SAR的海洋动力探测研究及应用浅析
2012-10-03 12:24朱敏慧
雷达学报 2012年4期
朱敏慧
(中国科学院电子学研究所 北京 100190)
1 引言
海洋时刻都在涌动着、周而复始的运动。对动力激发诸如风、水中航行体和潮汐、洋流等,造成了海表面微小尺度分布的变化,采用空间SAR遥感手段获取海洋大范围的变化信息具有明显优势。
以电磁波与海表面波浪的相互作用为基础,电磁波散射完全是由海面的小尺度拓扑结构(张力波和短重力波)和大尺度海浪的局部坡度决定。海洋动力探测是由于动力激发造成复杂的海洋现象产生了海表面粗糙度变化,海洋表面的雷达图像使我们可以确定那些直接或间接影响海面粗糙度的动态结构,包括:内波、浅滩上潮夕流、漩涡、洋流、工业排污、自然和人为海上灾害、航行中的舰船等。目前海洋遥感学者致力于将空间 SAR遥感成功地应用于海洋观察,力图解决以下问题:海洋表面扰动参数的确定(包括:近表面风速、波浪的高度和运动方向等);全球范围海洋表面状态的确定,进行气象探测和灾害评估预报;内波及大尺度海流、洋流边界的勘测和预报;海洋表面污染区域的状态和快速确定;水域的快速控制和监视,以发现行进中人工航行体,导航和海难事故监控。
本文工作是在近几年来深入研究海面微波散射特性和 SAR 的海面成像机理[1]基础上开展基于SAR 图像的海洋动力探测的探索和研究。其思路是为对 SAR的海面图像正确解译,发现和挖掘科学问题,由海洋动力学理论求解科学问题,以此研究海洋现象/动力过程的SAR图像的理论表达,进行统计和水动力分析,认识海洋现象和相应规律,建立和逐步完善预报模型,并通过仿真试验和海上试验验证,以此研究和提升SAR系统探测能力,拓展SAR的海洋观察应用。限于各方面条件约束,本文仅对内波、水下地形波和船只尾迹的基本概念、主要的 SAR成像特征和物理参数反演等作一简要阐述。
2 内波探测研究
海洋随机多变,在众多复杂的海洋现象中,内波是一种中尺度自然现象,在其生成、传播、衰亡过程中其动力过程对海洋现象有着重要影响。特别是我国东南沿海和南海,内波活动更是频繁出现。对内波形成机制和时空分布的研究显得尤为重要,国内外学者往往把我国南海的吕宋海峡区域作为研究内波的典型案例。
大幅度内波在传播过程中产生的扰动可导致海水强烈幅聚和突发性的强流,它们的剪切效益有可能对海洋工程、石油钻井平台和海底石油管道造成严重危险。在1990年夏的东沙岛附近,当内孤立波经过时,石油钻井机难以操作,瞄定的油罐箱在不到 5 min内摆了110°[2];安德曼海的一个石油钻井机曾遭内波袭击被推移了90°,挪动了30.48 m[3]。因此海洋工程设计和实施时必须考虑内波的影响。
大振幅的内波也可能对水下潜艇航行时造成灾难性后果。人们一直怀疑1969年美国“长尾鲨”号核潜艇的失事可能由于振幅为100 m的内孤立波使其迅速下沉到超过可承受深度造成的[4]。
内波会改变声信号在海水中传播路线,直接影响水声信道,内波产生的强烈流场会影响水下武器的发射以及水下声呐的通讯和探测。
内波在陆架区的破碎引起海水的垂直混合,将底层富含营养盐的海水带到表层,给浮游动植物提供营养,这给海洋渔业起到积极作用。此外内波中存在的非线性现象也是一个良好的非线性理论研究对象。因此对内波的探测在保护、开发和利用海洋资源方面、海洋工程和军事安全等方面都具有非常重要的应用价值。
2.1 海洋内波探测现有物理基础
内波发生的机制复杂,海域层化结构、海底地形地貌以及扰动源的激励是产生内波的必要条件。它的能量巨大,出现区域相对固定,且最大振幅出现在海面以下,几乎不引起表面高度的变化。
大量的实验和理论研究表明,SAR对海洋内波的成像主要通过以下3个物理过程[5,6]:内波传播引起海表层流场发生辐聚或辐散效应;变化的表层流与风致海表面微尺度波之间的相互作用,该过程改变了海面粗糙度;海面微尺度波与雷达波之间的相互作用,该过程决定了海面雷达后向散射特性变化。
以上成像机理是构成 SAR海洋内波探测的现有物理基础(如图1所示)。
通常 SAR海洋内波遥感模拟模型由非线性自由长内波的KdV方程、作用量谱平衡方程和布拉格散射模型发展由来,它们分别描述SAR的海洋内波成像的3个物理过程。
2.1.1 KdV 方程 非线性自由长内波在水平方向(x方向)的传播过程可以用KdV方程描述[7-9],其表达式为

图1 内波、表面波与SAR成像关系的示意图
其中,η为内波纵向位移,t为时间,参数0,,1,,C α α β κ和ε分别为线性项(即线性波波速)、一阶非线性项、二阶非线性项、弥散项、浅水项和耗散项的系数。
内波的垂向(z方向)结构近似由无量纲结构函数Z(z)确定,在(1)不考虑平均流、(2)不考虑地球自转和(3)Boussinesq近似条件下,Z(z)满足本征值方程[10]
其中Ω为内波角频率,K为内波波数,h为海水深度,N(z)为Brunt-Väisälä频率
由于海水密度在密度跃层附近很小的范围(Δh)内变化很大,而在其它深度变化很小,因此Brunt-Väisälä频率在跃层附近有一个极大值,而在跃层以外其值很小。于是,可以假定海洋由二层理想水体构成,一个在跃层以上,一个在跃层以下。对于混合层(上层)深度为h1,底层(下层)深度为h2的二层海洋系统,式(4)-式(6)可简化为[8]
其中,Δρ=ρ2−ρ1为下层与上层海水密度之差,ρ为海水平均密度,线性波波速C0可由最低型内波的弥散关系得到
由式(7)可知,h1=h2时,α=0,此时一阶非线性项消失,二阶非线性项才需要加以考虑,一般情况下,该项可以忽略不计。由于浅水效应项的系数κ 很小,大约为−2×10−5s−1,因而该项也可以忽略[8]。
求解式(1),可得到以下稳定态孤立波解:

其中η0为内波最大振幅,内波相速度Cp和内波半振幅宽度l(此时 η=±0 .42η0)分别为
由式(7)可知,当 h1<h2时,α <0,式(11)取负号,此时的内波称为下降型内波;当 h1>h2时,α> 0,式(11)取正号,此时的内波称为上升型内波。
于是,内波传播引起的表层流在x方向上的流速可用下式表示[11]

其中,对于下降型内波和上升型内波,式(14)分别取正、负号。
2.1.2 作用量谱平衡方程 一般来说,SAR 图像上可观测到的内波,其波长大于几百米[12]。它们引起的表层流变化的时空尺度远大于海表面微尺度波的时空尺度,因此,表层流对海表面微尺度波的调制作用可用 Wentzel-Kramers-Brillouin弱相互作用理论来描述。根据这个理论,缓慢变化流场中的微尺度波能谱密度的变化满足以下作用量谱平衡方程[13,14]

其中A(r,k,t)=Ψ(r,k,t)/ω′为作用量谱,r=(x,y)为空间变量,k为微尺度波波数,S(r,k,t)为源函数,Ψ(r,k,t)为能谱密度,ω′为微尺度波的固有频率,满足以下关系:

为方便起见,在4维相空间中求解式(15)。在4维相空间中,Bragg波沿以下射线方程确定的轨迹传播,

其中ω(r,k,t)=ω′(k)+ k⋅ U(r,t)为观测频率或表视频率,U(r,t)为表层流速。
由于缓慢变化的表层流场可看作定常项U0与含时微扰项δU(r,t)之和,它所导致的作用量谱的变化也可看作是定常项A0(k)与含时微扰项 δA(r,k,t)之和,即

同时,微扰源函数S可近似表示为[5]

其中μ称为张弛率或波成长率,其倒数τr具有时间的量纲,也叫做张弛时间,它表征作用量谱受到微扰后回到其平衡点所需时间。
将式(18)-式(21)代入式(15)中,求解并只保留一阶项,可得

其中cg=∂ ω′/∂k 为微尺度波的群速度,A0(k)为其平衡作用量谱。
2.1.3 布拉格散射模型 由于SAR入射角θ为20°-70°,海面对雷达波的后向散射以Bragg散射为主,此时,正比波数 σ0为 ±2 kRsinθ 的 Bragg波的能谱密度Ψ之和,即

其中kR为雷达波数,M为散射系数,可由Bragg散射理论计算得到。假设Ψ为Phillips平衡谱形式,即Ψ ∝ k−4。由式(22)和式(23),以及作用量谱与能谱密度的关系A=Ψ/ω′,可得到[13]

其中Δσ0=为内波海面的雷达后向散射截面 σ0与背景海面的雷达后向散射截面之差,雷达视向在水平方向的投影为n方向,γ为Bragg 波群速度与相速度之比,即

将式(16)代入,可得

由上式可知,对于重力波,γ=1/2;对于表面张力波,γ=3/2。
设内波传播方向(x方向)与雷达视向的夹角为φ,如图2所示,则式(24)可表示为

将式(14)代入式(27),得到
其中x ′=x−Ct 为随内波一起运动的坐标系,正、负号分别对应于下降型内波和上升型内波。对于由海面风产生的海表面微尺度波而言,其波向与风向基本一致。因此,式(28)中的张弛率可表示为[13]
式(28)是由 KdV方程、作用量谱平衡方程和Bragg散射模型导出的SAR内波遥感模拟计算模式。
2.2 我国沿海内波时空分布
历史上,我国内波现场观测资料贫乏。自欧空局“ERS-1/2”,“EVISAT”,加拿大“RADARSAT-1/2”等等星载SAR以及机载SAR投入业务化运行后,在我国的南海、东海和黄海都观测到内波,引起美国、俄罗斯和欧洲的内波动力学专家和海洋遥感专家以及海军的高度关注。美国海军研究署科学顾问Apel称中国南海北部海域是研究非线性内波的天然实验室。
作者所在课题组结合SAR内波成像机理研究,对中国海内波的时空分布作了统计分析,收集了1994年至2004年的389幅图内波SAR卫星图像数据,图2展示了覆盖十年卫星图像的中国海内波分布图。
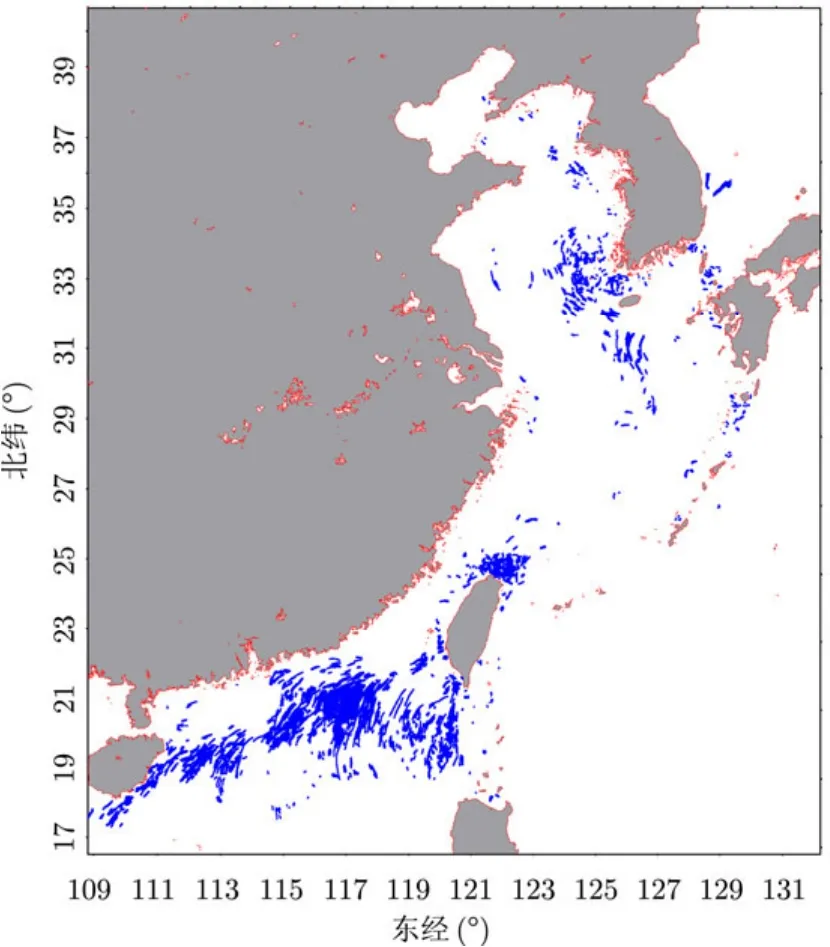
图2 十年尺度卫星图像中国海内波分布
图3分别表示对黄海、东海、台湾、东沙岛海域和海南岛海域统计全年卫星图像的内波出现概率分布,内波出现了季节性变化。由于海水密度的有效层结常年存在,只是随着季节的不同,层结的结构和深度有相应的变化。夏季海洋表面由于吸收了太阳辐射的热量,密度降低,温度要高于海洋下层,内波出现主要集中在夏季,占有70%;冬季发生很少,春季和秋季为过渡周期,分别出现18%和11%;在冬季期间,因为海表面热量大量散耗,层化结构下移,密度跃变率减小,会造成内波出现概率减小。
2.3 海表面风是影响内波成像的一个重要因素
内波的波长、波高、波动周期和能量都分布在很宽范围内,根据中欧对地观察合作的龙计划基于SAR遥感的我国沿海内波观察研究项目[14]报告,对南海北部海域作了分析研究,内波传播速度在 0.3 m/s到 3.0 m/s范围,内波幅度在2 m到170 m范围内。同时又收集了2000年至2007年间平均风速资料,图4和图5所示可以说明从4月到9月平均风速在6.5 m/s左右,10月到次年3月平均风速在9.5 m/s,由此可以看到内波被观察到的可能性的季节性原因还同风速有很强的关联。在高的风速条件下,由于SAR的信噪比低,内波信号太弱,这也是冬季难以被观察到的一个原因。
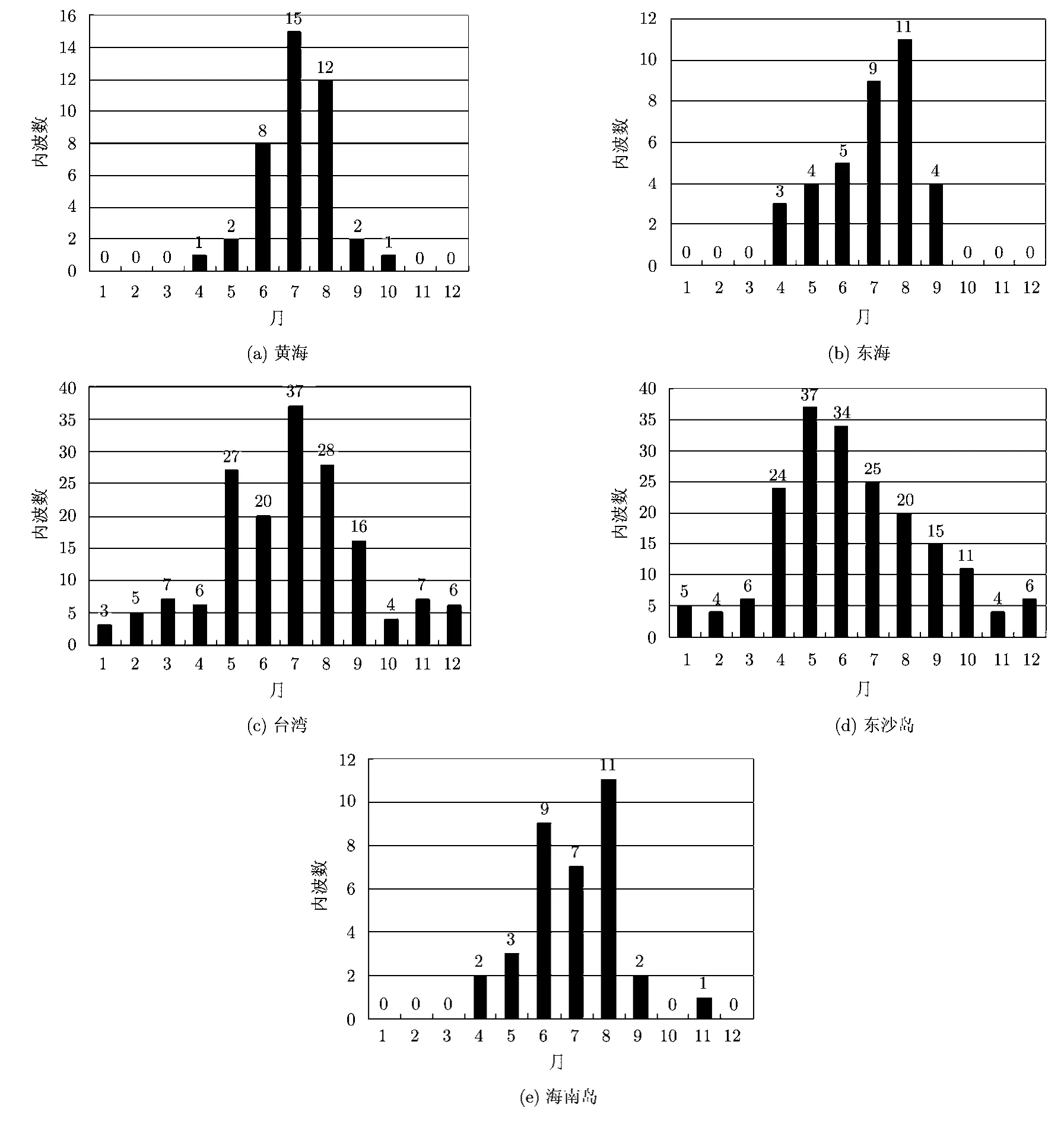
图3 我国黄海、东海、台湾、东沙岛海域和海南岛海域内波按月份时空分布
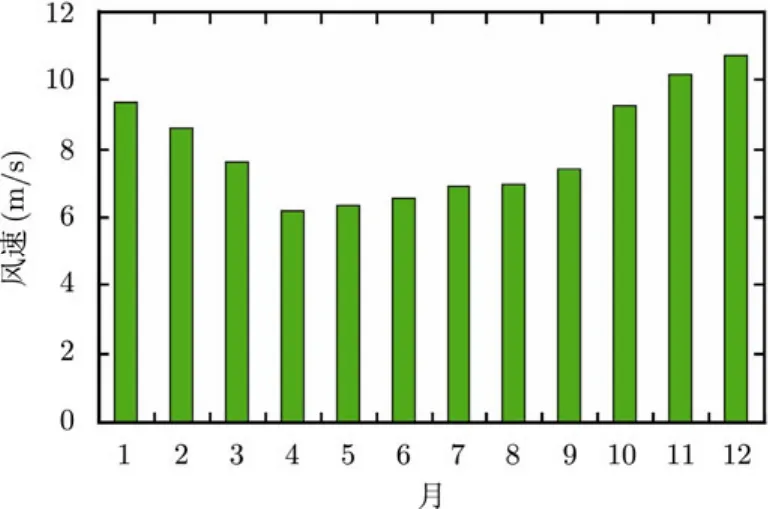
图4 南海北部海域按月份平均风速分布
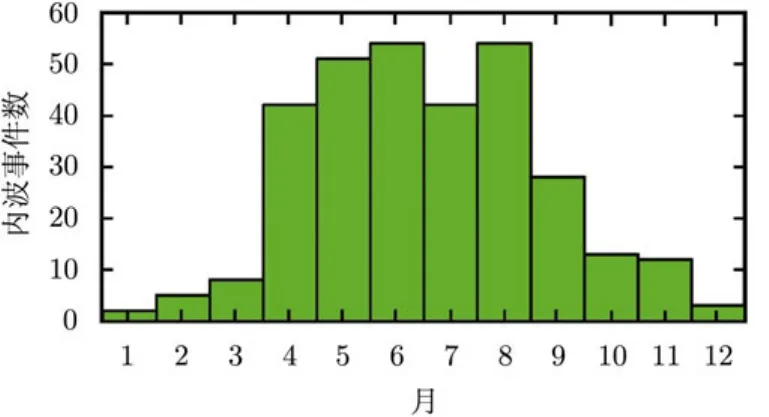
图5 南海北部海域按月份出现内波事件情况
2.4 内波参数估计
作者所在的课题组在“十五”期间开展了大规模海上试验,利用电子所研制的机载SAR获取了很多宝贵试验数据,特别是获取了难得可贵的时间序列的内波图像,促进了内波成像特性和传播特性的研究,对有关SAR图像内波探测研究[16]作了详细阐述:
(1) 开展内波SAR成像机理研究,研究激励机制和传播特性,研究海洋环境参数、雷达参数对SAR成像的影响;
(2) 开展内波参数反演研究,从SAR图像中提取内波波长、波向、相速度和振幅等参数。
图6 是1998年6月12日ERS-2一幅我国南海区域 SAR图像,展示了亮暗条带分别代表内波的波峰和波谷。由式(28),式(29),内波的波长、传播速度、传播方向、位置和成像时间都能够从SAR图像中估算出来。图7 给出它的内波在传播方向的强度表达。
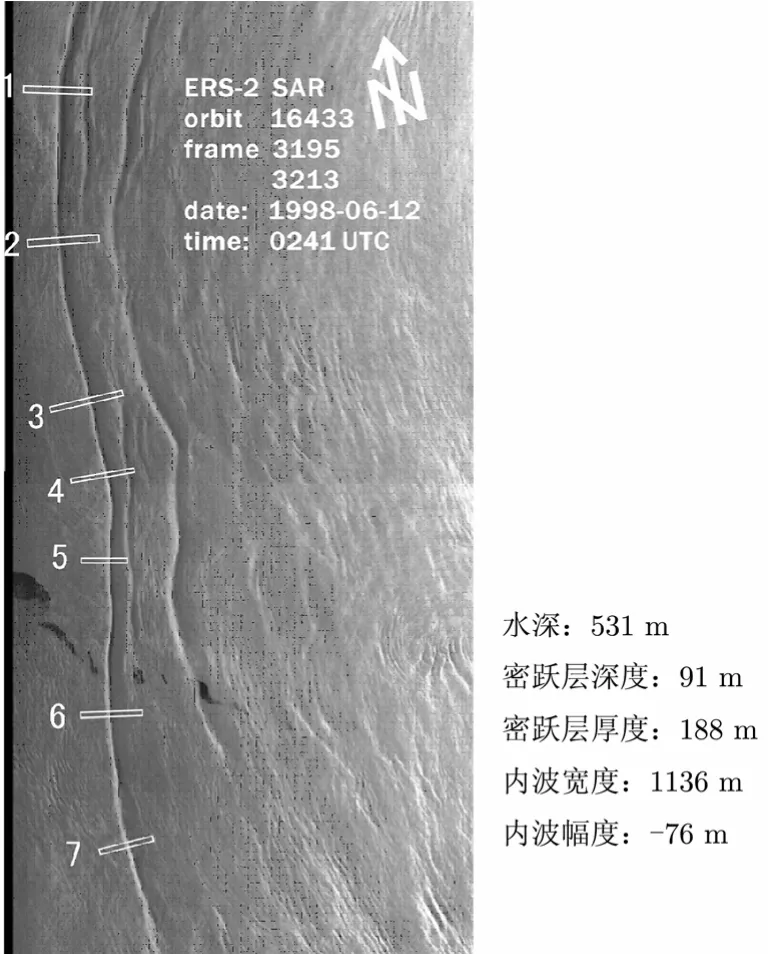
图6 典型内波SAR图像
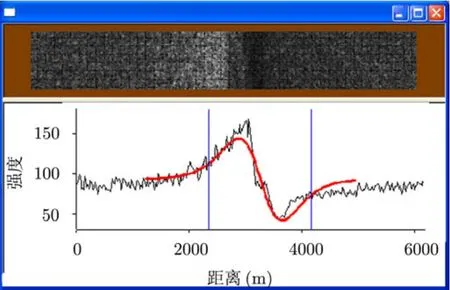
图7 单包内波传播方向强度
3 水下地形探测研究
水下地形和水深是海洋环境一个重要要素。水下地形的探测对于海上油气勘探和开采、海上交通运输和海洋捕捞、海底管道与光缆铺设、经济和军事活动等都有着重要意义。自美国Seasat入轨以来,许多国家都相继开展了星载 SAR水下地形探测研究,其中有Alpers和Hennings提出了SAR水下地形探测理论模型和应用解译。由于海洋中有许多不确定复杂因素,事实上,难以用一个完善模型来精确描述海面现象的雷达后向散射过程。目前得到公认的是流经水下地形的潮流对海表面微尺度波的动力调制是SAR水下地形成像机理,主要通过以下3个物理过程:
(1) 潮流与水下地形之间相互作用,引起海表层流场发生辐聚或辐散效应;
(2) 变化的表层流与风致海表面微尺度波之间的相互作用,该过程改变了海面粗糙度;
(3) 海面微尺度波与雷达电磁波之间的相互作用,该过程决定了海面雷达后向散射特性变化。
以上成像机理是构成 SAR浅海水下地形探测的现有物理基础。将雷达后向散射截面与水下地形通过大尺度波流相互作用联系起来构成仿真模型不在此赘述。
如图8所示,海底地形改变了海洋中流场分布,会间接地对海面粗糙度产生影响,从而在SAR图像上显示亮暗间隔灰度不同的图像。南海吕宋海峡区域内波在不同季节各异形态同时也是它的水下地貌特征造成的最佳说明。
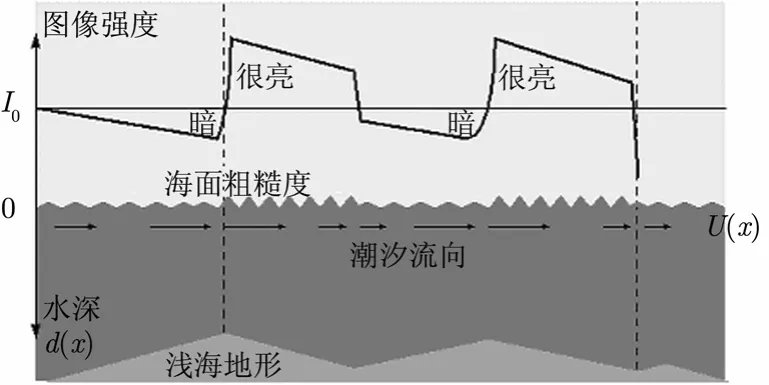
图8 海底地形映射在图像上强度分布
下面是Zheng Quanan提供的一个案例[17],图9为1995年6月3日ERS-1的台湾海峡南部浅滩图像,成像时浅滩潮流流向由西南向东北为45°,流速为 0.7 m/s,海面风向与潮流流向一致,风速 2.3 m/s。
图10给出了反演结果,可以看到浅滩高低不等,地形复杂,散布着数以百计的沙波,沙波宽度和长度各异,水深最浅不到20 m,深处也有100 m。
4 水面舰的探测研究
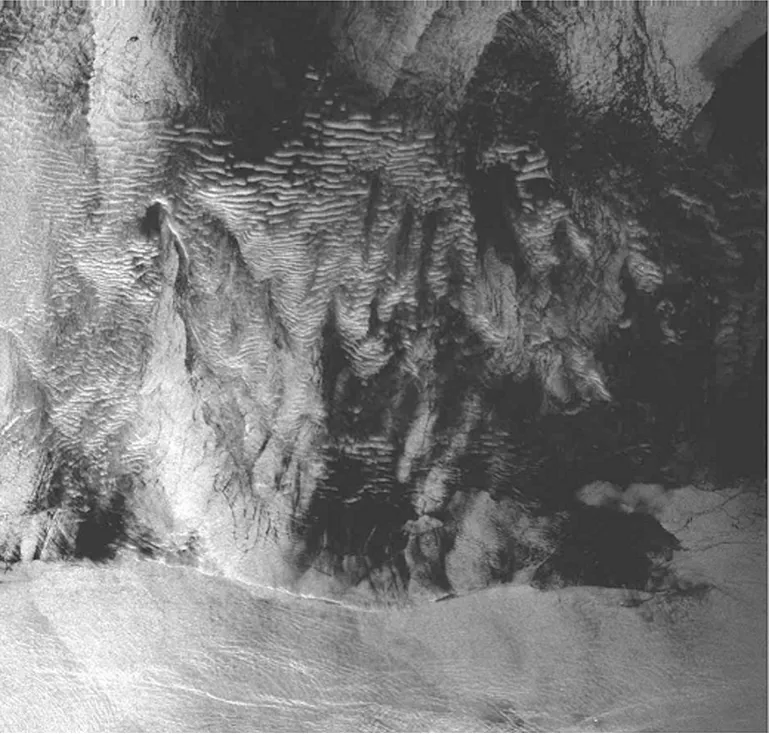
图9 台湾浅滩SAR图像
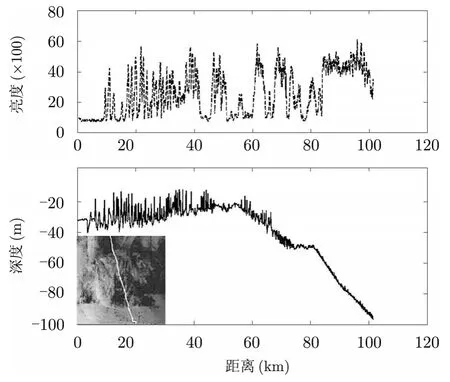
图10 台湾浅滩水深反演示例
水面船只航行会引起开尔文波、湍流、波浪破碎等水动力扰动,在海水密跃层较浅的情况下还会引起内波现象。水面舰尾迹分布范围广、持续时间长,含有丰富的目标几何特征和运动参数信息。由于尾迹的水面表征包含水面舰的主要运动状态(包括匀速、变速、变向运动)、扰动类型(体积效应,推进器效应等),主要航速范围和参数范围,以及包含主要的海洋环境条件(包括风速和背景波浪场)信息,因此研究SAR系统对海洋观察应用,从SAR图像中提取尾迹信息是对行进中的人工航行体的检测和识别的最好选择。
4.1 水面舰尾迹的类型
水面舰的尾迹是典型分布目标,航行中对周围水介质的扰动表现为多种形式,如:船体行进引起海水的分流和并流、推进系统对水的喷射和拍打、引起内波振荡和声波等。舰船尾迹的特征取决于船体类型及其运动参数和海洋环境物理要素。在不同的条件下,运动船只的尾迹特征有多种表现形式,可以分为3大类:(1) 船产生的表面波;(2) 湍流或涡流尾迹;(3) 船产生的内波。光学和SAR遥感手段都能观察到。但唯有船产生的表面波中另一种子范畴即短波,直接被 SAR通过布拉格散射成像看见,这是 SAR固有的特征,有别于光学图像,在SAR图像中表现为窄V尾迹。舰船尾迹主要分类及特征在表1中作了简要归纳。
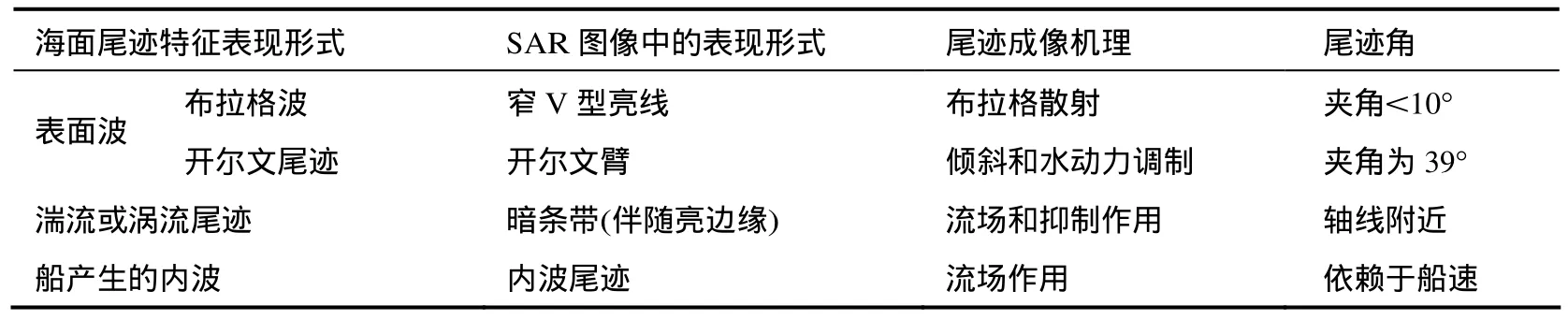
表1 舰船尾迹分类及特征
4.2 尾迹的成像特征
海浪是尾迹赖以存在的背景,通常舰船尾迹散射系数的反差在 SAR图像上表现明显,为了研究SAR图像上对舰船运动状态判断和参数提取方法,有必要从尾迹形成机理出发,深入分析尾迹在SAR图像上表现特征,以获取影响这些特征的各类要素的定量关系,下面仅仅是概要描述各类尾迹主要特点。
4.2.1 开尔文尾迹 开尔文尾迹波属于长重力波,是水中运动体常见的一种“V”型尾迹,“V”的二臂呈“胡须”状,构成分歧波,夹角为恒定的39°,尖头波具有最大的幅度,位于尾迹角19.5°的两条线头部。开尔文尾迹的表面起伏最大的区域位于船迹两侧尾迹角 16°≤β≤19.5°内,如图 11。在风速介于 3 m/s和10 m/s可被SAR发现,如图12所示。
从SAR图像上舰船速度反演,当船速Us沿−x传播方向航行,产生的“自由”表面波沿着与x轴夹角为φ的不同角度传播,尾迹波高可描述为这些平面波的叠加[18]:
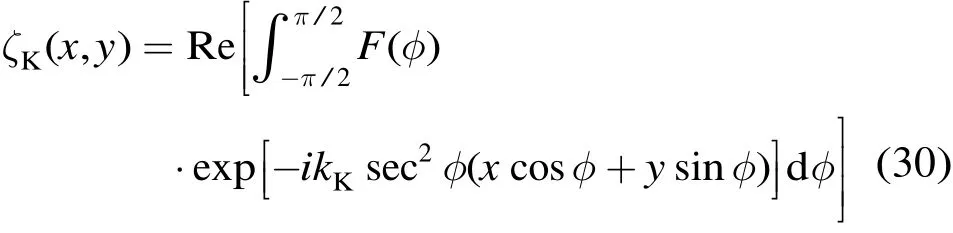
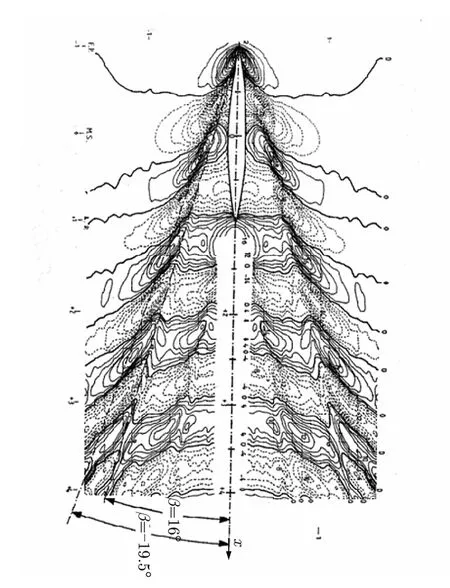
图11 开尔文尾迹分布
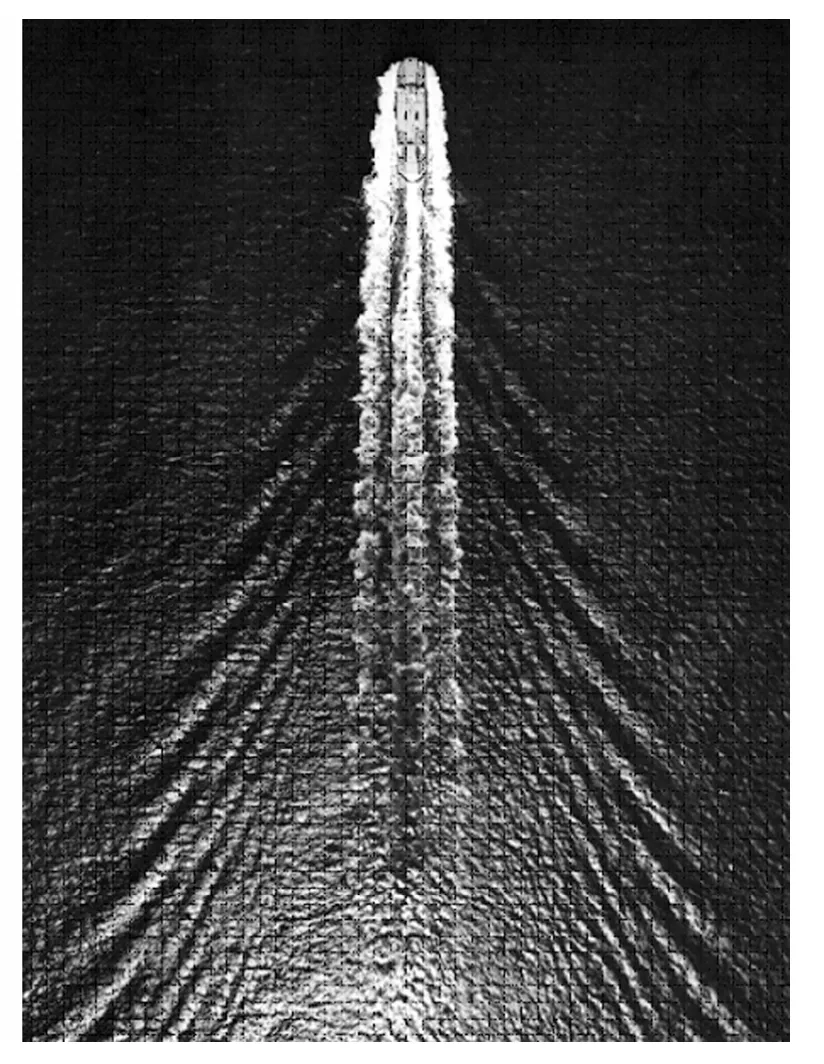
图12 开尔文尾迹SAR图像
其中,kK(φ)[ x cos φ+y sin φ]是相位函数,kK(φ)=kK⋅sec2φ是沿着与 x轴夹角φ传播的波分量的波数,Re[ ]表示取实部,F(φ)是复数值,表示船的特征参数。
尾迹的相速度和波长为
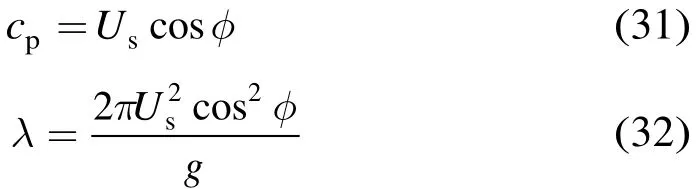
可以看到开尔文尾迹波高与船体结构、排水量和吃水深度有关,尾迹波波长与船速度成正比。
4.2.2 湍流尾迹 湍流尾迹是由船体和推进器对船后周围水体扰动产生短波的会聚和发散造成的,船后十分庞大的圆锥水体在海面上的映波,时间持久范围广大。图13为湍流尾迹生成示意图,湍流抑制了海面表面波的高频分量,减少了雷达后向散射,在SAR图像上显示长长的暗条,有时会延伸几十公里,在风速介于3 m/s和10 m/s之间时可被SAR发现,图14所示,有时伴随的亮臂可能是船体推进器造成的涡流引起的。
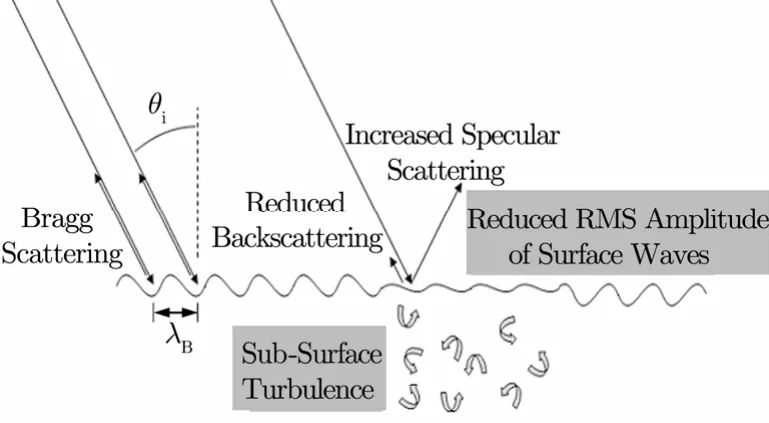
图13 湍流尾迹生成示意图
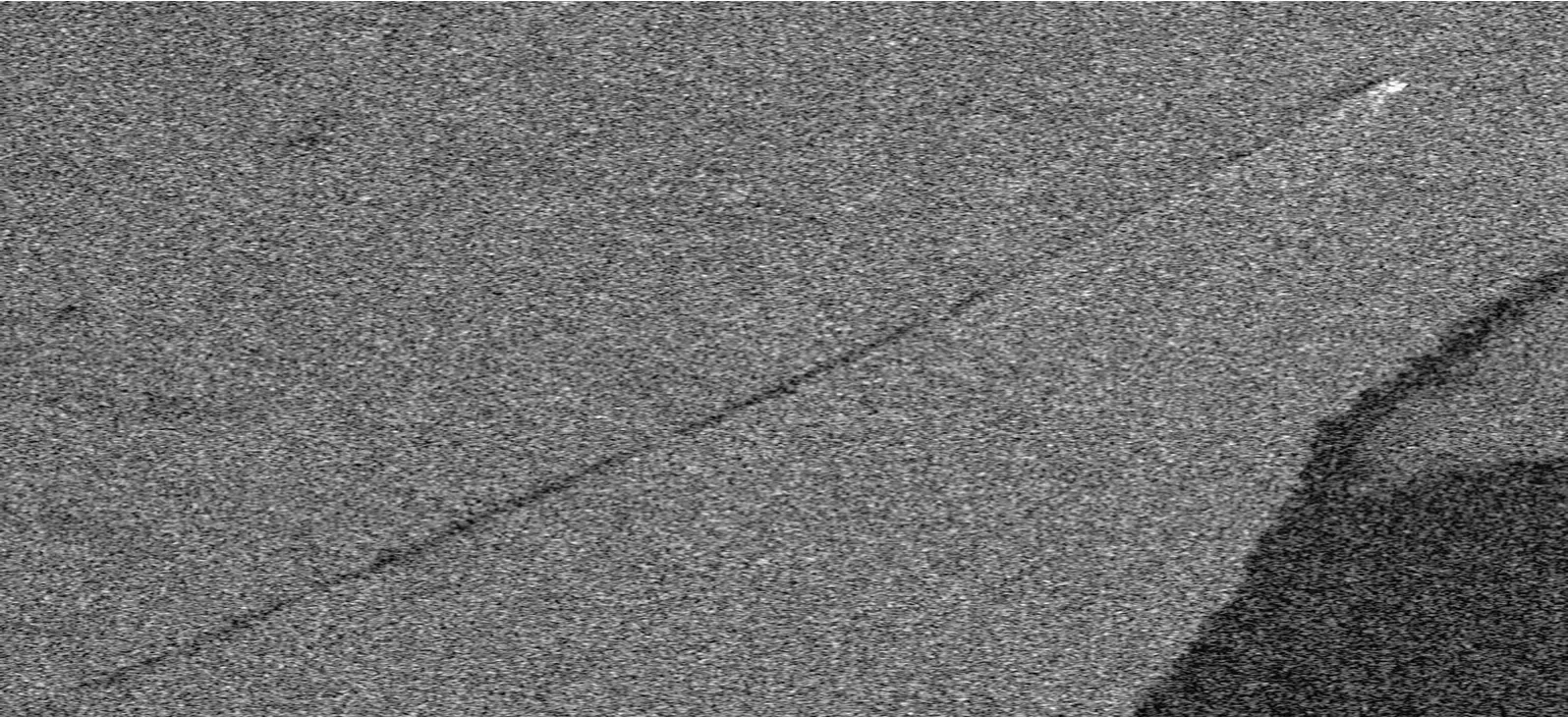
图14 湍流尾迹SAR图像
然而当船体具有沿着雷达照射方向的速度分量时,湍流尾迹是较稳定的,几乎不会在SAR图像中偏移,所以相对于雷达具有径向速度分量运动的舰船似乎离开了其尾流。如果船的速度分量指向雷达,则船只看上去在雷达运动的方向上发生了移动。因此根据船的强反射点偏移湍流尾迹轴线的距离可以反演出船速。
4.2.3 窄V尾迹 窄V尾迹主要是船体扰动引起的短布拉格共振纹波所致。随着船向前航行,会在每个点都辐射出一列环形波,其几何描述如图15。
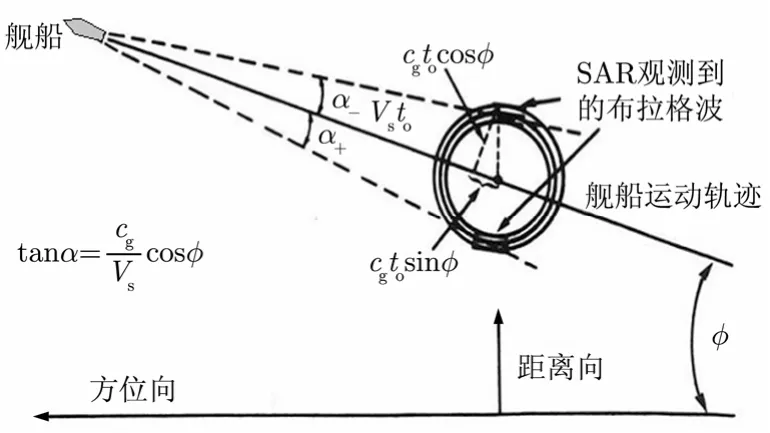
图15 窄V型尾迹波模式图
每个散射中心的波以它们的群速度沿着辐射线向外传播,因此雷达可以在相对于船的航行轴的任何视线角检测到这种短波,由于长波比短波传播的速度快,因此处于长波和短波之间某一位置的波长为λB的波会与雷达信号发生布拉格共振,共振点沿着雷达照射方向分布于环形两侧,随着离船距离的不同,这些共振点沿着两条直线分布,直线夹角与船的速度、雷达频率、雷达入射角和雷达与船的相对方向等因素有关。

尾迹角决定于短波群速度与船速的比,即其中cg是布拉格波的群速度。它要求海面平静,在风速小于3 m/s时可被SAR发现,如图16所示,因此一般不多见。
4.2.4 内波尾迹 内波尾迹与海水层化结构有关,其主要特征是表面流场速度大,而波幅很小。当有强的浅的密度跃层存在时,水面舰船船体的位移或船体产生的涡流会产生内波尾迹。内波尾迹引起的表面粗糙度特征为一对对相邻的非常粗糙和光滑条纹,在相应的雷达图像均匀背景上出现一对对相邻的明暗条带,尾迹很长,如图17所示。在每个水平面内的内波尾迹具有相同形状,但幅度随着深度变化。
当水深一定时,随着密度跃层的深度不同,所得到的内波尾迹的强度和夹角也有所不同,按照线性理论,内波的传播速度为

则内波尾迹夹角β与舰船速度Us之间的关系为

从上所知,深入研究航行中的舰船尾迹生成机理、尾迹与海洋背景相互作用、雷达发射的电磁波对海表面波流调制的3个主要物理过程,是完整理解和解译舰船尾迹的SAR图像特征,建立对舰船尾迹检测和识别的依据。
5 结束语
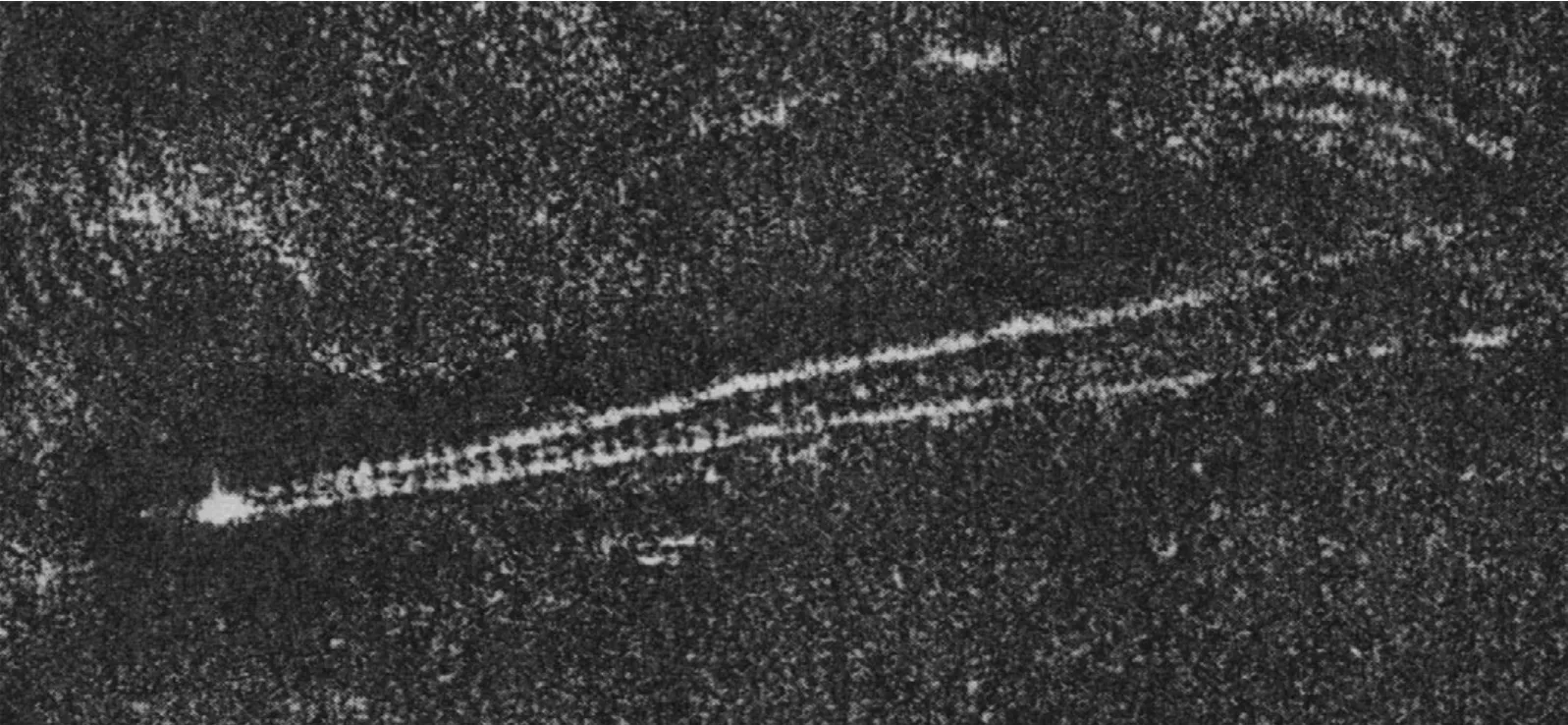
图16 窄V型尾迹SAR图像

图17 舰船内波尾迹SAR图像
以遥感作为技术基础的对地观测系统在经历了四十余年的磨砺之后已跨入了一个崭新的时期,海量数据的不断积累,技术的不断进步、新的创新不断涌现,成就了今天遥感对地观测在全世界的辉煌。以数以千计的卫星和飞机作为平台,载着各种先进观测设备对地球进行着全面的观测。其中作为微波主动遥感器的 SAR以其独特优势成为其中不可替代的重要手段,它们观测的尺度从宏观的全球到局部的细节,观察周期从全球动态季节变化到瞬态突发事件抓捕,所获取的数据对人类认识地球,探索和拓展发展空间,掌握全球动态变化,提高对解决社会进步决策的科学性,保障国家安全发挥了重大作用。
进入21世纪以来,在陆地有限资源的利用已经接近极限,人类赖以生存基础遭到极大危机之际,以开发和占有海洋资源为核心成为国家政治经济活动焦点。海洋是地球上最主要的未充分开发利用的资源宝库,一方面海洋与气候变化研究、海底动态与地震研究、海洋生态系统研究等全球尺度海洋大科学研究是必要的重之重,另一方面海洋生物技术和深海技术等海洋高技术领域快速发展,一些发达国家的深潜技术突破了万米,我国“蛟龙号”载人潜水器也在今年下潜 7000米级海试,海洋立体监视、监测能力受到极大重视,正在致力于覆盖全球大洋。
根据国家海洋科学和技术发展规划,组成以可见光、红外探测水色水温为主的海洋一号水色卫星;以微波探测海面风场、海面高度和海温为主的海洋二号动力环境卫星和以多光谱成像仪、合成孔径雷达、微波散射计、辐射计、雷达高度计等多种遥感器为主载荷的海洋三号环境综合卫星;以及地面应用系统和海上辐射校正与真实性检验试验场为规模,形成以我国海洋卫星为主导的主体海洋空间监测,期待着 SAR的动力探测研究取得丰硕成果,在海洋经济、维护海疆主权和权益中发挥重要作用。
[1]余颖,朱敏慧.海面微波成像和雷达遥感体制研究[M].中国教育发展(香港)基金出版社,2009.Yu Ying and Zhu Min-hui.The System Research of the Sea Surface Microwave Imaging and Radar Remote Sensing[M].China Education Development (H.K.) Foundation Publishing House,2009.
[2]蔡树群,甘子钧.南海北部孤立子内波的研究进展[J].地球科学进展,2001,16(2): 215-219.Cai Shu-qun and Gan Zi-jun.Progress in the study of the internal solution in the Northern South China Sea[J].Advance in Earth Science,2001,16(2): 215-219.
[3]Osborne A R and Burch T L.Internal solutions in Adaman Sea[J].Science,1980,208: 451-460.
[4]方欣华,杜涛.海洋内波基础和中国海内波[M].青岛: 中国海洋大学出版社,2005.Fang Xin-hua and Du Tao.Fundamentals of Oceanic Internal Waves in the China Seas[M].Qingdao: China Ocean University Press,2005.
[5]Alpers W.Theory of radar imaging of internal waves[J].Nature,1985,314(6008): 245-247.
[6]Thompson D R and Gasparovic R F.Intensity modulation in SAR imaging of internal waves[J].Nature,1986,320(6060):345-348.
[7]Lamb K G and Yan L.The evolution of internal wave undular bores: comparisons of a fully nonlinear numerical model with weakly nonlinear theory[J].Journal of Physical Oceanography,1996,26(12): 2712-2734.
[8]Liu A K,Chang Y S,and Hsu M K.Evolution of internal waves in the East and South Sea[J].Journal of Geophysical Research,1998,103(4): 7995-8008.
[9]Holloway P E,Pelinovsky E,Talipova T,et al..A nonlinear model of internal tide transformation on the Australian North West Shelf[J].Journal of Physical Oceanography,1997,27(6): 871-896.
[10]Phillips O M.The Dynamics of Upper Ocean[M].Cambridge University Press,1977.
[11]Zheng Q and Matis J H.Some applications,properties and conjectures for higher order cumulants of a Markovian stepping-stone model[J].Communications in Statistics:Theory and Methods,1993,22(12): 3305-3319.
[12]Liu A K,Holbrook J K,and Apel J R.Nonlinear internal wave evolution in the Sulu Sea[J].Journal of Physics Oceanography,1985,15: 1613-1624.
[13]Hughes B A.The effect of internal waves on surface wind waves 2 theoretical analysis[J].Journal of Geophysical Research,1978,83(C1): 455-464.
[14]Alpers W and Henning I.A theory of the imaging mechanismof underwater bottom topography by real and synthetic aperture radar[J].Journal of Geophysical Research,1984,89(C6): 10529-10546.
[15]Huang Weigen,Johnny Johannessen,and Werner Alpers.Spatial and temporal variations of internal waves in the Northern South China Sea SeaSAR[C].2008.
[16]种劲松,欧阳越,李飞,等.合成孔径雷达图像海洋内波探测[M].北京: 海洋出版社,2010.
[17]Zheng Q A,Li L,Guo X,et al..SAR imaging and hydrodynamic analysis of ocean bottom topographic waves[J].Journal of Geophysical Research.DOI:10.1029/2006JC003586,2006.
[18]Oumansour K,Wang Y,and Saillard J.Multifrequency SAR observation of a ship wake[J].IEE Proceedings-Radar,Sonar and Navigation,1996,143(4): 275-280.
猜你喜欢
电子设计工程(2022年12期)2022-06-29
红蜻蜓·低年级(2021年2期)2021-07-20
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
小学科学(2020年6期)2020-06-22
辽河(2019年7期)2019-09-03
北京航空航天大学学报(2017年2期)2017-11-24
太空探索(2016年5期)2016-07-12
时代英语·高三(2014年5期)2014-08-26
舰船科学技术(2013年3期)2013-03-08
小星星·阅读100分(低年级)(2009年12期)2009-01-25