基于等效磁网络法的新型混合励磁无刷爪极发电机的性能计算
2012-09-20 05:49乔东伟王秀和朱常青
电机与控制学报 2012年11期
乔东伟, 王秀和, 朱常青
(山东大学电气工程学院,山东济南 250061)
0 引言
电励磁有刷爪极发电机结构简单、成本低、气隙磁场调节方便,因而得到了广泛的应用,但其极间漏磁大,功率密度小,励磁损耗大,电机效率低[1-3],且存在电刷-滑环结构,可靠性不高。因此,国内外学者都致力于这种电机的改进研究。
混合励磁爪极电机由电励磁绕组和永磁体两个磁动势源共同产生气隙磁场,可以通过调节电励磁绕组的电流进行气隙磁场的调节[4-5]。
文献[6-7]提出了一种串联式混合励磁爪极电机,永磁体为圆环形,采用轴向充磁,永磁体放置在转子爪极轭的中间,励磁绕组套在转子爪极轭上。该电机中,电励磁磁场与永磁磁场是串联关系。由于永磁体本身磁阻非常大,磁场调节所需的励磁电流很大,可能导致永磁体出现不可逆退磁,且存在电刷-滑环结构。文献[8-9]给出了一种并联磁路的混合励磁爪极发电机,在爪极之间加入了一块切向充磁的永磁体,永磁体的主要作用是增加电机的主磁通和减少爪极之间的漏磁。然而该电机采用电刷-滑环结构,可靠性不如无刷结构的电机。
与普通电机不同,爪极电机的结构、磁场分布具有典型的三维性,导致对它的设计、分析有一定的难度。国际上较为直接的方法就是采用三维有限元法来进行计算,文献[10-12]采用该方法对爪极电机进行了分析,但是,采用有限元法计算量大,计算时间长,对计算机硬件要求高[13]。
本文提出了一种新型结构的混合励磁无刷爪极发电机,为了快速、准确地分析电机的磁场分布,建立了考虑了磁场三维分布的电机等效磁网络模型,求解得到电机的空载磁场分布情况。此外,利用等效磁网络模型,结合电机的相量图对电机的负载输出特性进行了计算。
1 新型混合励磁无刷爪极发电机的结构特点及其基本原理
新型混合励磁无刷爪极发电机的结构如图1(a)所示,由定子、爪极转子、永磁体、励磁支架和螺旋管形励磁绕组等组成。定子结构与普通三相交流电机相同,采用三相对称绕组。转子由两个爪极组成,每个爪极上有p个爪,两个爪极焊接在一起,一个跟轴相连,另一个的极掌部分有较大的内孔,励磁支架固定在端盖上,上面绕有励磁绕组,绕组和支架伸入爪极内。极数为2p,爪之间的间隙数等于极数,一半的间隙用于将两个爪极焊接在一起(采用非导磁材料),另一半用于放置切向充磁的永磁体,焊点和永磁体交错排列,如图1(b)所示。
新型混合励磁无刷爪极发电机的空载气隙磁场由永磁体和励磁绕组共同提供,永磁磁场与电励磁磁场为并联关系,其中永磁体起辅助增磁作用。
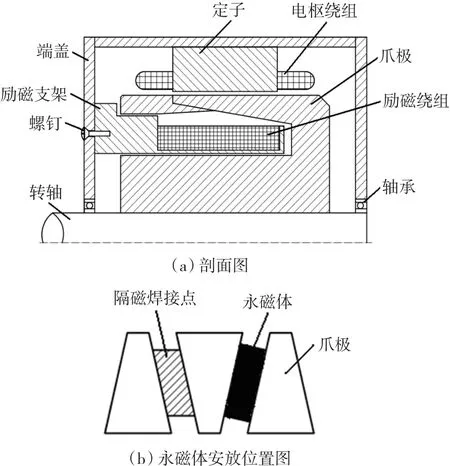
图1 新型混合励磁无刷爪极电机的结构图Fig.1 Structure of the novel HEBCA
当励磁电流为零时,永磁体产生的磁场绝大部分通过爪极、转子磁轭闭合,只有很小的一部分进入定子,气隙磁通很小。当励磁绕组通电时,电励磁磁动势“迫使”永磁体产生的磁通进入气隙,而不再在转子内闭合,气隙磁场随着励磁电流的增大而增大。
2 磁阻计算及等效磁网络模型的建立
由于电机结构和磁路的复杂性,将电机磁路分为以下几个部分:爪极、空气隙、爪极极掌、爪极轭、附加气隙、定子齿、定子轭和永磁体。
2.1 爪极磁阻的计算
爪极根部大,端部小,因此将爪极沿轴向切分为n段,每个切分段的磁路横截面逐步缩小,当切分段长度充分小时,第i个切分段可以等效为图2所示的元件,用柱坐标系表示时,切分元件的径向、切向与轴向磁阻计算分别为
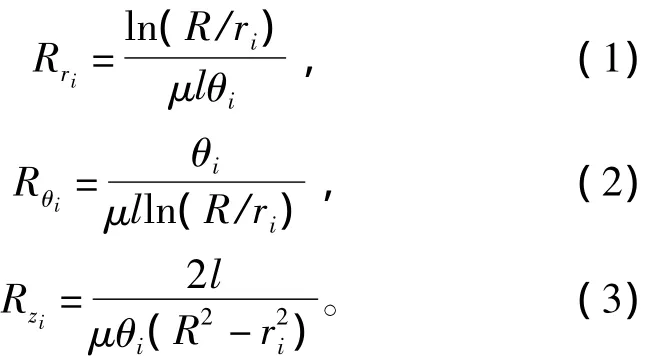
式中:Rri为切分元件的径向磁阻;Rθi为切分元件的切向磁阻;Rzi为切分元件的轴向磁阻;μ为材料的磁导率。
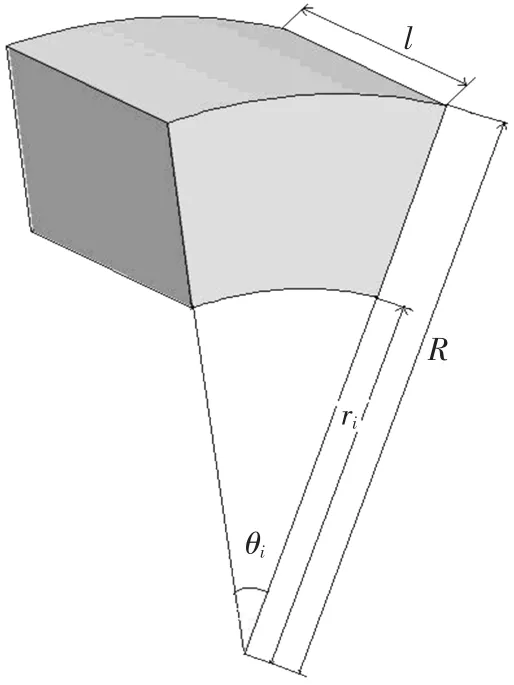
图2 柱坐标系下的切分元件Fig.2 The split element in cylindrical coordinate
2.2 气隙磁阻的计算
考虑电机开槽的影响,将电机主气隙的磁阻分为齿磁阻与槽磁阻两部分进行计算,如图3所示,磁导表达式为

式中:τs为齿距;le为轴向长度;b0为槽宽度;g为气隙长度;r为槽口圆环半径(其最大值为b0/2,最小值为 0[14])。
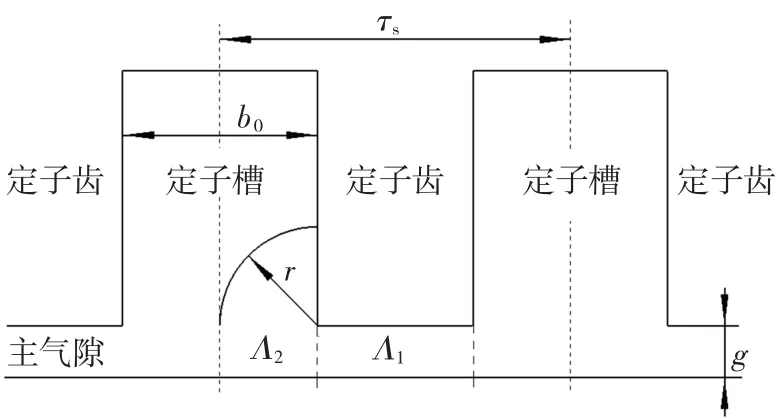
图3 气隙的等效磁导Fig.3 Equivalent air-gap permeance
2.3 永磁体及励磁绕组的等效
由于爪极沿轴向进行切分,因此将永磁体等效为m段永磁体进行计算,每段的长度与爪极切分段的切分长度一致,每段永磁体可以等效为励磁源和一个磁阻的串联结构,即
式中:Br为永磁体剩磁密度;LPM为永磁体充磁方向厚度;SPMj为永磁体与爪极的接触面积。
对于励磁绕组来说,励磁源的励磁磁动势Fe为励磁绕组的匝数和通过励磁绕组的励磁电流的乘积,磁阻Rry为励磁绕组内部磁路的磁阻(转子轭的磁阻)。
2.4 电机其他结构的磁阻计算
电机极掌、爪极轭、附加气隙与定子轭的磁阻可以采用图2所示的柱坐标系进行分解,根据不同的需要,求解不同方向的磁阻即可。电机的定子齿为平行齿,可以等效为一个长方体,进而求解其磁阻即可。
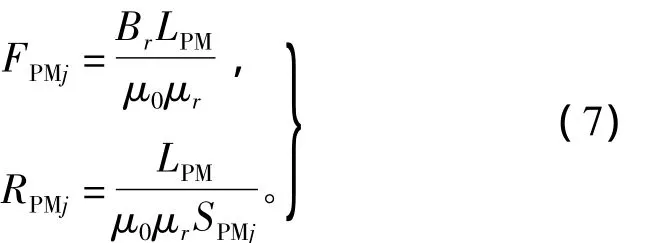
2.5 等效磁网络模型的建立
混合励磁无刷爪极发电机一对极的等效磁网络模型如图4所示。其中爪极沿轴向分为n段,由于永磁体长度小于爪极的长度,永磁体沿轴向分为m段。在分别计算出各部分的磁阻后,按照它们的结构顺序连接在一起,就形成等效磁网络模型。其中:Rsy为定子轭磁阻;Rt为定子齿部磁阻;Rg为气隙磁阻;Rr为爪极切分元件的径向磁阻;Ra为爪极切分元件的轴向磁阻;Rθ为爪极切分元件的切向磁阻;Rp为爪极极掌磁阻;Rry为转子轭磁阻;RPM为永磁体磁阻;Ra1、Ra2分别为附加气隙磁阻;Fe为电励磁磁动势;Fa为每极电枢反应磁动势。为了清晰的表现电机的主磁路,图4没有画出电机的漏磁路。
3 电机空载磁场的求解计算
采用上述模型对一台11 kW,28 V混合励磁无刷爪极发电机的空载磁场进行了计算和分析,电机结构尺寸为:极对数p=6;定子外径定子Dso=198 mm;内径铁心长度Dsi=152 mm;气隙长度lgap=0.5 mm;爪极极尖宽度dct=12 mm;爪极极尖厚度hct=3.4 mm;爪极极根宽度dcr=37 mm;爪极极根厚度hcr=26 mm;转子极轭外径Dry=80 mm。电机为六对极,本计算过程取一对极的计算范围。
根据磁路与电路的相似性,采用节点法列写磁路的节点磁位方程组,可以得到

式中:F为节点磁动势;Λ为磁路磁导;Φ为节点磁通;[F]为节点磁动势矩阵;[Λ]为磁导矩阵;[Φ]为磁通矩阵。
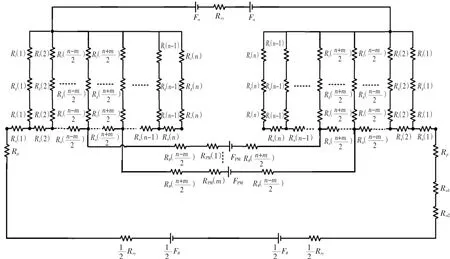
图4 新型混合励磁无刷爪极发电机的等效磁网络模型Fig.4 Equivalent magnetic circuit network model of the HEBCA
受电机铁心饱和的影响,式(8)为非线性方程组,采用牛顿-拉夫逊迭代法可以求得各点的磁位值及通过各点的磁通值,从而进一步得到电机各个点的磁通密度。
为了对等效磁网络的计算结果进行验证比较,采用三维电磁场有限元法对电机进行了分析,图5为励磁电流为5 A时采用有限元法求解得到的新型混合励磁无刷爪极电机的磁场分布。
图5 励磁电流5 A时新型混合励磁无刷爪极电机的磁场分布Fig.5 The flux density distributions of the novel HEBCA with 5 A field current
表1为励磁电流为5 A时采用有限元法与等效磁网络法计算的沿转子轴向位置Z=5 mm、Z=27.5 mm与Z=50 mm处电机的气隙径向平均磁密值;表2为采用两种方法求解使用的时间;图6为电机转速为1 500 r/min时采用两种方法求解得到的电机空载相感应电动势曲线。
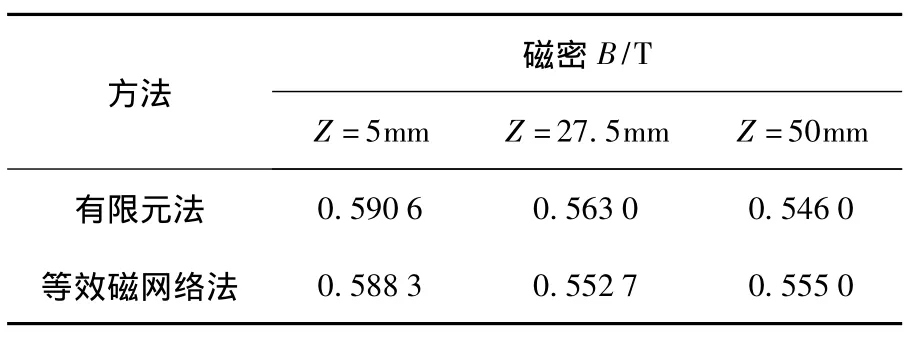
表1 混合励磁无刷爪极发电机的气隙平均磁密值Table 1 Air-gap flux density of the HEBCA
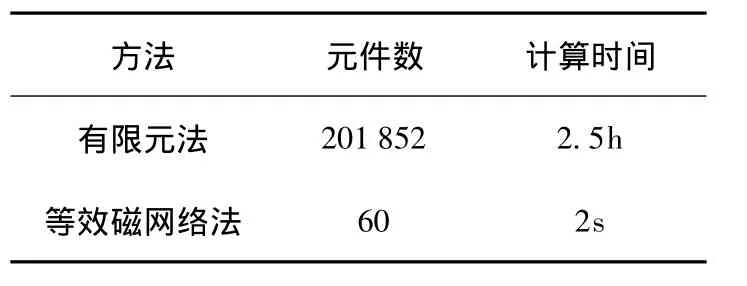
表2 求解时间Table 2 Comparison of computation time
由表1及图6的计算结果可以看到,等效磁网络法的计算结果与有限元计算结果一致,满足计算精度的要求。而由表2的计算时间可以明显的看到,等效磁网络法在满足了计算精度的同时大大提高了计算速度。
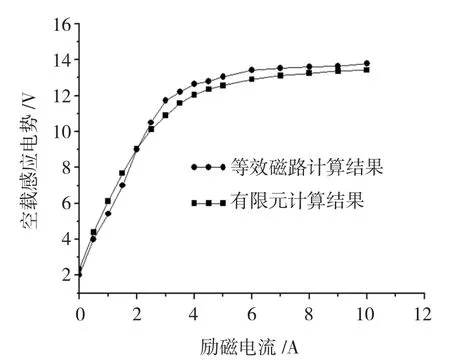
图6 空载感应电动势随励磁电流变化曲线Fig.6 Back-EMF for different field currents
4 电机负载输出功率的求解计算
当电机带负载时,由于电枢反应的作用,气隙磁场发生变化。利用双反应理论,将电枢反应磁动势分解为直轴分量Fad与交轴分量Faq,二者分别对应电枢绕组电动势Ead与Eaq。
负载时,电机的电压方程为

式中:U为电枢绕组相电压;I为电枢绕组相电流;R为电枢绕组相电阻;Xσ为电枢绕组相漏抗。
进一步改写为

与式(10)对应的电机相量图如图7所示。
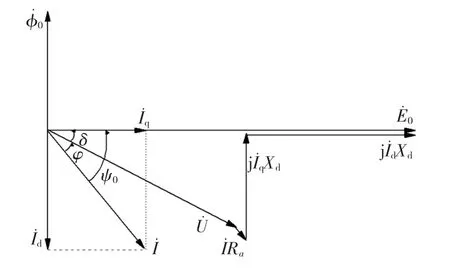
图7 爪极发电机的相量图Fig.7 Phasor of the HEBCA
4.1 负载输出的求解流程
结合式(10)及图7,得到式(11),联合电机的等效磁网络模型,即可以求解电机不同励磁电流下的输出电流,求解流程图如图8所示。
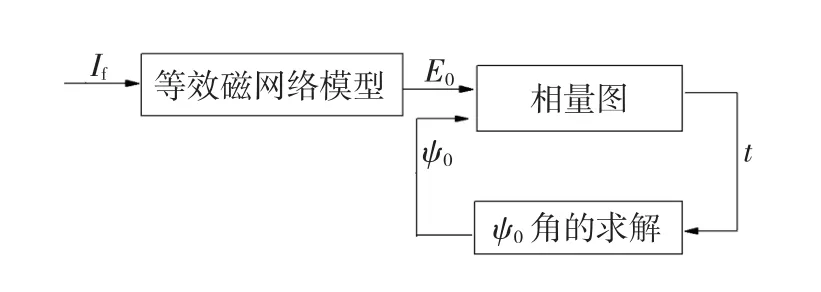
图8 电机负载分析流程图Fig.8 Block diagram of the procedure for output solution of the HEBCA
4.2 负载输出的求解及实验验证
当电机输出电压恒定,带纯阻性负载时,负载功率因数为1,采用牛顿-拉夫逊迭代法进行求解,即可得到不同励磁电流情况下对应的电机输出功率。
为了对计算结果进行验证,对11 kW,28 V混合励磁无刷爪极发电机样机进行了实验测试。图9、图10与图11分别为电机转速为3 000、4 000、5 000 r/min时,电机带纯阻性负载时的输出特性曲线。可以看出,仿真计算结果与实验结果吻合。
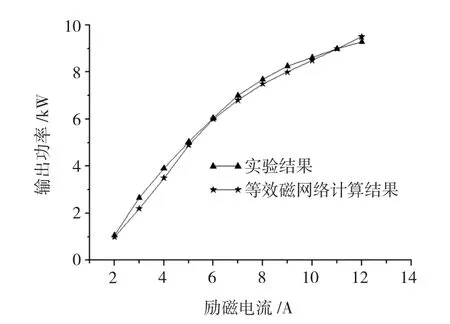
图9 3 000 r/min时电机输出功率随励磁电流变化曲线Fig.9 Output power for different field currents at speed of 3 000 r/min
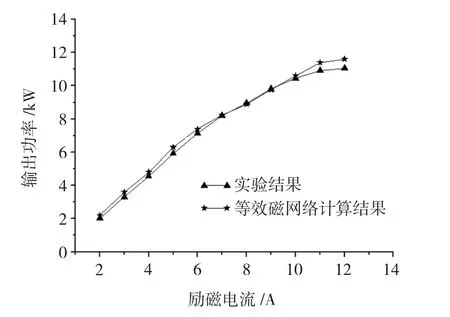
图10 4 000 r/min时电机输出功率随励磁电流变化曲线Fig.10 Output power for different field currents at speed of 4 000 r/min
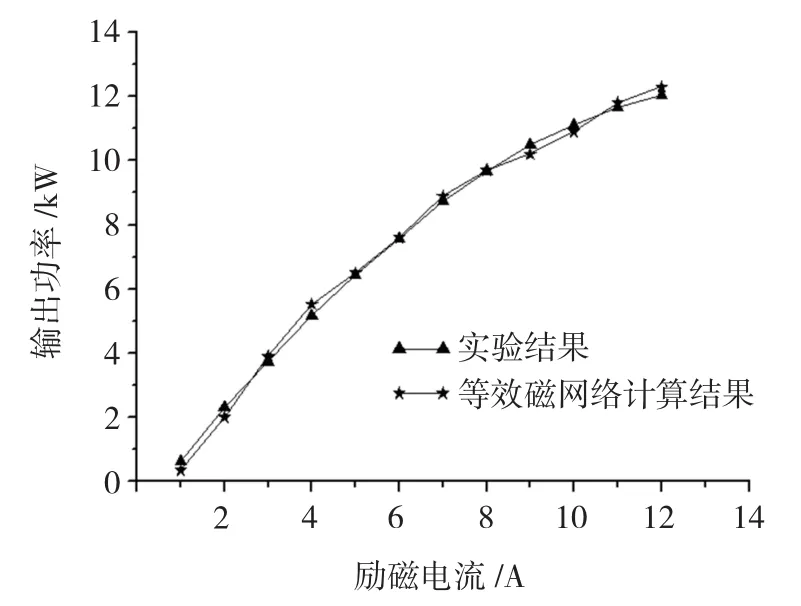
图11 5 000 r/min时电机输出功率随励磁电流变化曲线Fig.11 Output power for different field currents at speed of 5 000 r/min
5 结语
提出了一种新型的混合励磁无刷爪极发电机,建立了考虑磁场三维分布的电机等效磁网络模型,采用该模型对电机空载磁场分布进行了分析,与有限元相比,所建立的等效磁网络模型在满足计算精度的同时大大提高了计算速度。同时,利用等效磁网络模型,结合电机的相量图,求解出电机的负载输出特性,计算结果与实验结果相吻合。
[1]KAEHLER C,HENNEBERGER G.Eddy-current computation in the claws of a synchronous claw-pole alternator in generator mode[J].IEEE Transactions on Magnetics,2002,38(2):1201-1204.
[2]KAEHLER C,HENNEBERGER G.Transient 3-D FEM computation of eddy-current losses in the rotor of a claw-pole alternator[J].IEEE Transactions on Magnetics,2004,40(2):1362-1365.
[3]白海军,张凤阁.外永磁转子爪极电机转矩研究[J].电机与控制学报,2011,15(5):78-82,88.
BAI Haijun,ZHANG Fengge.Study on torque of claw pole machine with outer PM rotor[J].Electric Machines and Control,2011,15(5):78 -82,88.
[4]王群京,倪有源,李国丽.爪极电机的结构、理论及应用[M].北京:中国科学技术大学出版社,2006:5-8.
[5]NJEH A,MASMOUDI A,ELANTABLY A.3D FEA based investigation of the cogging torque of a claw pole transverse flux permanent magnet machine[C]//2003 IEEE International Electric Machine and Drives Conference,June 1-4,2003,Madison,USA.2003,1:319-324.
[6]赵朝会.串联磁路混合励磁爪极发电机的结构设计和特性[J].电工技术学报,2009,24(5):1-7.
ZHAO Chaohui.Structure designing and characteristic study of hecpg which magnetic circuit series connection[J].Transactions of China Electrotechnical Society,2009,24(5):1-7.
[7]ZHANG Da,ZHAO Chaohui,ZHU Lei,et al.On hybrid excitation claw-pole synchronous generator with magnetic circuit series connection[C]//2008 IEEE Conference Electrical Machines and Systems,October 17 - 20,2008,Wuhan,China.2008:3509-3513.
[8]王群京,陈军,姜卫东,等.一种新型混合励磁爪极发电机的建模与计算[J].中国电机工程学报,2003,23(2):67-70,76.
WANG Qunjing,CHEN Jun,JIANG Weidong,et al.The modeling and calculation on a new type hybrid claw-pole alternator[J].Proceedings of the CSEE,2003,23(2):67 -70,76.
[9]NI Youyuan,WANG Qunjing,BAO Xiaohua,et al.Optimal design of a hybrid excitation claw-pole alternator based on a 3-D MEC method[C]//Proceedings of the Eighth International Conference on Electrical Machines and Systems,September 27 - 29,2005,Nanjing,China.2005,1:644 -647.
[10]GUO Y G,ZHU J G,LU H Y.Accurate determination of parameters of a claw-pole motor with SMC stator core by finite element magnetic-field analysis[J].IEE Proceedings-Electric Power Applications,2006,153(4):568 -574.
[11]LIM Seungbin,JUNG Daesung,KIM Kichan.Characteristic analysis of permanent-magnet-type stepping motor with claw poles by using 3 dimensional finite element method[J].IEEE Transactions on Magnetics,2007,43(6):2519-2521.
[12]KAEHLER C,HENNEBERGER G.Transient 3-D FEM computation of eddy-current losses in the rotor of a claw-pole alternator[J].IEEE Transactions on Magnetics,2004,40(2):1362-1365.
[13]DU PELOUX B,GERBAUD L,WUTRZ F,et al.Automatic generation of sizing static models based on reluctance networks for the optimization of electromagnetic devices[J].IEEE Transactions on Magnetics.2006,42(4):715 -718.
[14]ZHU Z Q,HOWE D.Analytical prediction of the cogging torque in radial-field permanent magnet brushless motors[J].IEEE Transactions on Magnetics,1992,28(2):1371 -1374.
猜你喜欢
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年1期)2021-06-09
微特电机(2021年1期)2021-01-25
防爆电机(2020年4期)2020-12-14
防爆电机(2020年3期)2020-11-06
仪表技术与传感器(2020年5期)2020-06-11
电子制作(2016年11期)2016-11-07
电工技术学报(2015年6期)2015-11-15
电机与控制应用(2015年2期)2015-03-01
电机与控制应用(2015年1期)2015-03-01