喷码机油墨压力的模糊PI控制系统设计*
2012-12-07 06:05覃举存朱国魂
传感器与微系统 2012年4期
覃举存,朱国魂,姜 茜
(桂林电子科技大学计算机科学与工程学院,广西桂林541004)
0 引言
喷码机是一种广泛应用于工厂流水线上打印产品标识的一种喷印设备。喷码机油墨压力的稳定对于喷码机的喷印质量起到至关重要的作用[1]。传统的油墨压力控制系统主要是由模拟电路搭建起来的,其控制参数不易调节,压力调节时间过长,存在压力损耗问题,且喷印过程中设备的抖动,油墨阀门闭合变化带来的扰动,控制对象参数的变化,抗干扰能力不强,往往使得系统稳定性下降。
模糊控制与常规PID控制器相比具有无需建立被控对象的数学模型,对被控对象的时滞、非线性和时变性具有较强的适应能力,对干扰和噪声具有更强的抑制功能[2]。常规的二维模糊控制一般是按系统偏差和偏差变化率来实现对过程的控制,具有比例—微分的控制作用而不具有积分的控制作用,因而使得它在消除系统误差方面欠佳,难以达到较高的控制精度。其主要原因是当系统响应进入稳态值附近时,模糊控制器输入变量e与ec在模糊集合上的投影为零,使得模糊控制进入调节盲区[3]。PI控制器具有积分的控制作用,能够消除控制系统的稳态误差。为了弥补模糊控制器在平衡点附近的盲区缺陷,提高模糊控制精度,将PI控制引入到模糊控制器中构成优势互补的模糊PI复合控制器[2,3],从而可以有效地改善模糊控制器的稳态性能。考虑到油墨压力控制时滞性的特点和稳定性的要求,采用模糊PI双模控制器以解决油墨压力的控制问题。
1 控制对象特性
喷码机供墨系统内部结构如图1所示,它主要由油墨泵、压力传感器、控制阀门及供墨管道等部件构成。油墨在油墨泵的带动下在内部管道形成墨流回路,在墨路导向阀门的控制下经过供墨管道对喷头施加压力,使得油墨能够从喷嘴喷射出来最终形成墨线。其控制特性主要有:
1)时滞性:油墨供墨管道一般为2~4m,油墨在管道的流通会造成传输时延。
2)扰动性:阀门开关的闭合,油墨稠度的变化和打印喷头的抖动都会给压力控制带来扰动。

图1 供墨系统内部结构图Fig 1 Internal structure diagram of ink delivery system
2 模糊PI双模控制器设计
针对油墨压力控制对象的特性,设计的模糊PI双模控制器的结构框图[4~6]如图2所示。图中,R,p分别为油墨压力的设定值与实际压力值,E,EC分别为油墨压力实际值与设定值的偏差和偏差的变化率。K1,K2为模糊控制器输入量化因子,Ku为模糊控制器输出的比例因子。

图2 模糊PI控制器结构框图Fig 2 Structure block diagram of fuzzy-PI controller
模糊PI双模控制器由PI控制器和模糊控制器组成。它结合了2种控制器的优点,既提高了系统的响应速度,又能够消除系统的稳态误差。因而能够有效地对油墨压力进行控制。模糊PI双模控制器的控制策略为:当偏差E的绝对值大于设定的阈值k时,切换到模糊控制器,以获取良好的动态性能,减少系统的调节时间和超调量;反之,当偏差小于阈值k时,切换到PI控制器,以提高系统的稳态精度。
2.1 模糊控制器的设计
理论上,多维模糊控制器将会带来更高的控制精度,但是,维数越高,其控制规则越复杂,推理运算量越大,在实际应用中较少采用。因此,本设计采用二维模糊控制器,并以油墨压力的偏差E和偏差变化率EC作为其输入变量。其设计步骤如下:
1)控制器输入输出变量模糊论域与模糊子集的确立
通过对油墨压力变化特性的分析,选取油墨压力偏差E的物理论域为[-60,80],偏差变化率EC的物理论域为[-15,15]。两者经过量化因子 K1,K2变换到模糊论域{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}其 中,K1=偏差E模糊语言变量的模糊子集为{HB,HM,HS,ZO,LS,LM,LB}。其中,HB 表示油墨压力很高,HM表示油墨压力高,HS表示油墨压力有点高。LS则表示油墨压力有点低,LM和LB分别表示油墨压力低和很低。油墨压力偏差变化率EC模糊语言变量的模糊子集EC={NB,NM,NS,ZO,PS,PM,PB}。控制器输出变量 U 的模糊论域为{-10,10},经过量化因子Ku变换到物理论域[0%,90%],其输出量为PWM的占空比例系数。模糊子集为{NB,NM,NS,ZO,PS,PM,PB},NB 为负大,NM 为负中,NS为负小,ZO为零,PS为正小,PM为正中,PB为正大。
2)隶属函数的选取
为了便于模糊控制算法实现和实用性方面的考虑,模糊控制的输入输出变量E,EC,U选用三角函数和梯形作为其隶属函数,E的隶属函数曲线如图3,输出变量U的隶属函数如图4所示。
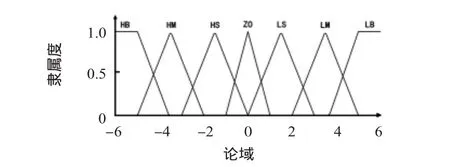
图3 输入变量E的隶属函数Fig 3 Membership function of input variable E

图4 输出变量U的隶属函数Fig 4 Membership function of output variable U
3)模糊控制规则的建立
模糊控制规则的建立主要是在操作经验的基础上进行的,它包含了现场可能出现的各种情况[6]。模糊控制规则的建立选用归纳法,其选取的原则是:当油墨压力偏差大或较大时,加大控制量以尽快消除误差;当偏差较小时,减小控制量以防止超调。例如,当EC为负时表明压力有上涨的趋势,如果此时压力高,则应当减少油墨泵的转速以降低油墨压力。用模糊条件语句表示如下:

……据此,得出如表1所示的7×7=49条规则。
2.2 PI控制
PI控制比例积分控制的控制作用,它能够有效地消除系统稳态误差。当系统偏差较小时,采用PI控制。PI的位置式离散化控制规律为
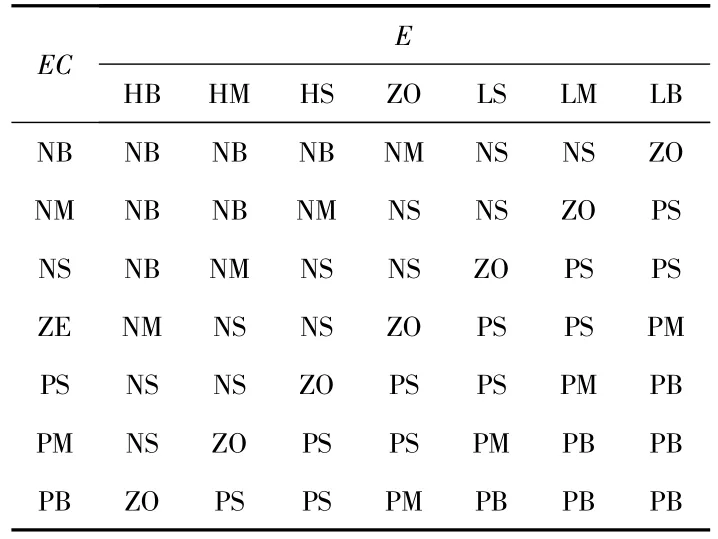
表1 模糊控制规则表Tab 1 Table of fuzzy control rule

式中 kp为比例系数,ki为积分系数,T为采样周期,k为采样序号,e(k)为第k时刻所得的偏差信号。
3 油墨压力控制系统设计
油墨压力控制系统采用Altera公司的FPGA芯片EP3C16F484为控制器核心。其系统结构如图5所示。油墨压力的模糊PI控制算法是在基于NiosII软核的SOPC系统中实现。油墨压力的检测通过压力传感器和A/D转换器来完成。其中,压力传感器主要是利用了半导体的压阻效应来实现,它是由特制的4只应变计构成惠斯登电桥,并经过特定处理后放置到油墨导管中。由惠斯登电桥的工作原理可知,当油墨压力的变化导致电桥失去平衡后将会反映到电桥两端的输出信号中,因而,通过将输出信号放大并经过A/D转换采集便可测得油墨的压力数据。

图5 油墨压力控制系统结构框图Fig 5 Structure block diagram of the ink pressure control system
实际中,压力的可测范围为0~250 bar,控制器根据采集到的实际油墨压力数据与设定的压力数据计算出油墨压力的偏差和偏差变化率。并以此作为模糊PI控制器输入,经内部推理运算后,再经过FPGA内部的PWM信号产生模块输出一个占空比可调的方波信号,其占空比由模糊PI控制器运算得出,占空比调节范围0%~90%。输出的PWM需要经过电压提升之后再经过光耦隔离电路输出作为功率管的控制信号,从而调节油墨泵电机的转速,进而达到调节油墨压力。
4 系统测试结果
将模糊PI控制器应用到油墨压力控制中,并通过与现有的油墨压力控制系统进行对比来验证其控制性能。测试中,油墨泵电机的参数为:额定工作电压为24 V,电流为3 A,流量范围为5~40 000 mL/min。实际输出 PWM频率21 kHz,占空比最大为90%,功率管最大输出电流10 A。图6是给定系统油墨压力值193 bar,并对输出信号进行采样,做图得出的系统响应曲线。其中,采样周期为0.5 s。由图可看出:设计的模糊PI控制器能够有效地对油墨压力进行控制,与现有的控制器控制效果相比,超调量较小,响应速度较快,平均调节时间缩短了7s,控制精度得到较大提升。

图6 给定压力下系统响应曲线Fig 6 Response curve of system under a given pressure
为了验证系统的抗干扰能力,在系统达到稳定压力值200bar后,通过对阀门的闭合控制使墨路发生变化,从而使得油墨压力变化,并对油墨压力输出信号进行采样。图7是系统在加入扰动信号作用下的输出曲线。由图可看出:当扰动引起油墨压力变化时,系统能够及时地对压力进行调整,在扰动发生10 s后,油墨压力回到正常值。可见系统具有较好的扰动抑制能力。
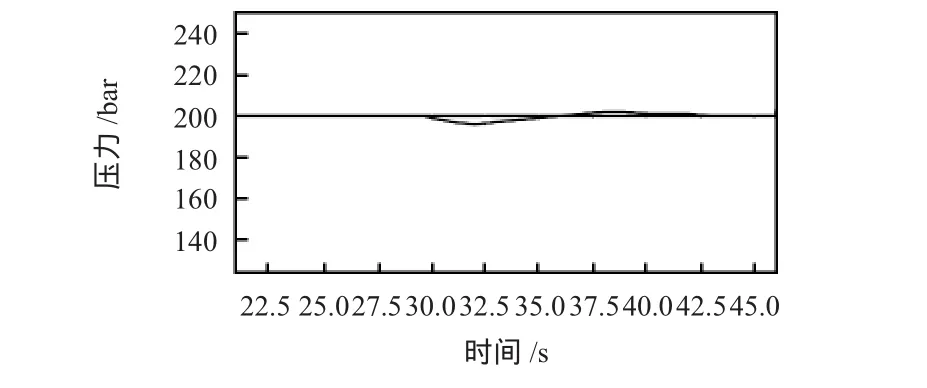
图7 扰动状态下系统输出曲线Fig 7 Output curve of the system with disturbance
5 结论
利用PI控制和模糊控制各自的优点,将PI控制与模糊控制构成优势互补的双模控制器。并将其应用到具有时滞特性的喷码机油墨压力控制系统中,仿真与实际测试结果表明:设计的模糊PI控制器能够有效地解决喷码机油墨压力控制的问题。与传统的控制效果相比,具有较快的响应速度,缩短了调节时间,其对阀门的闭合,设备的抖动带来的扰动具有较强的抑制能力。
[1]Maruschock G R.A system to analyze continuous ink jet droplets[D].Pittsburgh:University of Pittsburgh,2004:30-36.
[2]诸 静.模糊控制原理与应用[M].北京:机械工业出版社,2005.
[3]模糊控制及其 Matlab仿真[M].北京:清华大学出版社,2008.
[4]丘建峰,李亮玉.Fuzzy-PI控制器在水温控制系统中的应用[J].天津工业大学学报,2006,25(2):66-67.
[5]Muñoz-César,Merchán-Cruz.Speed control of a DC brush motor with conventional PID and fuzzy-PI controllers[C]∥Conference on Electronics,Robotics and Automotive Mechanics,Cuernavaca,2008:345-346.
[6]刘宏伟.基于单片机的模糊控制方法及应用研究[D].武汉:武汉理工大学,2007:26-33.
猜你喜欢
绿色包装(2022年11期)2023-01-09
绿色包装(2022年9期)2022-10-12
科学技术创新(2021年25期)2021-09-11
中国制笔(2019年2期)2019-11-18
中国食品工业(2018年4期)2018-06-11
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22
出版与印刷(2014年4期)2014-12-19