
火炮内膛全景图像窥测技术研究
2012-12-25 08:48傅建平王建成张丽花吴定海
弹道学报 2012年4期
傅建平,雷 洁,王建成,张丽花,吴定海
(1.军械工程学院 一系,石家庄050003;2.武汉军械士官学校 四系,武汉430075)
火炮内膛由于多次射击会出现烧蚀、磨损、裂纹、阳线断裂、严重挂铜与锈蚀等疵病,对火炮发射精度、火炮寿命和使用安全性有很大影响,射击前必须检查火炮内膛质量.本文应用半球全景成像与图像处理技术并结合火炮内膛结构特点研制了火炮内膛窥测装置,实现了内膛360°的全景环形成像[1],但所采集的环形全景图像必须展开成传统的矩形图像,以便分析处理.
1 火炮内膛窥测装置
如图1所示,火炮内膛窥测装置主要由内膛全景图像采集装置、内膛爬行装置、内膛爬行控制装置、测控计算机及电缆附件等5部分组成.该火炮内膛窥测装置在膛内爬行的方向、速度与距离可控,能以摄影与摄像方式采集内膛全景图像.
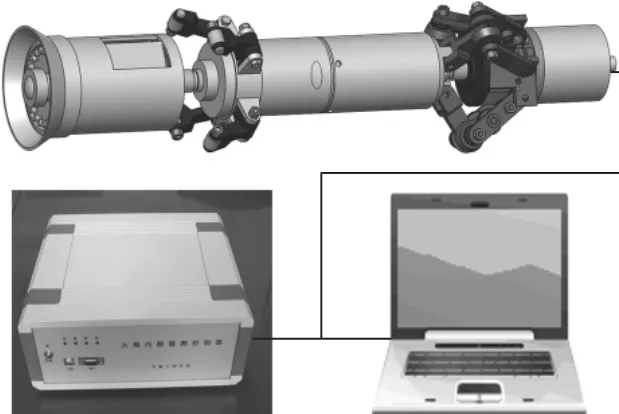
图1 火炮内膛检测装置
2 火炮内膛全景采集
2.1 半球全景镜头
图像采集部分是爬行器在爬行过程中根据需要采集火炮内膛图像的执行部分,它由半球全景光学镜头和CCD光电成像镜头2部分组成.
火炮内膛窥测装置采用的全景环形透镜(PAL)结构,如图2所示,它将围绕光轴360°范围的圆柱空间投影到二维平面的环形区域.图中P1和P3为反射面,P2和P4为折射面,L为转向透镜,它们共同作用使PAL成像在CCD传感器上.该系统沿光轴方向的视场角范围为(-α1,α2).PAL内部成像为环形虚像,在后继透镜中转换为全景环形图像[2].
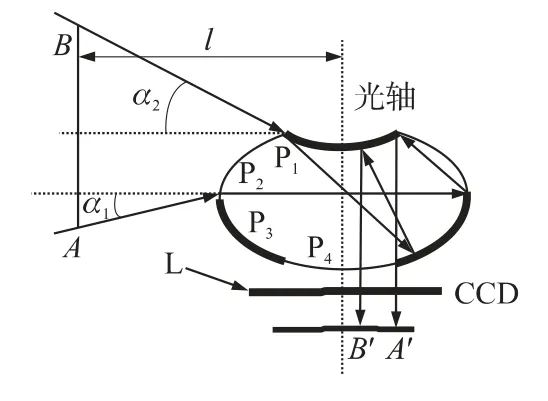
图2 PAL的结构
图3中,α角的两边绕光轴旋转360°后得到的空间区域是成像区域[3],像面上每一个同心圆对应与轴成同一角度的点的轨迹;2β角区域为盲区.

图3 平面圆柱投影法
半球全景镜头可一次得到炮膛圆周360°范围的图像,而且图像清晰,分辨率高达1mrad,适用于火炮内膛窥测.
2.2 CCD光电成像镜头
CCD将成像于半球全景镜头上的内膛图像转换成模拟电子图像.火炮口径越大,全景图像中的炮膛内壁面积越大,要求数字图像分辨率越高.本装置采用300万像素CCD镜头,在帧速为7s-1,分辨率为2 048×1 536时,采集155mm口径的火炮,像素实际尺寸高达3.2μm×3.2μm,像素分辨率完全满足内膛疵病检测需求.
图4为采用本文窥测装置拍摄得到的火炮内膛标定图像和实际内膛全景图像,每一圆周对应火炮内膛轴向不同部位的圆周景像,且沿炮膛轴向呈非线性变化.
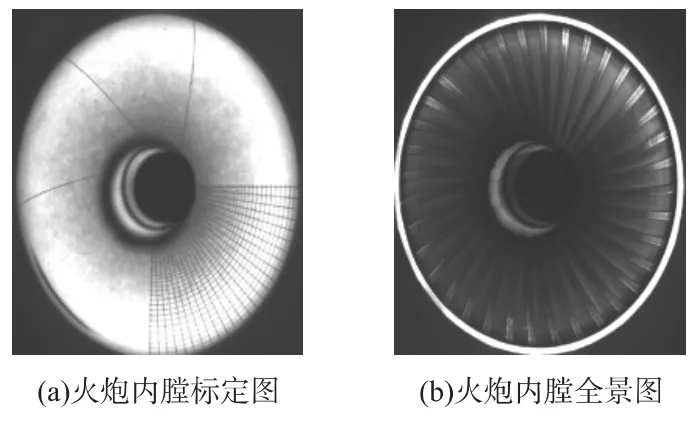
图4 火炮内膛标定和实际全景图像
3 火炮内膛全景图像展开
PAL将一个三维柱面空间成像为二维环形全景图像,对非专业人员来说,PAL图像不便于观察和测量.为此,需要研究展开算法,将环形像转换成传统矩形图像.本文提出的内膛全景环形图像展开算法分2步:径向非线性展开和切向非线性展开.
沿光轴将环形像展成矩形像的过程中会出现变形,需要采用算法尽量减小这种畸变.根据图像特点可采用不同的映射方式来控制,比如最大尺度相同、面积相同等.本文采用的映射方法是将全景图像沿其外圆周展开,并沿待转换像素与圆心的切向展开,以保持最大尺寸不变.
3.1 切向矫正
全景环形图像切向畸变主要表现为切向的弯曲,因此,切向矫正模型可根据坐标变换关系建立.假设经径向矫正转换成的圆柱面底面在u—v平面内,则切向矫正如图5所示.其中,o(uo,vo)为空间圆柱面的中心,也就是全景环形像的中心,W为基准圆环确定的图像宽度,H为圆柱面高度.
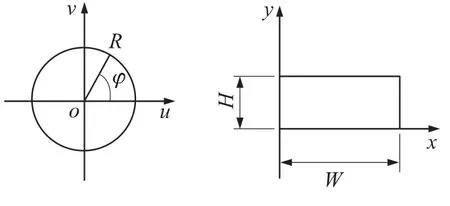
图5 切向矫正简图
根据u—v空间内极坐标与笛卡尔直角坐标系的转换关系,可得切向矫正模型为[4]

式中,R为展开圆环离中心的距离,φ为旋转相位.
3.2 径向矫正
PAL内光线经几次折反射后成像,其成像过程是非线性的,如图6所示,由PAL抛物镜面[3]的结构特点可知,空间点A(观察对象)指向原点O(观察点)的射线,映射为与抛物面的交点A′,再把这一点正投影到与Z轴(全景镜头的光轴)垂直的固定平面上,得到全景环形图像点B.
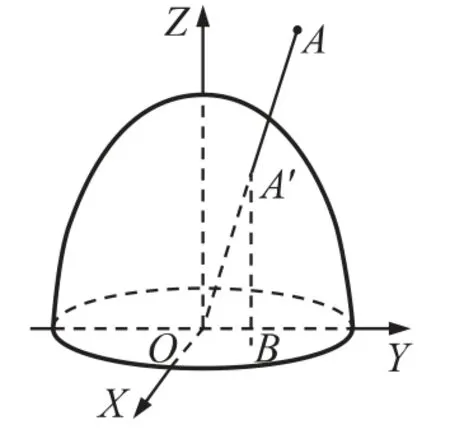
图6 抛物面透视投影模型
若抛物面透视投影模型参数选取恰当,可以校正全景图像中的畸变,将火炮内膛全景环形像映射到三维像空间中的圆柱面.
由于抛物面具有旋转特性,可以把抛物面透视投影模型转化为二维透视投影,如图7所示,所形成的全景环形像半径为r的像圈对应于像空间圆柱面高度为H的圆环.
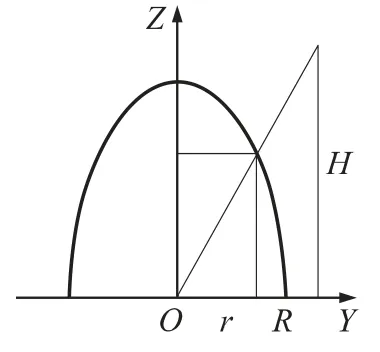
图7 二维透视投影
根据抛物面的形成原理,可以得出二维透视投影模型为

式中,m、n为径向畸变参量.只要确定出最优畸变参量{m,n},即可矫正全景图像失真.遗传算法(GA)是一种模拟自然界生物进化过程的随机化搜索算法[5],利用简单的编码技术和繁殖机制来表现复杂的现象,被广泛应用于图像处理等领域.为此,采用遗传算法,根据平方和最小优化准则,建立目标函数:

式中,Y为展开图像像素点的横坐标,为拟合坐标值.所要求拟合结果评价表达式为

式中,ε为所要求精度,取ε≤0.05%.
4 矩形图像像素插值
环形图像经径向畸变矫正和切向畸变矫正后得到矩形图像,便于分析处理.但径向矫正和切向矫正后的像点往往不落在坐标点上,需要根据它周围原像素的灰度插值得出,使矩形图像中各像点的亮度值等于全景环形图像对应点的亮度值.
4.1 双线性内插法
设环形图像f(i,j),i∈[1,p],j∈[1,q],如图8所示,矩形图像任意点g(x,y)像素值可由环形图像f(i,j)中4邻点(a,b)、(a+1,b)、(a,b+1)、(a+1,b+1)的像素值来确定.

式中,

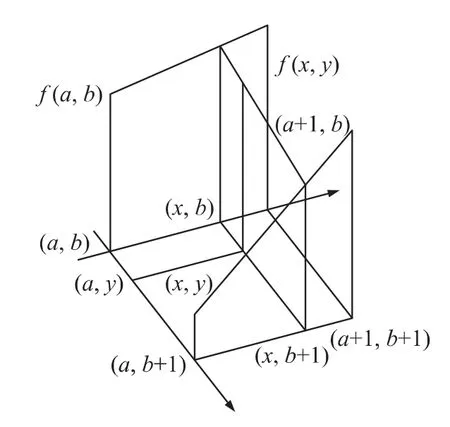
图8 双线性插值
4.2 最优参数的三次卷积法
三次卷积法效果好,但计算量大.为了尽可能地减少数据计算量,根据三次卷积的衰减特点优化三次卷积核函数,其核函数[6]为

式中,参数k为样条函数的衰减速率控制参数.二维图像空间的三次卷积插值可以使用未知值每边的4个点,即水平和垂直方向的全部16个网点,如图9所示.
设二维图像任意像素点坐标为f(x,y),则重建信号g(i,j)的插值公式为

式中,

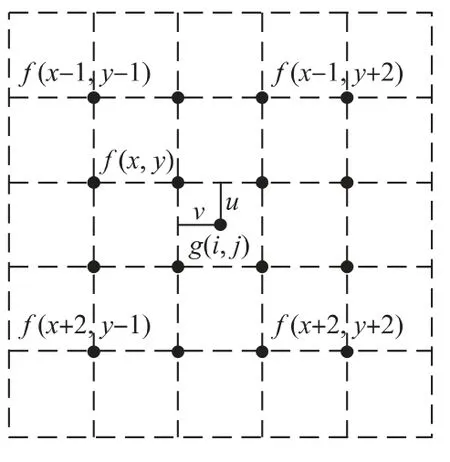
图9 插值节点示意图
4.3 自适应插值法
为了得到高质量的矩形全景图像,并尽可能减少矫正中的数据计算量,根据图像不同部分的特点,采用自适应插值方法,首先使用canny算子得到边缘图像,而后判断待插值像素点是否为孤立边缘点或联通域内的点,若是,则采用最优参数的三次卷积插值,否则,采用双线性插值,这样在提高图像质量的基础上,也保证了处理速度.
5 展开实例
火炮内膛全景图像展开前,需先标定:确定镜头光学中心位置,消除偏心误差;确定全景内膛图像最优畸变参数;确定图像像素的物理尺寸.标定中,把标有模拟膛线和方格图组成的图纸紧贴火炮内壁,图4(a)为全景环形透镜拍摄的标定图.
基于上述校正模型,应用MATLAB编程,通过方格图的圆弧确定出光学中心的位置,通过模拟膛线得到展开图的高度,并设定径向畸变矫正参量{m,n}的范围,得到标定图的展开矩形图像.如图10所示,经计算验证,图中直线斜率与原斜率一致,方格为正方形,校正效果良好.

图10 标定全景图及矫正结果
将得到的模型及其参数用于图4(b)中火炮内膛全景图像的展开,结果如图11所示,可以看出,膛线缠角、阴阳线宽度都得到了很好的矫正.
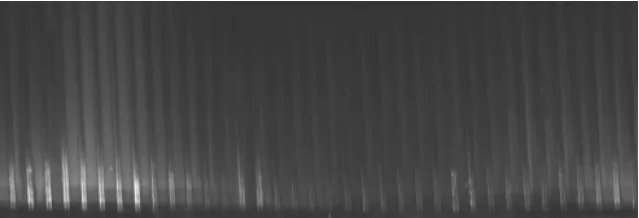
图11 内膛全景图及展开结果
6 结束语
基于全景成像的窥测装置可采集火炮内膛全景图像,实现火炮内膛的快速窥测.本文从径向与切向两方向,将火炮内膛环形全景图像非线性展开成矩形全景图像,并通过插值使矩形图像各点像素值与环形像像素值相等.
采集到的标定图和火炮实际图的展开结果表明,该内膛窥测装置设计合理,展开方法正确,为内膛图像的后继分析与处理奠定了基础,具有很强的实用性.
[1]程惠全,姚炜勇,杨国光,等.全景环形成像的转像系统设计[J].光电工程,2002,29(2):16-19.CHENG Hui-quan,YAO Wei-yong,YANG Guo-guang,et al.Design of an image transferring system used for panoramic annular imaging[J].Opto-Electronic Engineering,2002,29(2):16-19.(in Chinese)
[2]肖潇,杨国光,白剑.基于球面透视投影约束的全景环形透镜畸变矫正[J].光学学报,2008,28(4):675-680.XIAO Xiao,YANG Guo-guang,BAI Jian.Panoramic-annularlens distortion correction based on spherical perspective projection constrain[J].Acta Optica Sinica,2008,28(4):675-680.(in Chinese)
[3]徐玮,高辉,张茂军,等.多视点折反射全景成像系统分析与设计[J].系统仿真学报,2010,22(2):435-438.XU Wei,GAO Hui,ZHANG Mao-jun,et al.Design and realization of multi-viewpoint catadioptric omnidirectional imaging system[J].Journal of System Simulation,2010,22(2):435-438.(in Chinese)
[4]朱方明,杨国光,姚炜勇,等.全景环形透镜环形象的线性化研究[J].光子学报,2001,30(5):590-593.ZHU Fang-ming,YANG Guo-guang,YAO Wei-yong,et al.Linearization of annular image of panoramic annular lens[J].Acta Photonica Sinica,2001,30(5):590-593.(in Chinese)
[5]杨淑莹.模式识别与智能计算—Matlab技术实现[M].北京:电子工业出版社,2008.YANG Shu-ying.Pattern recognition and mental calculation-Matlab technical realization[M].Beijing:Publishing House of Electronics Industry,2008.(in Chinese)
[6]SWAMINATHAN R,GROSSBERG M D,NAYAR S K.Nonsingle viewpoint catadioptric cameras:geometry and analysis[J].International Journal of Computer Vision(S0920-5691),2006,66(3):211-229.
猜你喜欢
西南交通大学学报(2022年5期)2022-11-03
金属热处理(2022年3期)2022-04-09
烟台果树(2021年2期)2021-07-21
西北园艺·果树(2021年1期)2021-02-21
小哥白尼(军事科学)(2020年2期)2020-06-16
东南大学学报(自然科学版)(2020年1期)2020-01-16
摄影之友(影像视觉)(2017年10期)2017-11-07
现代兵器(2017年1期)2017-02-13
兵器装备工程学报(2013年3期)2013-09-12
火炮发射与控制学报(2012年2期)2012-11-22
