,可用LMI求解式(17)、式(18)和式(21)约束条件最优解β,进而可求解出反馈控制器和最大吸引域。
3 数值仿真
根据表1可知MRD的刚度为时变参数且有界,则饱和不确定MRD悬架系统的顶点矩阵为
式(18)中D1=0,D2=1。令式(17)、式(18)和式(21)中Q=(P/ρ)-1,式(18)中Z=HQ,Y=FQ,根据文献[15]~文献[17],选取形状参考集为
其中ϑi∈[0,2π],为寻找最大吸引域,选取步长为0.05π,使其ϑi从0到2π遍历,可得到最优解。通过Matlab解式(22)LMI优化问题得
闭环控制系统的吸引域,可由代数方程描述为
对于任意系统状态变量满足式(23),则表示系统状态变量位于吸引域中。MRD悬架闭环控制系统在吸引域内具有局部指数稳定。
MRD控制系统的数值仿真如下。
在参数矩阵凸空间中任取一点,系统时变参数矩阵可被描述为
MRD悬架系统开环数值仿真结果如图4所示,相当于传统的被动悬架减振系统。系统状态变量x1、x2和x3在系统稳定时收敛到“0”点(对应质量块的速度);系统状态变量x4、x5和x6分别是模型对应质量块的位移,在系统稳定时因重力影响收敛到0.2附近,符合实际系统为惯性系统的特点。
闭环系统数值仿真结果如图5所示,6个状态变量全部稳定收敛到0.2,闭环系统的超调量和协调时间都明显优于开环系统。
数值仿真结果表明,MRD悬架系统减振效果明显优于传统悬架系统,证明了该算法的有效性。
4 结论
MRD的优良物理特性可提高汽车的行驶平顺性和舒适性,但其强非线性限制了MRD在实际工程中的应用。本文中提出的饱和模型弱化了Bouc-Wen模型的强非线性,同时通过凸包技术将饱和非线性模型线性化,依据Lyapunov函数稳定性理论分析了MRD悬架系统的稳定性,设计出的反馈控制器同时获得了最大吸引域。数值仿真结果表明,MRD悬架系统减振效果明显优于传统悬架系统。
[1]王洋.汽车悬架磁流变阻尼器设计与优化研究[D].哈尔滨:东北林业大学,2011.
[2]赵强,杨亚珣.基于带死区PID控制的车辆磁流变座椅悬架的仿真[J].东北林业学报,2009,37(6):109 -111.
[3]Cecilia Cornejo,Luis Alvarez-Icaza.Vibration Control of a Building with Magneto-rheological-dampers Based on Interconnection and Damping Assignment[C].Proceedings of the 45th IEEE Conference on Decision & Control.San Diego:USA,2006:13-15.
[4]Li Rui,Chen W M,Yu Miao,et al.Fuzzy Intelligent Control of Automotive Vibration via Magneto-rheological Damper[C].Proceedings of the 2004 IEEE Conference on Cybernetics and Intelligent Systems.Singapore,2004:1 -3.
[5]Wang Hao,Shi Xiaomei.Semi-Active Suspension Control Using the RNN Inverse System of MR Damper[J].Intelligent Systems and Applications,2010(5):85 -91.
[6]Liu Wei,Shi Wen-ku,Liu Da-Wei,et al.Experimental Modeling of Magneto-rheological Damper and PID Neural Network Controller Design[C].2010 Sixth International Conference on Natural Computation,Yantai.Yantai University Press,2010:10 -12.
[7]Zhao Y Z,Sun W C,Gao H J.Robust Control Synthesis for Seat Suspension Systems with Actuator Saturation and Time-varying Input Delay[J].Journal of Sound and Vibration,2010,329(8):4335-4353.
[8]Spencer B F,Dyke S J,Sian M K,et al.Phenomenological Model of a Magneto Rheological Damper[J].ASCE Journal of Engineering Mechanics,1996,3(1):978 -982.
[9]Robinson R,Hu W,Wereley N M.Linking Porosity and Tortuosity to the Performance of a Magneto-Rheological Damper Employing a Valve Filled with Porous Media[J].IEEE Transactions on Magnetics,2010,7(6):2156 -2159.
[10]Du Haiping.Actuator Saturation Control of Uncertain Structures with Input Time Delay[J].Journal of Sound and Vibration,2011,330(12):4399 -4412.
[11]Zhou Bin.Stability and Stabilization of Discrete-time Periodic Linear Systems with Actuator Saturation[J].Automatica,2011,47(8):1813-1820.
[12]Hu Tingshu,Lin Zongli,Chen Ben M.Analysis and Design for Discrete-time Linear Systems Subject to Actuator Saturation[J].Systems & Control Letters,2001,45(7):97 -112.
[13]Cao Yongyan,Lin Zongli.Stability Analysis of Discrete Time Systems with Actuator Saturation by a Saturation Dependent Lyapunov Function[C].Proceeding of the 41stIEEE Conference on Decision and Control.Nerada USA,2002,12:4140 -4145.
[14]高会军.基于参数依赖Lyapunov函数的不确定动态系统的分析与综合[D].哈尔滨:哈尔滨工业大学,2005.
[15]Yu J Y,Xie G M,Wang L.Robust Stabilization of Discrete Time Switched Uncertain Systems Subject to Actuator Saturation[C].American Control Conference.New York:USA,2007:9 -13.
[16]Hu T,Lin Z,Chen B M.An Analysis and Design Method for Linear Systems Subject to Actuator Saturation and Disturbance[J].Automatica,2002,38(2):351 -359.
[17]Cao Y Y,Lin Z.Stability Analysis of Discrete-time Systems with Actuator Saturation by a Saturation Dependent Lyapunov Function[J].Automatica,2003,39(7):1235 -1241.
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
茶道(2022年3期)2022-04-27
北京汽车(2021年5期)2021-11-10
现代畜牧科技(2021年4期)2021-07-21
电子技术与软件工程(2021年10期)2021-07-05
时代汽车(2021年1期)2021-03-03
北京理工大学学报(2020年11期)2020-12-15
流行色(2020年9期)2020-07-16
CHIP新电脑(2017年6期)2017-06-19
北京汽车(2016年6期)2016-10-13
