DGPS与UWB混合精确无缝定位技术研究*
2012-07-25 05:36邬春明
传感器与微系统 2012年3期
邬春明,耿 强,刘 杰,范 睿
(东北电力大学信息工程学院,吉林吉林 132012)
0 引言
近年来,无线定位技术的发展与应用遍布全球。WiFi,Zig Bee,蓝牙,GPS和 UWB 等[1]新兴的无线定位技术,在办公室、家庭、工厂、公园等大众生活的方方面面得到了广泛应用,并具有广阔的发展前景。然而,WiFi,Zig Bee,UWB等室内定位技术的定位范围有限,而GPS室外定位技术由于信号的遮挡而严重影响定位效果,甚至不能定位。蜂窝无线定位和GPRS定位虽能同时适用于室内外,但其定位精度不够高。在许多具体应用中,往往需要对目标进行室内外无缝精确定位,这就需要一个很好的解决办法。文献[2]提出INS和GSM混合定位,文献[3]提出利用2种滤波器进行数据融合的DGPS和WUB结合定位算法等,但GPS和GSM混合定位精度有待提高,而文献[3]精确定位范围有限,因此,都有一定的局限性。
本文将UWB和 DGPS两种定位方法相结合,利用GPRS信号作为GPS和传感器传输数据的载体,利用Kalman滤波器来消除UWB的NLOS误差,并使用粒子滤波器对DGPS和UWB数据进行融合,使定位精度在室内达到cm级,室外达到较小的 dm级。使用 Kalman滤波器对UWB数据进行滤波后,比单纯使用粒子滤波器进行数据融合和滤波的定位精度有较明显提高,能够达到无缝精确定位的效果。
1 系统设计与实现
对于室内外无缝定位系统而言,室外将使用DGPS定位方法,室内使用UWB定位方法。但在室内外交接的复杂环境下,UWB信号会由于非视距误差导致定位精度下降,而DGPS信号由于多径效应和信号遮挡,定位精度也会下降。本系统通过使用滤波器融合UWB定位数据与DGPS定位数据,达到提高定位精度的目的。为了验证滤波器的效果,设计了一个基于UWB和DGPS的定位系统,系统组成如图1所示。
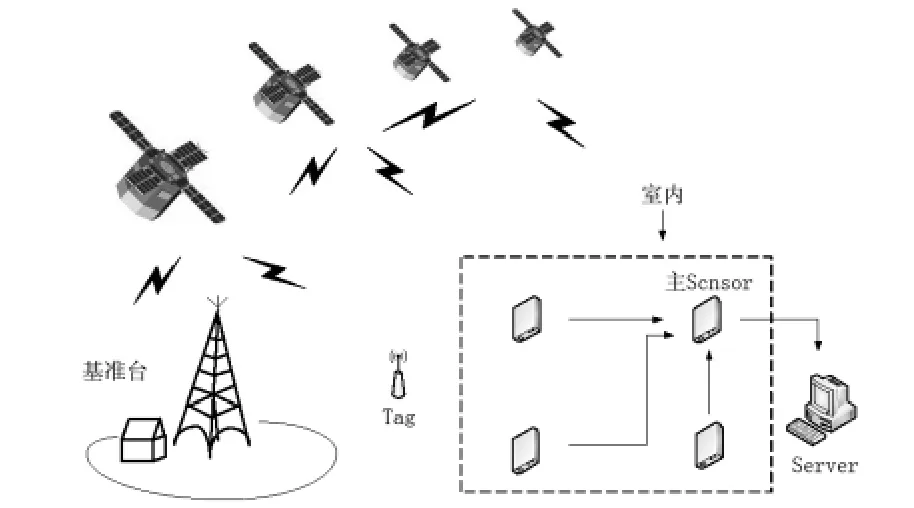
图1 定位系统组成图Fig 1 Composition diagram of positioning system
图中,Tag为融合了UWB发射器,GPS接收器与GPRS通信模块的混合体,其硬件结构如图2所示。
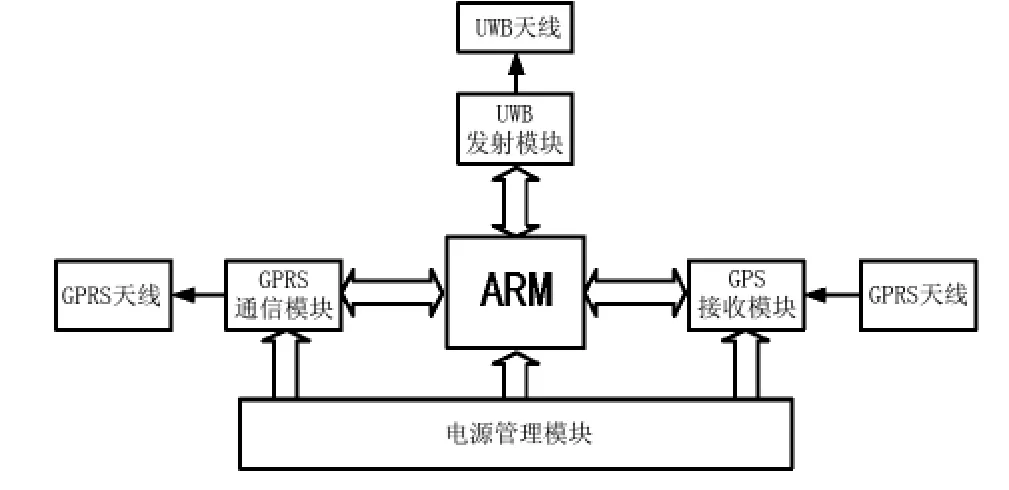
图2 Tag终端结构图Fig 2 Terminal structure diagram of Tag
Tag将UWB脉冲发送至Sensor,并将接收到的GPS(基准站把修正误差数据传送至Tag,Tag对接收到的GPS数据进行修正)数据通过GPRS无线通信模块发送至主Sensor,主Sensor负责对接收到的UWB数据进行位置解析和计算,并接收GPS位置数据,最后将位置数据传至Server端。其他Sensor与主Sensor之间,主 Sensor与 Server端之间也利用GPRS通信模块进行数据传输。系统工作流程如下:
1)确定其他Sensor到主Sensor的时间差;
2)其他Sensor接收到Tag发出的UWB脉冲信号后,将接收到信号的时刻发送至主Sensor,主Sensor对时间信息利用滤波器进行处理,并进行时间补偿后,再利用到达时间差(time difference of arrival,TDoA)[4]的方法解析计算 Tag的位置;
3)将通过UWB定位得到的Tag位置信息与获得的GPS位置信息(如有位置信息的话)传送至Server端;
4)Server端主要负责将GPS使用的WGS—84坐标转换为与UWB定位坐标统一的大地坐标,以及通过滤波器实现数据融合,最终确定位置信息。
2 UWB和DGPS混合定位原理
通常情况下,UWB信号的脉冲宽度在0.2~1.5 ns,持续时间短,占空比低,空间距离偏差为6~45 cm。不考虑其它误差时,采用TDoA方法进行定位,理论误差可达到cm级。由于UWB信号采用持续时间极短的窄脉冲,在时间、空间的分辨力都很强,因此,系统的多径分辨率极高(1 ns脉冲的多径分辨率为30 cm),但在室内外交接处,与采用TDoA方法的其他常规无线定位法一样,由非视距传播造成的NLOS误差也是UWB定位误差的主要来源[5]。因此,在主Sensor接收到UWB时刻信息时,为了提高定位精度,就需要对NLOS误差进行消除。本文采用Kalman滤波器来对时刻信息进行处理,消除NLOS误差。
在Server端,由于UWB和DGPS的刷新率的不同,可能接收到3种情况下的位置数据,即只有UWB数据、只有DGPS数据、既有UWB数据又有DGPS数据。系统采用粒子滤波器对Server端的位置数据进行处理,粒子滤波器对任意分布噪声都适用,并能够很好地融合不同传感器的数据,整个系统采取的数据融合示意图如图3所示。
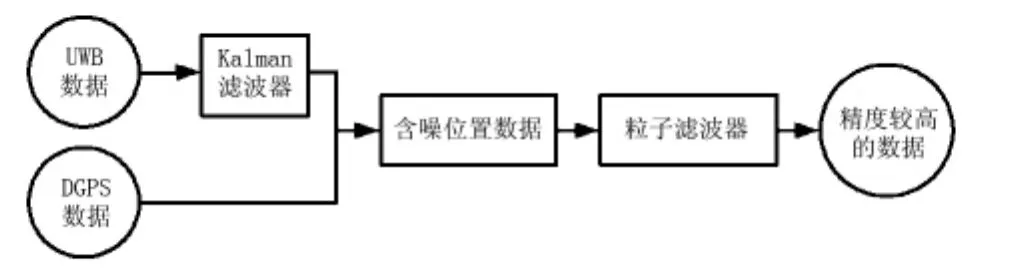
图3 系统数据融合示意图Fig 3 Diagram of system data fusion
2.1 Kalman滤波器消除NLOS误差
Kalman滤波就是建立2个分别表示未知状态的转移过程和测量系统输入与输出关系的方程式,为某时刻的状态值与当前时刻以及之前各时刻的测量值建立关系。即Kalman滤波转变为求解未知状态方程和测量方程的问题。Kalman滤波主要由状态转移方程(式(1))和测量方程(式(2))组成

其中,s(m)=[x(m),y(m)vx(m),vy(m)]T为状态向量,z(m)为测量向量,A为采样间隔Δ的状态转移矩阵,G(m)为测量矩阵,w(m)=[0 0wx(m)wy(m)]为速度噪声分量,其协方差矩阵为Q,v(m)为噪声分量。建立了关系方程之后,就可以在给了m时刻的状态向量和估计误差的协方差的初始值之后,通过迭代运算对不同时刻的状态向量做出估计。迭代过程

采用Kalman滤波消除NLOS误差,首先通过状态转移方程得到Tag的估计位置,该估计位置到一个Sensor之间的距离与它到主Sensor的距离之差,再与TDoA的测量值进行比较,若比较结果大于设定的门限值,则判定该Sensor接收的数据含有NLOS误差。对判定不含NLOS误差的数据,直接采用TDoA算法进行定位,对含有NLOS误差的数据,构造NLOS加权矩阵列[6],利用Kalman滤波对NLOS误差进行估计和消除,得出较精确的Tag位置数据。
2.2 粒子滤波器实现数据融合
粒子滤波(particle filter,PF)技术是一种用于非线性、非高斯系统的滤波方法,其思想基于蒙特—卡洛方法(Monte-Carlo methods),它利用粒子集来表示概率,可以用在任何形式的状态空间模型上。其核心思想是通过从后验概率中抽取的随机状态粒子来表达其分布,是一种顺序重要性采样法(sequential importance sampling)。其优点在于对任意噪声都适用,并且能够很好的融合不同传感器数据。文献[7,8]叙述了粒子滤波器的一般算法。
为避免粒子退化现象,采用重采样算法以去除权值小的粒子。实验从系统变化模型中产生粒子

由式(9)可知,权重的递推更新式表示为

由式(10)知,可以在重采样过程中舍弃权重较小的粒子。
实验中,UWB数据的刷新率要大于DGPS的刷新率,即zt包含了一个DGPS位置信息和多个UWB位置信息,可以表示为

由于每种测试手段中(UWB,DGPS)的随机测量误差是独立的,可以获得以下的式子

建立GPS接收机模型为


3 实验仿真分析
实验分两部分进行,第一部分验证Kalman滤波消除NLOS误差的效果,第二部分验证系统的无缝定位效果。为测试定位算法的定位效果,采用室内外混合环境场景,6只UWB传感器安放在室内的角落,Tag在室外沿着半径为2R的半圆弧从A门进入室内,在室内沿着半径为R的半圆弧从B门出去,如图4所示。
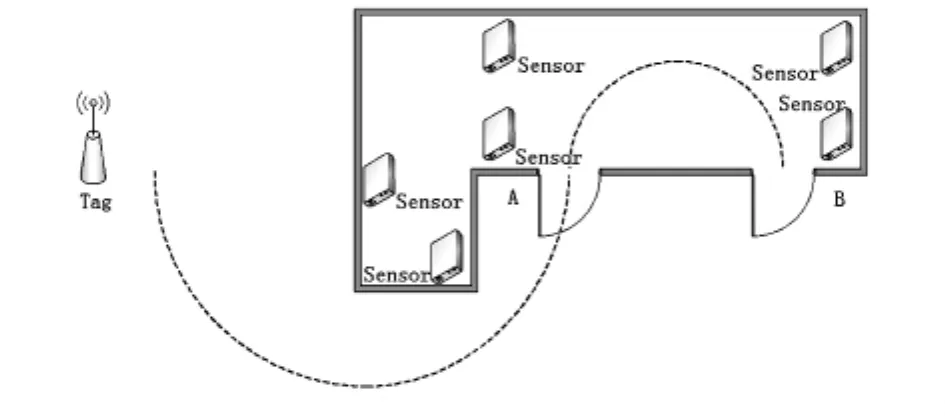
图4 实验场景Fig 4 Test scene
实验中,Tag以初速度2 m/s前进,Kalman滤波的参数为Δ=0.5 s,Q=0.05,粒子滤波器采用400个粒子。默认UWB信号有效传输距离为10 m,半径R为4 m。
实验首先验证Kalman滤波消除NLOS误差的效果,然后验证系统的定位效果。
图5(a)为没有使用Kalman滤波的原始运动轨迹图,图5(b)是只有UWB信号情况下使用Kalman滤波消除NLOS误差的运动轨迹图,实验图为大地坐标的2维图。从图5可知,在室内外交接的地方(图中x轴-6.6108~0 m坐标对应值),UWB信号由于NLOS误差受到很大干扰,定位精度下降比较明显,在x坐标轴-3.7822 m点上达到最大误差80.32 cm,而使用Kalman滤波器可以很好地消除NLOS误差,其最大误差17.13 cm,可见Kalman滤波对于UWB信号NLOS误差的消除效果较好。
图6为在粒子滤波器基础上使用Kalman滤波对UWB信号进行滤波的前后效果图,由图可知,Kalman滤波可以与粒子滤波器很好的结合,尤其在室内外交接的地方(图中x轴-6.6108~0 m坐标对应值),定位精度从平均36.9 cm提高到15.6 cm。可见,先使用Kalman滤波器对UWB信号的NLOS进行滤除,再使用粒子滤波器进行数据融合和滤波,比单纯使用粒子滤波器具有更好的定位效果。
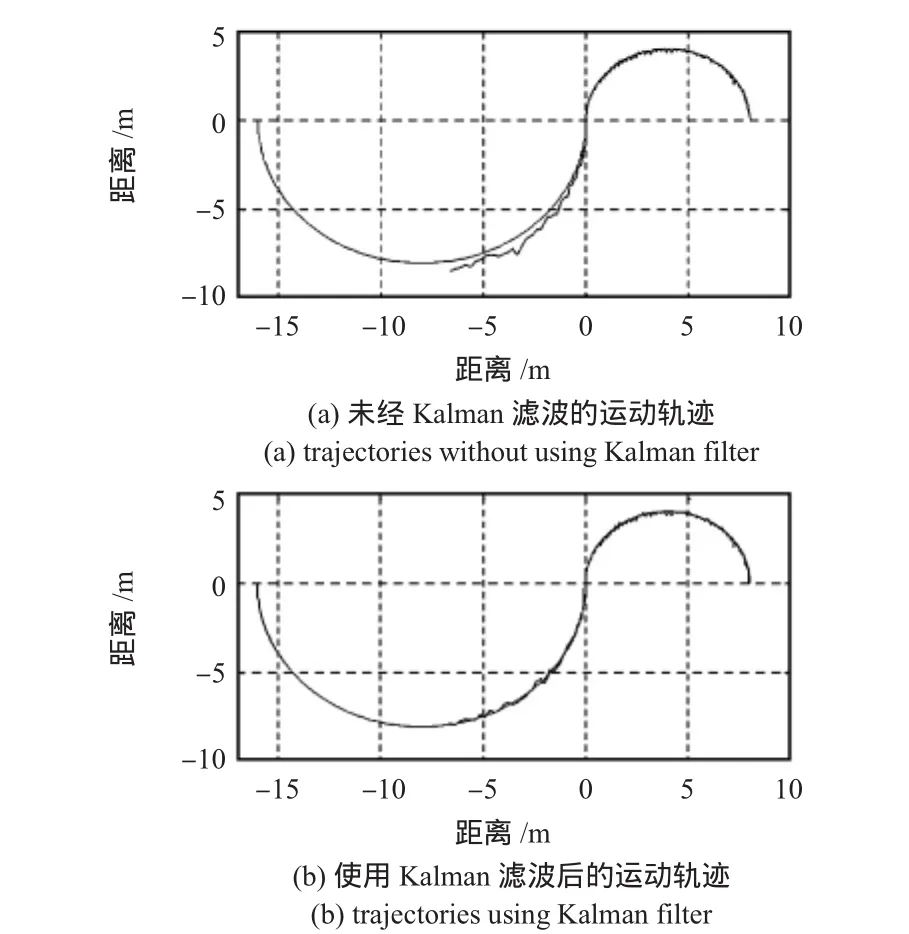
图5 使用Kalman滤波的前后效果图Fig 5 Effect diagram before and after using Kalman filter
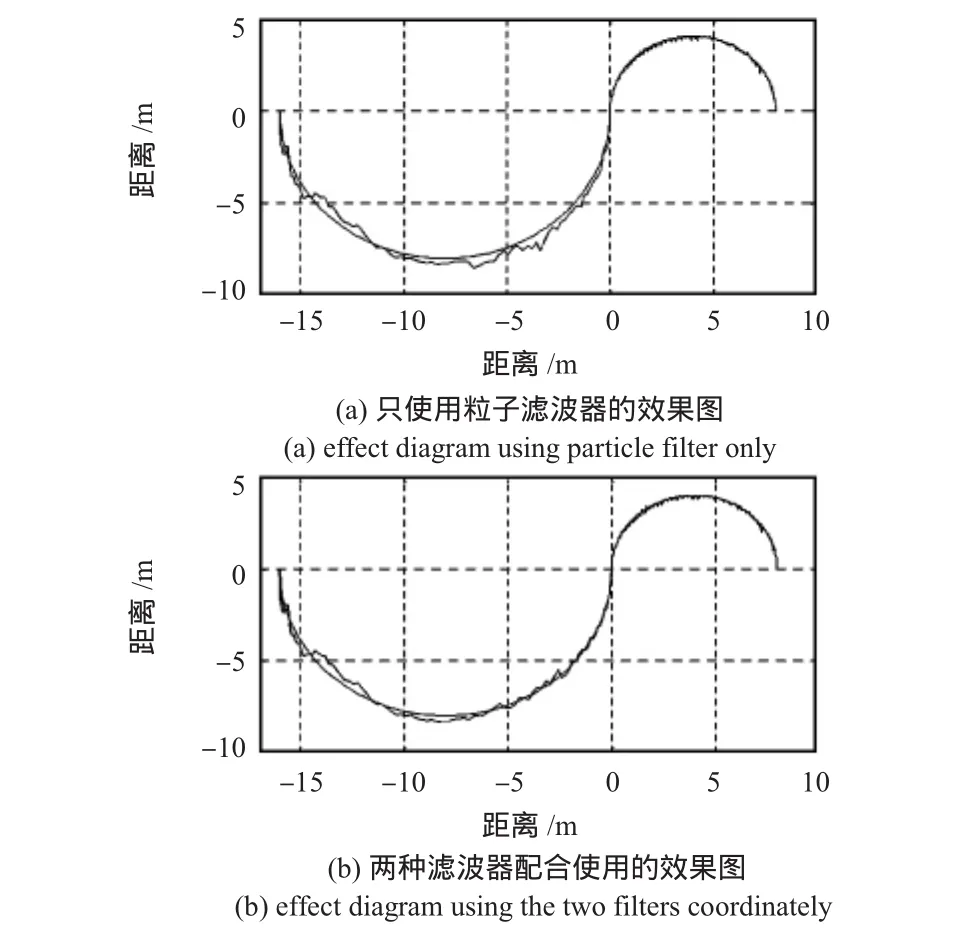
图6 在粒子滤波器基础上使用Kalman滤波前后效果图Fig 6 Effect diagram before and after using Kalman filter based on particle filter
实验结果表明:该方法能够使系统定位精度在室内达到cm级,室外达到较小的dm级,在粒子滤波器基础上使用Kalman滤波器对UWB数据进行滤波,能够使系统整体定位精度提高19%,实现精度较高的室内外无缝定位。
4 结论
通过实验得出,将UWB和DGPS两种定位方法相结合,利用GPRS信号作为DGPS传输数据的载体,使用Kalman滤波器来消除UWB的NLOS误差,并使用粒子滤波器对DGPS和UWB数据进行融合的方法,能够构成一个全面、准确的定位网络,如果能够将算法进一步完善,例如:对于门限和参数设定的具体研究,并能够硬件实现,那么,无论在商业上还是在军事应用上都具有可观的价值。
[1]阮卫华.常见的室内无线定位技术简介[J].科技信息,2009(33):874.
[2]张 涛,徐晓苏.基于小波和人工智能技术的车辆无缝定位技术研究[J].控制与决策,2010,25(7):1110 -1112.
[3]李 杰.基于UWB和DGPS的混合定位方法研究[J].计算机应用与软件,2010,27(5):212 -215.
[4]邬春明,张海波.基于 WSNs的风力发电运行监测系统LEACH协议改进研究[J].东北电力大学学报,2011,31(1):29-30.
[5]尹 蕾,李 瑶,刘洛琨,等.一种基于卡尔曼滤波的UWB定位算法[J].通信技术,2008,41(2):10 -12.
[6]孙克辉,蔡永棋.NLOL环境下的卡尔曼滤波跟踪定位算法[J].微计算机信息,2009,25(21):163 -165.
[7]毛 琳,刘 胜.多传感器分布式信息融合粒子滤波器[J].计算机工程与应用,2010,46(12):118 -119.
[8]尹建君,张建秋.多传感器快速粒子滤波器融合的方法及其在导航中的应用[J].传感技术学报,2007,20(9):2113-2118.
猜你喜欢
电子制作(2019年11期)2019-07-04
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
电子制作(2018年16期)2018-09-26
雷达学报(2017年1期)2017-05-17
系统工程与电子技术(2016年7期)2016-08-21
火控雷达技术(2016年2期)2016-02-06
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23