基于PVDF压电传感器的车辆动态称重信号的研究*
2012-07-25 05:35钟汇才梁艳菊林蓁蓁
传感器与微系统 2012年4期
陈 政,钟汇才,李 庆,梁艳菊,林蓁蓁
(1.中国科学院微电子所昆山感知中心,江苏昆山 215347;2.中国科学院微电子研究所,北京 100029)
0 引言
车辆的动态称重(weight-in-motion)是智能交通系统要解决的关键技术之一,具有速度快、效率高、不干扰正常交通等优点。在交通系统中采用车辆动态称重系统不仅可以有效地提高交通系统运输效率,还可以为交通管理的信息化和智能化提供实时的交通数据。对于怎样分析车辆动态称重系统的称重过程和称重信号,国内外的学者展开了诸多研究工作。Ono T提出用受力分解和Grey估计模型分析车辆的动态称重过程[1];Kim S K等人结合AFT模型和归一化重构信号测量动态车重[2];Deesomsuk T等人用Vehicle-bridge模型分别对定车重和时变车重进行了实验和比较[3];XU Jian等人用离散小波变换除去信号噪声提高WIM系统精度[4]。总体而言,目前的研究能较好地分析系统的受力过程,但是这些方法普遍采用复杂的软件算法,增加系统在计算上的时间消耗,大大影响系统的实时性。
本文使用聚偏二氟乙烯(PVDF)压电薄膜作为系统的称重传感器,提出将传感器对车辆轴重的响应过程看作车辆重力瞬态作用下的阻尼振动的过程,称重结果即为系统对瞬态作用力的响应。该方法着重于分析信号频率方面的特点,忽略PVDF传感器的粘性特征,大大简化了车辆称重的分析过程,可以简洁有效地分析出信号的频谱特点。最后,通过实验验证了理论分析的结果。
1 车辆动态称重系统的信号分析
PVDF是一种高分子聚合物型材料,具有压电系数高、介电强度高、稳定性好等诸多优点,非常适合作为车辆动态称 重传感器[2,5~7]。在称重系统中使用的典型PVDF压电薄膜传感器为条状传感器,其规格为3 m×6.6 mm。取一段长为L,宽为W,厚为T的PVDF薄膜为研究对象。根据晶体电学理论和实际应用情况,在无外电场的条件下,由第一类压电方程可以得到PVDF压电薄膜的电位移矢量为

式中Di为材料的电位移矢量,dij为压电常数,Tj为车辆经过传感器产生的应力,i为空间坐标的3个分量,j为二阶对称张量的6个独立分量。选取z轴为PVDF的极化方向,x轴垂直于极化方向,y轴垂直于x轴和z轴。在车辆经过传感器时,传感器受z轴方向的车辆重力作用,在z轴方向产生的极化电荷。由于PVDF材料拉伸极化后具有4 mm点群的对称性,可以得到传感器的电荷位移矢量D为

PVDF传感器的d15远小于d33,d32及d31,在实际的计算中,可以忽略d15的影响。同时,由于传感器在车辆行进的y方向上的宽度仅为6.6mm,相对于车辆的行进速度,可以忽略在y方向上的受力。故仅考虑z方向上的作用力,则有

通过对压电体厚度方向上伸缩振动模式的分析,其电位移矢量D为[8]
式中 ε3为介电常数,E3为电场强度。在无电场的情况下,车辆经过PVDF压电传感器产生电荷的过程,符合压电体在厚度方向上做伸缩振动产生电荷的过程。PVDF传感器在厚度方向上的伸缩振动模式为阻尼振动,即传感器对车辆轴重的响应过程为车辆重力瞬态作用下的阻尼振动的过程。
根据第一类压电方程,S'3为z方向上的应变量,且S'3有

为柔性常数。在电场为0的情况下为常数,故对于电位移矢量D

不考虑其他方向对z方向形变的影响,由电位移矢量D可以求出z方向上的传感器表面自由电荷Q

根据阻尼振动的运动学分析,用阻尼振动的运动方程来描述传感器在z方向上产生的位移,则由方程(7)有
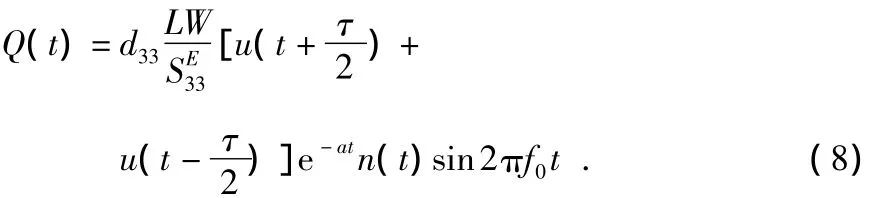
其中

u(t)为单位阶跃函数,n(t)为修正因子,e-at为阻尼振动的衰减因子,T0为信号持续时间。通过对信号进行Fourier变换得到信号的频谱F(ω)

其中,E为常数。
可以看出:信号主要分布在以f0为中心的一个频率区间,中心频率f0与信号持续时间T0呈反比。考虑到压电传感器和安装材料的强阻尼性,会给传感器信号的复频域带来-ja的变化,同时由于F(n(t))的影响,信号的频率区间会向高频部分扩展,高频部分的将会形成较长的拖尾。
由以上的分析可以看出:车辆经过PVDF传感器时,车速越快,信号的持续时间T0越短,信号的中心频率越高。通过测量最低车速下信号的频率,可以得到系统产生信号的最低中心频率。在实际的车辆动态称重系统中,PVDF压电传感器的宽度为6.6 mm,安装槽宽度为20 mm,可以通过PVDF传感器和安装槽宽度估计信号的持续时间T0。取10 km/h的速度为最低车速,信号的持续时间T0在2.37~7.19 ms之间,即信号最低f0在140~422 Hz之间。
研究表明:在车辆动态称重系统中,车辆动态称重环境中的噪声主要为低频范围内的噪声[2]。在车速较低的情况下,干扰信号的频率约为3~20 Hz[9],幅值变化大约可达10%左右;在车速为60~100 km/h时,路面振动信号的频率都在0~90 Hz范围[10]。电路系统中普遍存在的50 Hz工频干扰也存在于低频范围。相对于90 Hz以下的低频噪声,PVDF产生的信号主要集中在140 Hz以上高频范围,故在设计车辆动态称重系统的调理电路时,设计高通滤波器,可以在有效地除去低频噪声的情况下保留信号的原始信息。
2 实验称重系统搭建
整个测量系统的结构如图2所示。PVDF压电传感器采用MEAS公司的Roadtrax BL型I类传感器,长度为3 m。输出电缆长为35 m。测试车辆分别选取NISSAN Teana和Mazda 6家用轿车。

图1 实验平台结构图Fig 1 Structure diagram of experimental platform
PVDF压电薄膜是电荷敏感元件,其产生的信号为电荷信号[11],在进行测量时需要进行电荷信号到电压信号的转换。PVDF压电薄膜又具有电容特性,其自身有较大的容值[12]。在系统中使用中PVDF压电传感器通过同轴电缆输出,该同轴电缆也存在电阻和电容。在具体设计电荷放大级时,需要使用高精度、高阻抗运放。运放的反馈端采用低电容Cf、高电阻Rf并联的设计。
3 实验结果
在实验平台的基础上进行了车辆称重信号采集。在路面平整、天气晴朗、无其他车辆经过的环境中进行实验,并采用高精度直流电源作为信号处理电路供电电源。实验车辆以 10,20,30,40,50 km/h 左右的速度经过传感器,用示波器记录实验数据,采样频率为1.25 MHz。图2为 NISSAN Teana轿车以时速8.9 km/h经过传感器产生的典型信号和信号的幅频谱。
从图2(a),(b)两图中可以看出:时速为8.9 km/h的情况下,Nissan Teana前轴的称重有用信号周期为T0=5.09 ms。根据之前的理论分析,其信号的中心频率f0=1/T0,即f0=196Hz。在图3左图中可以看出:幅频谱的中心频率f=211Hz。同理,从图2(c),(d)两图中可以得到其信号的T0=4.53ms,f0=221Hz,幅频谱的中心频率f=224Hz。

图2 时速8.9 km/h时车辆前、后轴信号及幅频谱图Fig 2 Signal and amplitude spectrum of front/rear axle of car at speed of 8.9km/h
分别对10~50 km/h车速下两辆车得称重信号中心频率进行分析,结果如表1所示。从理论分析与实际测量的对比可以看出:阻尼振动模型分析得到的车辆称重信号中心频率f0与实际车辆称重中心频率f的误差在10%以内。在误差允许的范围内,用阻尼振动模型可以简洁地估计出车辆称重信号的中心频率,为后续的信号处理打下基础。在车速最低为8.9 km/h的情况下,传感器产生信号的中心频率最低为211 Hz,相对于车辆低频噪声的最高频率90 Hz,传感器产生的信号可以看作一个高频信号。称重信号的中心频率随着车速的增加而提高,在车速为49.3 km/h时,称重信号的中心频率为1735Hz,远远大于90Hz的低频噪声,完全可以将称重信号看做一个高频信号。
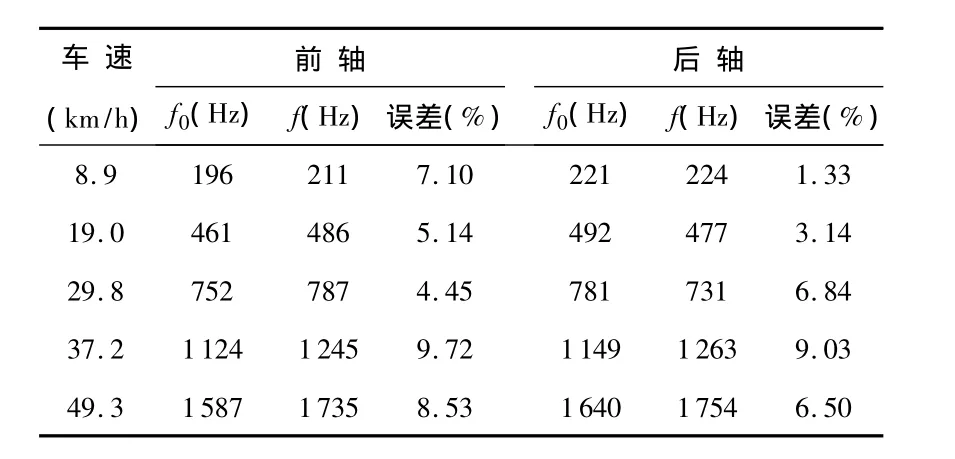
表1 称重信号中心频率与理论值对比表Tab 1 Contrast of center frequency and theoretical value of weighting signal
用Matlab设计高通滤波器来对信号进行处理。设计滤波器的通带截止频率为90 Hz,阻带截止频率为10 Hz。将进行滤波处理后的信号与原信号进行对比,如图3所示。在车速最低为8.9 km/h的情况下,原始信号与滤波信号的波形几乎没有差别。以信号的积分值作为参考标准,比较10~50 km/h车速下两车称重原始信号与滤波信号,结果如表2所示。在车速为8.9 km/h的情况下,滤波信号与原始信号存在最高为3.76%的误差。随着车速的增加,误差大大减小,在车速为49.3 km/h的情况下,滤波信号与原始信号的误差仅为0.04%,此时完全可以忽略滤波对信号完整性的影响。考虑到车速为50 km/h左右时,滤波处理对信号完整性的影响已经可以忽略,无需再讨论50 km/h以上的车速。

表2 原始信号与滤波信号对比表Tab 2 Contrast of original signal and filtering signal
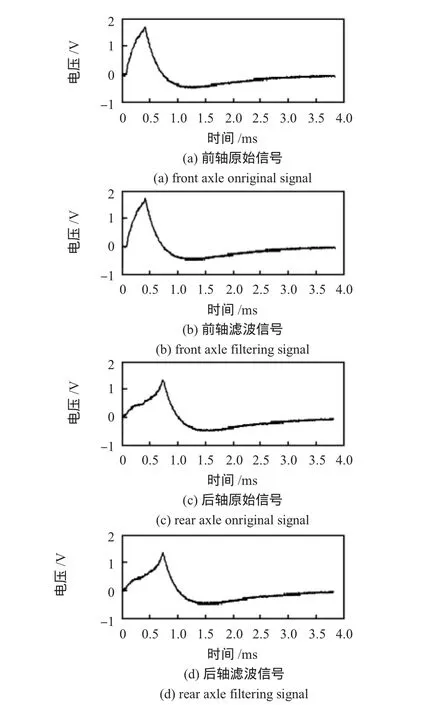
图3 时速8.9 km/h时车辆前、后轴原始信号与滤波信号图Fig 3 Original and filtering signal diagram of front/rear axle of car at speed of 8.9km/h
4 结论
本文根据车辆动态称重的实际情况,采用阻尼振动的模型对车辆经过PVDF压电传感器时产生的电信号进行了理论分析,得到该信号的频谱特点。针对该特点,搭建了PVDF测试电路并设计了实验平台,进行了车辆称重的实际测试。实验证明:该车辆称重信号的频谱以f0为中心分布,主要集中在高频段。在车速为8.9 km/h的低速情况下,信号的中心频率f0仍大于干扰噪声的最高频率。在称重系统中,以90Hz为通带截止频率设计高通滤波器,可以在硬件层面上除去低频噪声,从而提高系统测量精度和实时性。
[1]Ono T.On dynamic weighing of highway vehicles in motion[C]//SICE 2003 Annual Conference,2003:2108 -2115.
[2]Kim S K,Cho I,Lee J H,et al.A new method for accurately estimating the weight of moving vehicles using piezoelectric sensors and adaptive-footprint tire model[J].Veh Syst Dyn,2003,39(2):135-148.
[3]Deesomsuk T,Pinkaew T.Evaluation of effectiveness of vehicle weight estimations using bridge weigh-in-motion[J].The IES Journal Part A:Civil& Structural Engineering,2010,3:96 -110.
[4]Xu Jian,Ma Bin.Investigation of discrete wavelet transform for signal de-noising in weight-in-motion system[C]//International Conference on Future Computer and Communication,2010:769 -772.
[5]Callahan J T,Baruh H.Active control of flexible structures using segmented piezoelectric actuators[C]//Proc of SPIE,1995:630 -643.
[6]Marsili R.Measurement of the dynamic normal pressure between tire and ground using PVDF piezoelectric films[J].IEEE Trans on Instrum Meas,2000,49(4):736 -740.
[7]Kimoto A,Sugitani N,Fujisaki S.A multifunctional tactile sensor based on PVDF films for identification of materials[J].Sensors Journal,2010,10:1508 -1513.
[8]李 远,秦自楷,周志刚.压电与铁电材料的测量[M].北京:科学出版社,1984.
[9]凌 杰,公路动态称重系统的设计理论研究[D].西安:长安大学,2001.
[10]查文华,洪宝宁,徐 毅.交通荷载下路面振动响应信号的时频特征分析[J].工程抗震与加固改造,2007,29(4):105 -109.
[11]Yi Jingang,Liang Hong.A PVDF-based deformation and motion sensor:Modeling and experiments[J].Sensors Journal,IEEE,2008,8(4):384 -391.
[12]Toda M,Thompson M L.Contact-type vibration sensors using curved clamped PVDF film[J].Sensors Journal,2006,6(5):1170-1177.
猜你喜欢
压电与声光(2019年1期)2019-02-22
装备制造技术(2018年8期)2018-10-17
铜仁学院学报(2018年6期)2018-07-05
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
汽车维护与修理(2015年5期)2015-02-28
振动、测试与诊断(2014年6期)2014-03-01
振动、测试与诊断(2014年6期)2014-03-01