
帆板控制系统的设计
2012-12-26 07:55宋艳王进
常州信息职业技术学院学报 2012年1期
宋艳王进
(常州信息职业技术学院电子电气工程学院 江苏常州 213164)
帆板控制系统的设计
宋艳王进
(常州信息职业技术学院电子电气工程学院 江苏常州 213164)
设计了一种基于单片机的帆板控制系统,该系统可以通过对风扇转速的控制来调节风力的大小,实现对帆板转角角度的改变。主要介绍了该系统的硬件系统组成和软件系统的主流程设计。
帆板;角度;单片机
1 系统设计要求
本文是对帆板控制系统的设计,该课题来源于2011年全国大学生电子设计竞赛的题目之一。本文设计的帆板控制系统,是在室内环境下工作的,即不考虑外界条件对系统的影响。该帆板控制系统可以通过对风扇转速的控制,调节风力大小,改变帆板转角θ,该帆板控制系统示意图如图1所示。
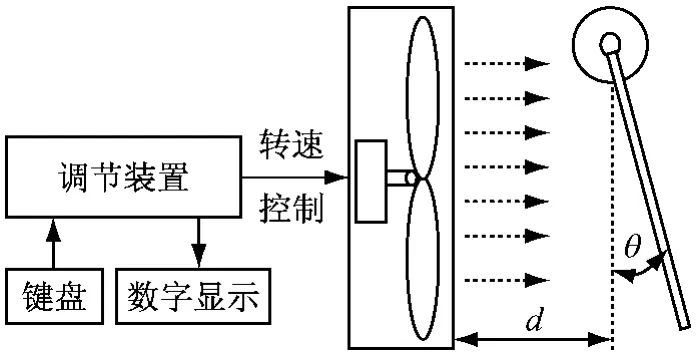
图1 帆板控制系统示意图
系统的主要功能说明:
①用手转动帆板时,能够数字显示帆板的转角θ。显示范围为0°~60°,分辨率为2°,绝对误差≤5°。
②当间距d=10 cm时,通过操作键盘控制风力大小,使帆板转角θ能够在0°~60°范围内变化,并可以实时显示θ。
③当间距d=10 cm时,通过操作键盘控制风力大小,使帆板转角θ稳定在45°±5°范围内,可以实时显示θ,并可以进行声光提示。
④间距d在7~15 cm范围内任意选择,通过键盘设定帆板转角,范围为0°~60°。帆板转角θ可以在5秒内达到设定值,并实时显示θ。
2 系统的总体方案设计
本系统主要包括单片机系统、角度信号采集、液晶显示和键盘输入电路、声光提示和串口通信接口等几个功能模块。系统的总体结构框图如图2。
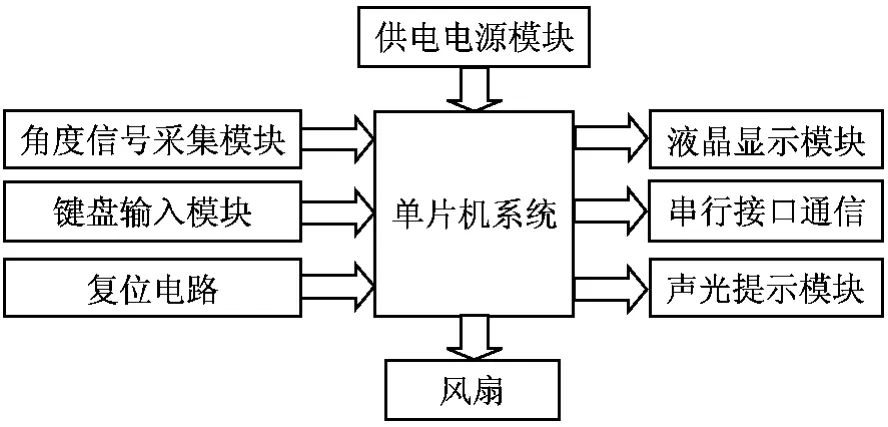
图2 帆板控制系统的总体结构框图
3 系统的硬件设计
3.1 电源模块
系统的各个组成部分都需要供电电源,但各个部分需要的电源大小不一样[1],所以本系统的主要供电电源有12 V和5 V两种。220 V的交流市电经变压、整流滤波后,通过7812稳压得到12 V的电压以此来给风扇供电,12 V的电压经过7805得到5 V电压来给单片机和各个模块的芯片供电。
3.2 单片机系统
对于整个帆板控制系统而言,单片机是整个系统的调节装置。本系统采用STC89C52单片机作为主控元件来控制风扇的转速。单片机系统的主要工作是生成PWM信号来调节风扇的转速去改变帆板的转角大小,并对角度采集模块送过来的信号进行处理后送液晶显示模块LCD1602显示出对应的帆板转角角度值,另外单片机系统还对键盘模块输入的按键信号做出相应的处理。
3.3 角度信号采集模块
该模块主要是对帆板转动的角度值进行采集并进行转换后送单片机处理。角度信号采集模块主要由两部分组成:角度采集电路和A/D转换电路。
角度采集电路主要是采集帆板转动的角度值,角度值的采集实质是电阻分压的原理。本系统采用了高灵敏度、低阻力的WDD35电位器(电阻值5 K,线性失真0.1%),设计时利用帆板的轴承来带动电位器的轴,从而将角度的变换变成电阻值的变化,加上5 V的电压后,将电阻值的变化转化为电压的变化,得到的电压被送到A/D转换电路进行转换。
A/D转换电路主要是将角度采集电路得到的模拟电压信号转换成数字信号送单片机处理。本系统采用的是ADC0832转换芯片,该芯片具有8位分辨率,最高分辨率可达256级,可以适应一般的模拟量转换要求,转换时间仅32 μs。
3.4 液晶显示和键盘输入模块
1)键盘输入模块。本系统键盘采用了4个独立按键,分别为:S2、S3、S4、S5。S2为功能切换键,可以完成风速调节功能和角度预设功能间的相互切换;S3、S4分别为增值和减值键;S5退出键,即退出风速调节和角度预设功能。
2)液晶显示模块。本系统采用的是LCD1602来显示帆板转动的角度值和按键输入的内容。开机后进入人机界面,画面显示角度预设值和当前角度值,根据按下S2键的次数便进入风扇速度调节界面或角度预设调节界面。在调节界面中,可根据按键输入来实时显示当前风扇速度值或预设角度的值。按S3键可显示增大风扇速度值或预设角度的值,按S4键可显示减小风扇速度值或预设角度的值,按下S5退出设置模式回到显示角度预设值和当前角度值界面。
3.5 声光提示模块
当在帆板转动的角度达到预设角度(±5°)时,系统可以发出声光来提示操作人员,声光是通过向预定的端口发送有一定频率的信号来控制蜂鸣器的间歇性的鸣响和发光二极管的亮灭闪烁。
3.6 通信模块
本系统通信模块采用的是标准RS232CD型9针接口来实现PC机与系统的数据传输。STC89C52片上带有全双工串行通信接口,可以使用它来实现与PC机和键盘显示模块之间的通信。系统中采用了MAXIM公司的MAX232芯片实现了PC机输出的RS232C电平和单片机的TTL电平之间的双向转换[2]。
4 系统的软件设计
整个系统的软件设计包括主程序、角度采集转换子程序、风扇驱动子程序、声光提示子程序、液晶显示键盘子程序、通信子程序等。所有的程序均采用C语言编写,可以很方便地调试和下载程序代码。本系统主流程如图3所示。
本系统中PWM信号的产生、帆板角度的控制是软件设计的关键部分。
1)PWM信号的产生。PWM信号主要是用来调节风扇的转速以实现对帆板的角度的改变。本系统是利用单片机的定时器中断来实现定时,在单片机的I/O口产生所需的PWM信号,并可以通过按键调节定时器初值调节PWM信号的占空比,以实现风扇转速的调节。
2)帆板角度的控制。如何控制帆板的角度跟随预设角度值是设计的核心。本系统通过角度信号采集模块实时采集帆板的实际角度值作为反馈信号,构成一个简单的变比例闭环系统。单片机根据采集到的实际角度值和系统预设的角度值之间的误差大小调整反馈的比例系数,误差越大,反馈的比例系数越大,角度误差每10°对应一个比例系数。这样的控制方案算法简单,并且可以缩短系统的响应时间。当角度误差在±5°范围之内时,单片机停止对风扇转速的调节,从而降低帆板角度的超调量,减小帆板控制系统的稳态误差。

图3 帆板控制系统的主流程图
5 系统的调试
5.1 系统的操作方法
1)系统初始化预设角度值为45°,上电后自动达到预设值45°。
2)S2键可以在风速调节功能和角度预设功能间相互切换;系统复位后首次按下S2后可以进入风速调节功能,此时按下S3风扇加速,按下S4风扇减速;再次按下S2后进入角度预设功能,此时按下S3预设角度值增加,按下S4预设角度值减小。
3)在风速调节功能和角度预设功能下,按下S5可以退出风速调节和角度预设功能,系统根据当前的预设角度值,进行角度跟踪。
5.2 系统的测试
系统的测试主要是对角度传感器的性能测试和风扇电压的测试。
1)角度传感器的测试。角度传感器WDD35实际就是360°旋转式电位器,系统对角度要求较高,所以WDD35应该使用电位器中间的那一段阻值。对角度传感器的测试见表1所示。
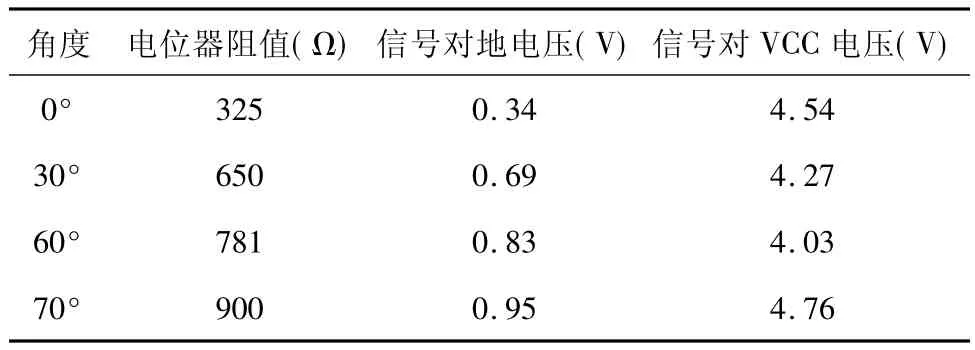
表1 角度传感器的性能参数
2)风扇电压的测试。风扇必须在达到一定的电压值后才能运转,同样当风扇运转时,帆板不一定会产生偏转,必须在风速达到一定速度后才会偏转。具体对应关系见表2。
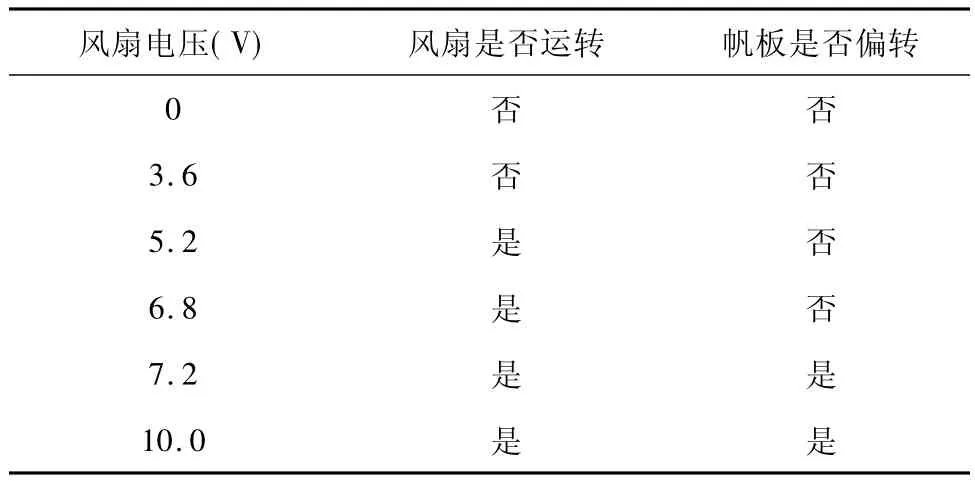
表2 风扇电压值和风扇及帆板的运动状态
本文设计了一种基于单片机的帆板控制系统,主要对该系统的硬件系统、软件系统的实现进行了叙述,并介绍了本系统能实现的功能及操作步骤。该系统还有待改进和完善的地方,可在今后作进一步的深入研究。
[1] 宋艳.基于单片机的智能小电阻测量仪系统的研究[J].装备制造技术,2010(3):23.
[2] 王秋爽,曾昭龙.单片机开发基础与经典设计实例[M].北京:机械工业出版社,2008:296.
Design of the Solar Panel Control System
SONG Yan WANG Jin
(School of Electronic and Electrical Engineering,Changzhou College of Information Technology,Changzhou 213164,China)
The paper discusses the design of a solar panel control system based on MCU,the angle of the solar panel can be controlled by changing fan speed to adjust the speed of wind.The paper mainly expounds the design of hardware structure and main process flow of the system.
solar panel;angle;MCU
TP 273.5
A
1672-2434(2012)01-0019-03
2011-11-16
宋 艳(1978-),女,讲师、工程师,从事研究方向:应用电子、电子信息
猜你喜欢
新教育时代电子杂志(教师版)(2022年31期)2022-02-09
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
模具制造(2019年10期)2020-01-06
解放军健康(2017年5期)2017-08-01
故事大王(2017年4期)2017-05-08
现代工业经济和信息化(2016年4期)2016-05-17
汽车维护与修理(2016年3期)2016-02-28
空间控制技术与应用(2015年4期)2015-06-05
汽车维护与修理(2014年10期)2014-02-28
