
基于FPGA的水声信号检测系统设计
2012-09-21 05:34刘毅程锦房肖大为何光进
船电技术 2012年12期
刘毅 程锦房 肖大为 何光进
(海军工程大学兵器工程系,武汉 430033)
1 引言
对于需要在水下长时间工作的声信号检测系统,通常采用电池供电,因而往往要求元器件具有较低功耗,以延长系统的运行时间。在 FPGA芯片、DSP芯片、单片机中,FPGA芯片具有低功耗和高运算速度的特性,因而更适合用于水下系统。
MUSIC算法是一个可用于波达方向(DOA)估计的经典算法,其中包含一些不规则运算步骤,它们在FPGA中不易实现,鉴于此,本文将在基于FPGA系统中运用实用改进化的MUSIC算法判断水声信号源的方位。
2 FPGA简介
现场可编程门阵列(Field-Programmable Gate Array, FPGA)是在PAL、GAL、CPLD等可编程器件的基础上进一步发展的产物,具有更高的集成度、更强的逻辑实现能力和更好的设计灵活性[1]。FPGA是由许多可编程逻辑块组成的数字集成电路,这些逻辑块之间用可配置的互连资源连接,用户可以通过编程将这些逻辑块连接起来实现不同的设计,它是作为专用集成电路(ASIC)领域中的一种半定制电路而出现的,既解决了定制电路的不足,又克服了原有可编程器件门电路数有限的缺点[2]。
作为一种高密度可编程逻辑器件,FPGA具有低功耗、功能强大、开发周期短、投资小、便于修改及开发工具智能化等特点,目前已被广泛应用于通信、航天、医疗电子、汽车电子、工业控制等领域[3]。
3 系统设计
系统的功能框图如图 1所示。传感器阵列的每一个传感器对应一路数据,同步接收声信号后,送预处理板对信号进行放大、滤波,提高接收信号的信噪比。模数转换模块对预处理板输出的每一路模拟信号转换为数字信号,再将输出结果送FPGA芯片运行DOA算法,计算得到信号的声源方位。

图1 系统的功能框图
3.1 传感器阵列
本系统采用M元均匀线列阵,各个阵元间距为d,以第1个阵元为坐标原点,阵列所在直线为x轴建立直角坐标系,设信号源入射方向与阵列法线的夹角为θ,对于三维空间,θ是方位角,其几何模型如图2所示。λ为入射波波长,第m个阵元与第 1个阵元间的波程差为 Δdm=(m-1)dsinθ,则阵列流型为:

设有D个非相干窄带源S1、S2、…SD入射,其方位角分别为1θ、2θ、…Dθ ,则阵列流形为:
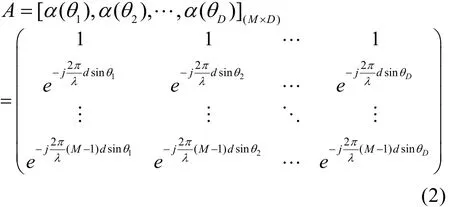
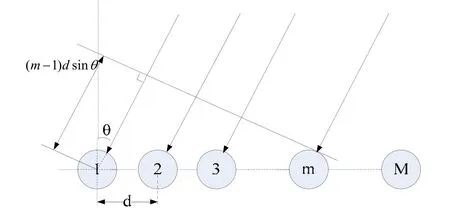
图2 均匀线列阵几何模型
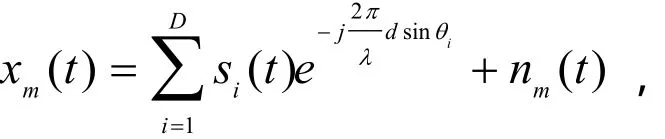

其中 si(t)为第 i个信号源的复包络,nm(t)为第 m个阵元上的零均值白噪声,由于入射信号源为非相干窄带的信号,故X(t)可近似表示为:

式中:表示D个信号源,A为阵列流形,N(t)表示噪声。
3.2 A/D转换模块
数据经传感器阵列采集后,送A/D转换模块,其中每一路数据由一片ADS5102芯片进行模数转换。ADS5102是一种低功耗 CMOS工艺的10位模数转换芯片,要求差分输入,转换速率可达60 Ms/s,它具有灵敏的供电系统,提供了断电模式,在此模式下功耗仅为336μW[4]。本例利用 THS4501差分放大器驱动模拟输入的电路如图3所示。
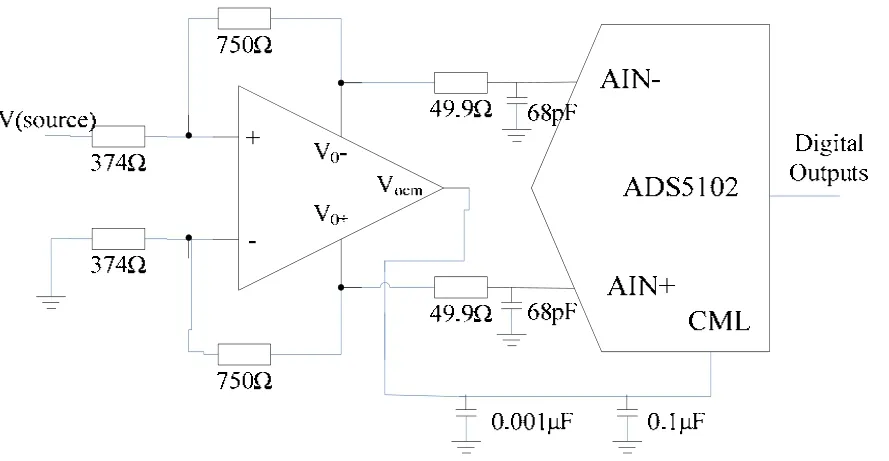
图3 差分放大器驱动ADS5102模拟输入电路
模数转换模块由M个上述电路并联组成,通过多路同步采集获得各个阵元的实时数据,生成数字信号。
3.3 DOA计算模块
在所有利用空间谱估计技术来实现对波达方向(DOA)估计的方法中,MUSIC算法在对非相干信号源分辨测向方面具有高精度和高分辨率特性,被广泛地应用于测向、通信、雷达等领域[5]。因此,本系统以MUSIC算法作为实用化改进的基础方案,构建波达方向(DOA)计算的处理过程。
标准的 MUSIC算法包括三个主要步骤:(a)对阵列接收到的信号向量X(t)求其自相关矩阵R;(b)对R进行特征值分解,构造信号(噪声)子空间,得到空间谱函数 Pmusic(θ);(c)对Pmusic(θ)进行谱峰搜索[6]。这三个步骤中,第一步和第三步属于加乘规则运算,易于用FPGA实现,而第二步是不规则运算,很难用FPGA实现,故还需对第二步进行实用化改进。

式中:
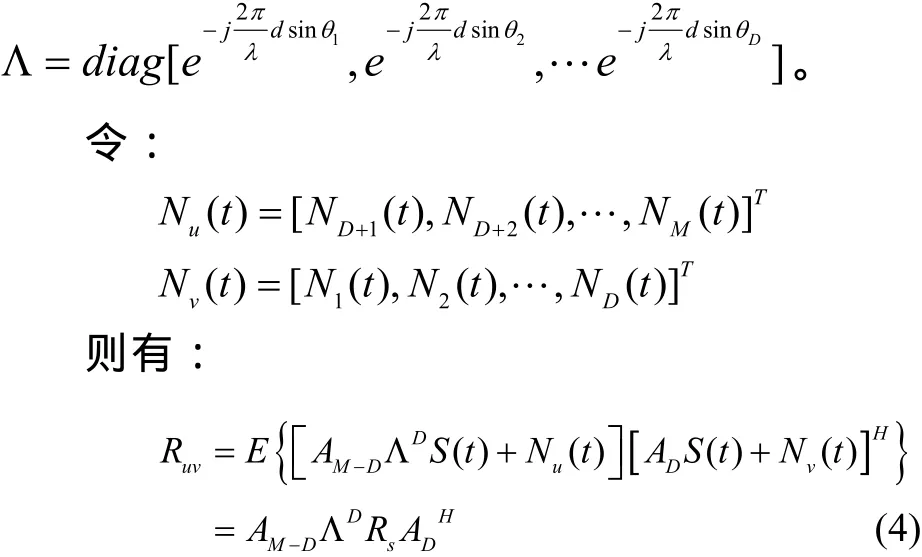
式(4)表示Ruv的列向量组能由AM-D的列向量组线性表示,当D<M-D时,只要D个信号分别从不同方向入射,则有的秩为D,而rank()=rank(Rs)=D,故Ruv的列向量组和AM-D的列向量组张成同一子空间,该空间是由M-D维的信号向量张成的信号子空间[7]。
故经实用化改进后的 MUSIC算法步骤为:(1)计算采样自相关矩阵的(M-D)×D 阶子矩阵Ruv;(2)对Ruv的列向量标准正交化,所得列向量构成的矩阵记为U;(3)对空间谱函数(θ)进行谱峰搜索,对波达方向θ作出估计。
4 系统的软件设计
依据经实用化改进后的 MUSIC算法,信号处理模块便可细分为三个小模块,分别对应算法的三个步骤,以第一个小模块“计算采样自相关矩阵的(M-D)×D阶子矩阵Ruv”为例说明程序流程,图4是其硬件框图。
在微控制单元的控制下,经模数转换模块送来的数据首先进行数据缓冲存储,然后由多路选择器选择相应的待运算数据送至数据处理单元,各数据处理单元计算得到的结果汇总至输出接口电路,然后将结果数据输出到下一个程序模块。需要说明的是,图中乘法器与累加器组成的数据处理单元仅是多个并行处理单元中的一个代表,其余单元没有画出,其数量可根据对处理时间的需求来设置,理论上来讲数量越多,程序的并行化程度越高,计算速度越快。
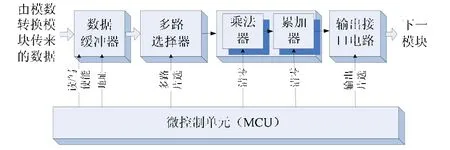
图4 采样自相关矩阵子矩阵硬件框图
5 结束语
本文在空间谱估计理论的基础上设计了一套基于FPGA的水声信号检测系统,用于DOA估计数据处理,该系统采用了模块化的设计方法,具有可扩展性。文章描述了系统模型、框架结构和模块划分,特别针对 MUSIC算法进行了实用化改进,使其能顺利应用于FPGA芯片中。本系统对长期工作于水下的信号检测系统设计有一定参考价值。
[1]U.Meyer-Baese. Digital Signal Processing with Field Programmable Gate Arrays, Third Edition.Springer, 2007.
[2]Clive “Max” Maxfield. The Design Warrior’s Guide to FPGAs Devices, Tools and Flows.Elsevier(Singapore) Pte Ltd, 2007.
[3]王彦. 基于 FPGA 的工程设计与应用. 西安: 西安电子科技大学出版社,2007. 1986.
[4]刘延飞, 郭锁利, 王晓戎等. 基于 Altera FPGA/CPLD的电子系统设计及工程实践. 北京:人民邮电出版社, 2009.
[5]孟宪元, 钱伟康. FPGA嵌入式系统设计. 北京:电子工业出版社, 2007.
[6]周陬. 基于空间谱估计的无源测向技术研究. 博士论文, 华中科技大学, 2007.
[7]余继周, 陈定昌.一种 DOA估计的快速子空间算法[J].北京:现代电子技术, 2005(12): 90-92.
猜你喜欢
四川蚕业(2022年2期)2022-11-19
新高考·高一数学(2022年3期)2022-04-28
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19
家庭影院技术(2017年9期)2017-09-26
现代园艺(2017年11期)2017-06-28
未来英才(2016年13期)2017-01-13
高中生学习·高三版(2016年9期)2016-05-14
电测与仪表(2016年8期)2016-04-15
西部广播电视(2015年5期)2016-01-16
新高考·高二数学(2015年11期)2015-12-23
