
双基合成孔径雷达二维频谱微增量算法研究
2013-03-12 05:23刘玉春王海环
电波科学学报 2013年1期
刘玉春 王 俊 高 博 王海环
(西安电子科技大学雷达信号处理国家重点实验室,陕西 西安710071)
引 言
双基合成孔径雷达(SAR)由于具有成本低、机动灵活、隐蔽性强、能够对大测绘带高分辨成像等特点[1],近年来得到国内外研究人员高度重视,对其成像模式[2-5]、性质分析[5-9]、二维频谱分析[1,10-16]和成像算法[17-21]的研究逐渐深入.
双基二维频谱求解是双基SAR成像研究的一个关键问题,其表达形式和精度对成像算法的设计和应用有至关重要的影响.双基SAR收发双程斜距历程(下面简称为斜距历程)为双平方根项,使二维频谱求解非常复杂.Loffeld双基公式(LBF)算法[10]先对收发斜距历程在各自的驻相点处进行二阶泰勒展开,然后利用驻相原理得到双基SAR点目标的二维近似频谱.但由于LBF算法对收发相位历程进行了平均截断处理,导致其在异构平台构型下存在较大误差.文献[11]对LBF算法进行了改进,利用瞬时多普勒贡献率对相位历程进行了加权处理,提高了所求二维频谱的精确性.文献[1]应用了二维驻相原理,得到了具有较高精度的二维频谱,可以方便地应用在距离多普勒(RD)和线频调变标(CS)成像算法中.级数反演(MSR)算法[12]应用了级数反演原理,精度可以通过级数的阶数控制,聚焦性能优良,已经成为广泛应用的一种二维频谱.文献[13]利用菲涅耳近似得到一种较为精确的二维频谱求解算法,但是只能应用于小斜视角和小双基角的情况下.文献[14]在MSR的基础上对斜距历程级数展开式的系数优化,从而得到了一种更为精确的二维频谱,但是其表达形式较为复杂,使后续成像处理更为复杂.四次精确传递函数(EETF4)二维频谱近似解析算法[15-16]通过直接求解驻相点方程得到驻相点的解析解,进而得到较为精确的二维频谱.
在上述研究的基础上,本文提出双基SAR二维频谱微增量算法.该算法基于斜距历程泰勒级数展开,以斜距历程N-1阶泰勒级数展开时的驻相点(下面称之为N-1阶驻相点)为基础,通过求解N-1阶驻相点至N阶驻相点之间的差值(下面称之为N-1阶微增量)来求取N 阶驻相点的表达式,最终得到二维频谱.算法运算量小,并且具有可扩展性,可以很方便地通过循环使用微增量算法来得到更高阶的驻相点表达式和其对应的二维频谱,而没有诸如ETF算法只能解四次以内方程并且要讨论根的取舍等问题的限制.
1 双基二维频谱的微增量算法
假设发射机信号为chirp信号,则解调后的点目标回波信号可以表达为

式中:wr(τ)为脉冲包络;wa(t)为由双基收发天线决定的方向图函数;kr为脉冲调频率;c为光速;t代表慢时间;τ代表快时间;fc为载频;R(t)为斜距历程.对回波信号进行距离维(快时间)傅里叶变换并应用驻相原理,可得
式(2)中忽略了一个无关紧要的含有π/4相位的常数项.在下面方位傅里叶变换时,也忽略由于使用驻相原理而产生的常数项.WR(fr)=wr(fr/kr),二者仅是尺度变换.下面进行方位维(慢时间)傅里叶变换,有
对θ(t,fr)求导可得

由驻相原理知,θ′(t,fr)=0的解即驻相点,由式(5)可得驻相点方程

如果斜距历程R(t)被N阶泰勒展开,则有
则N阶驻相点方程可写为

同理,N-1阶驻相点方程为

根据文献[12],式(8)可以进一步展开为
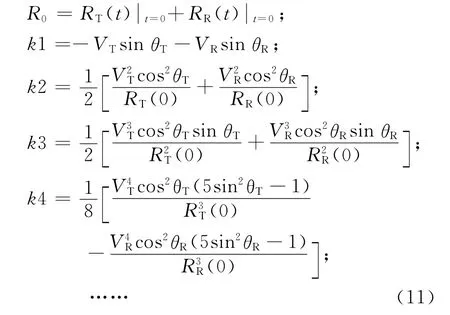
式中:RT(t)、RR(t)分别为发、收的斜距历程;VT、VR分别为发射机和接收机的速度;θT、θR分别为0方位时刻发射机和接收机的斜视角.一般情况下,VT≪RT(0)、VR≪RR(0),观察式(11),可知斜距历程泰勒展开系数kn随着n的增加而指数递减(当θT=θR=0时除外,此时n为奇数时kn为0,n为偶数时kn仍指数递减).从上面的分析可知式(9)中的高次项(NkNtN-1N)对驻相点的影响很小,因此式(9)与式(10)的解相差很小,故而tN-1与tN非常接近,即tN-tN-1≪tN-1.
如果已知tN-1而欲求tN,并且定义
恰当的叙事长度让当代儿童文学精准地定位接受主体的经验、能力,“只有当人在审美状态中把世界置于他自己的身体或观赏世界时,他的人格才与世界分开,对他来说才出现了世界,……精神给无形式的东西以形式,从而表明它自己的自由。”[3]准确的叙事长度让儿童在自己的认知范围内找到精神自由。

称ΔtN-1为N-1阶微增量,则有

结合式(9)、(10)、(12),并根据式(13)忽略 ΔtN-1的高阶项,整理得

由式(14)得

把式(15)带入式(12),得到tN的近似解.参考频谱二维表达式可表示为
式(16)中WA(fa)=wa(tN).
从上面的推导过程可以看出,在微增量算法中为求得tN的近似解,必须满足两个条件:预先求得tN-1;斜距历程被N阶泰勒展开(即要求出kn,n=1,2,……,N).
当斜距历程被三阶泰勒展开时,我们可以直接写出三阶驻相点的解析解

微增量算法具有可扩展性 .只要斜距历程被展开到足够高阶数,就可以把式(18)作为起点,重复使用微增量算法,求出任意阶驻相点的近似解,进而求出其二维频谱.
1)利用式(7)和(8),把斜距N阶泰勒展开.
2)利用式(18)、(15)和(12)求出高阶驻相点表达式.
3)把步骤2中所得到的驻相点作为低阶驻相点,重复步骤2,直至得到tN的表达式.
4)把步骤3中所求tN代入式(16)和(17)即得到双基二维频谱.
2 微增量算法与MSR算法的关系
MSR二维频谱是一种被广泛应用较为精确的双基二维谱,本节通过数学推导来分析微增量算法和MSR算法之间的关系.在斜距历程四阶泰勒展开的情况下,MSR二维频谱为
根据式(15)可以得到三阶微增量Δt3,并把其展开为关于的泰勒级数,有
所以四阶驻相点为

把式(23)带到式(16)和式(17),整理并保留至 (fa+(fr+fc)k1/c)四次项,可得二维频谱为
式(24)、(25)与式(19)、(20)完全一致,表明 MSR算法是微增量算法忽略(fa+(fr+fc)k1/c)高次项后的近似表达.
3 算法仿真与分析
双基SAR的二阶驻相点的解析解为

为了验证微增量算法的正确性,本节分别针对机载和星载两种双基SAR构型进行了仿真实验.在每种构型下,都对四种算法所得到的驻相点和二维频谱及其聚焦性能进行了仿真和对比分析.这四种算法为:基于式(26)二次精确传递函数 (ETF2)算法、基于式(18)三次精确传递函数 (ETF3)算法和基于三阶泰勒展开的MSR算法和微增量算法.在仿真中,对参考点(方位零时刻波束中心照射点)进行了聚焦成像.在仿真中分别对四种算法得到的驻相点和频谱相位进行了误差的分析和比较,并且对成像结果的聚焦参数进行了比较.仿真参数如表1所示.
从前面分析可知,式(18)是三阶驻相点的解析解,因此ETF3算法是仿真的四种方法中最为精确的.从图1可以看出,由于ETF2算法仅仅把斜距历程二阶泰勒展开,所以其驻相点误差要比其他三种算法大二到三个量级.在另外三种算法中,微增量算法和ETF3算法的误差基本相同,而MSR算法所得的驻相点的误差较前面二者要大一些,特别是在星载双基SAR构型中,其最大误差要比前二者高一个量级.
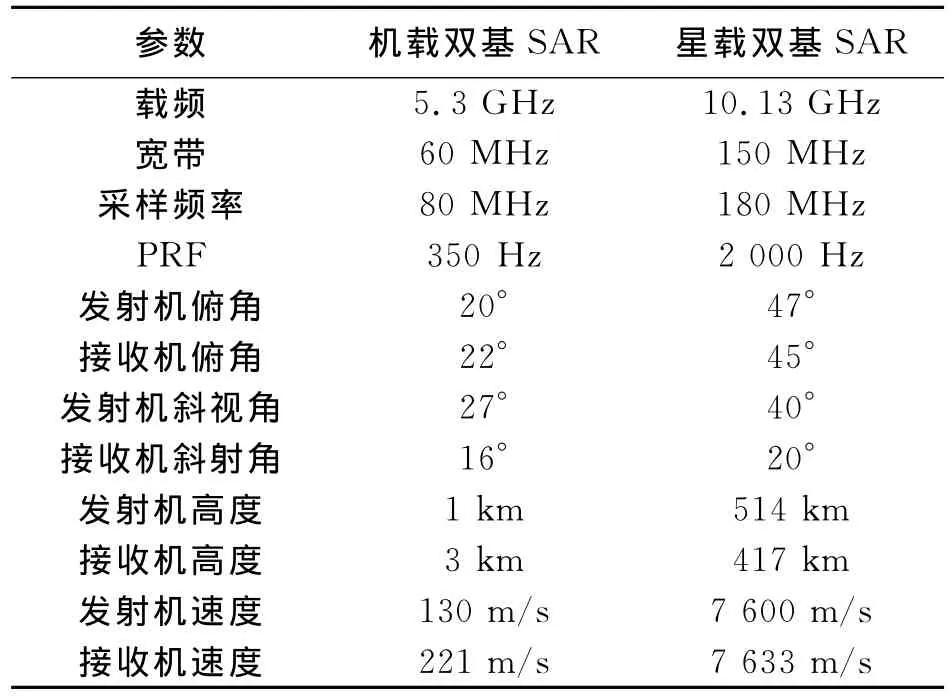
表1 仿真参数
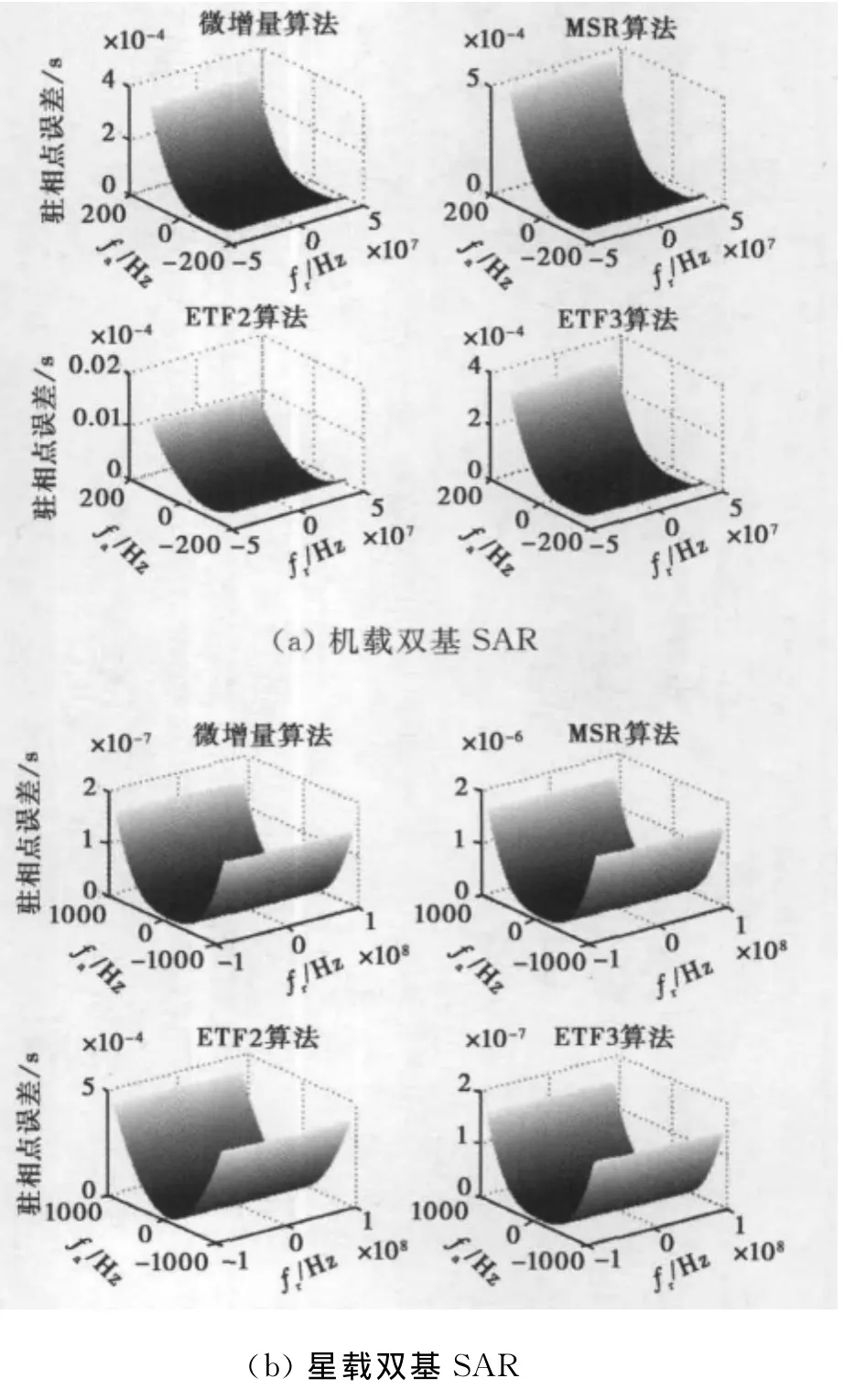
图1 两组实验所求驻相点误差
因为ETF2算法所得到的驻相点误差较大,所以其频谱相位误差也随之增加.从图2可以看出,ETF2算法的二维频谱相位误差比其他三种算法大.微增量算法与ETF3算法的相位误差基本相同,而MSR算法所求得的二维频谱相位误差大于前面二者.另外从图2还可以看出:ETF2算法的相位误差太大,将会严重影响其聚焦效果,而另外三种算法的的相位误差均在可容忍范围内,对聚焦质量影响不大.
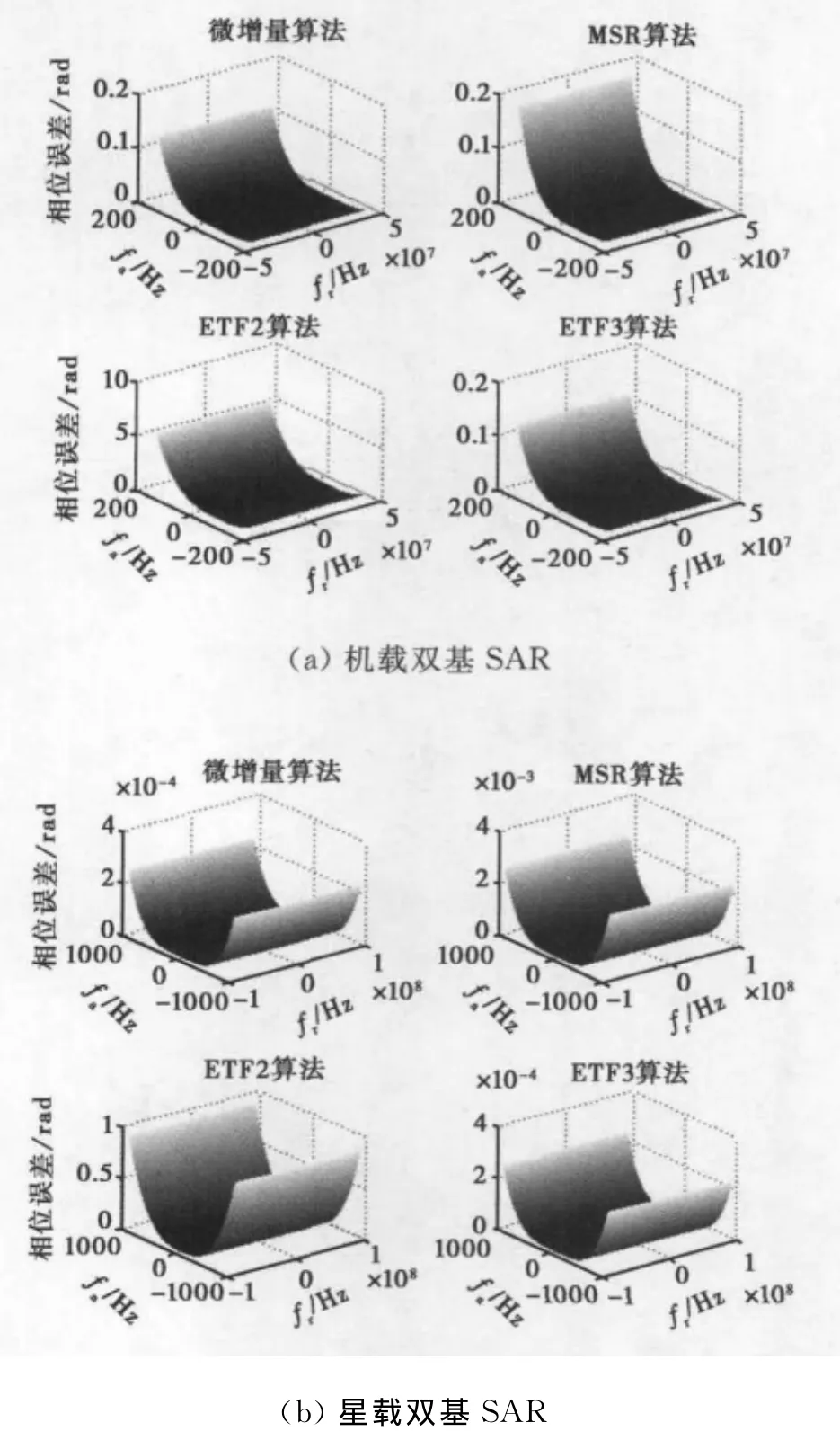
图2 两组实验所求相位误差
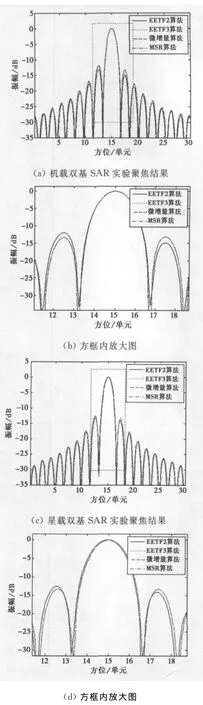
图3 四种算法成像结果方位向剖面图
图3是四种频谱对参考点的成像结果,其中图(b)、(d)分别是图(a)、(c)中虚线方框内部分的放大图.可以看出:由于ETF2算法忽略了斜距历程三次以及高次项,对点目标响应的形状造成了影响(左右不对称),但是对分辨率影响不大.与ETF2算法比,另外三种算法都对点目标进行了较好的聚焦,其剖面图几乎完全重合在一起.
各种算法的聚焦参数如表2所示.因为ETF2算法的点目标响应的左右不对称,所以在表2中分别以PSLR_L、PSLR_R表示点目标响应左侧的峰值旁瓣比和右侧的峰值旁瓣比.从表2可以看出:在四种算法中,ETF2算法聚焦效果稍差,特别是左右两侧的PSLR失衡严重.另外三种算法的聚焦性能非常接近,其聚焦参数的差异仅为10-4量级.与MSR算法相比,微增量算法和ETF3算法的聚焦效果更为接近,几乎完全一致.
在仿真实验中,利用微增量算法由二阶驻相点得到了三阶驻相点的近似解,免去了求解方程的过程,进而得到了更加精确的二维频谱.在斜距历程均被展开为三阶泰勒级数的情况下,微增量二维频谱算法的聚焦性能与ETF算法和MSR算法很接近.仿真实验表明:通过微增量算法,可以避免解驻相点方程而得到更加精确的驻相点表达式和双基二维频谱,提高了二维谱的精确性.
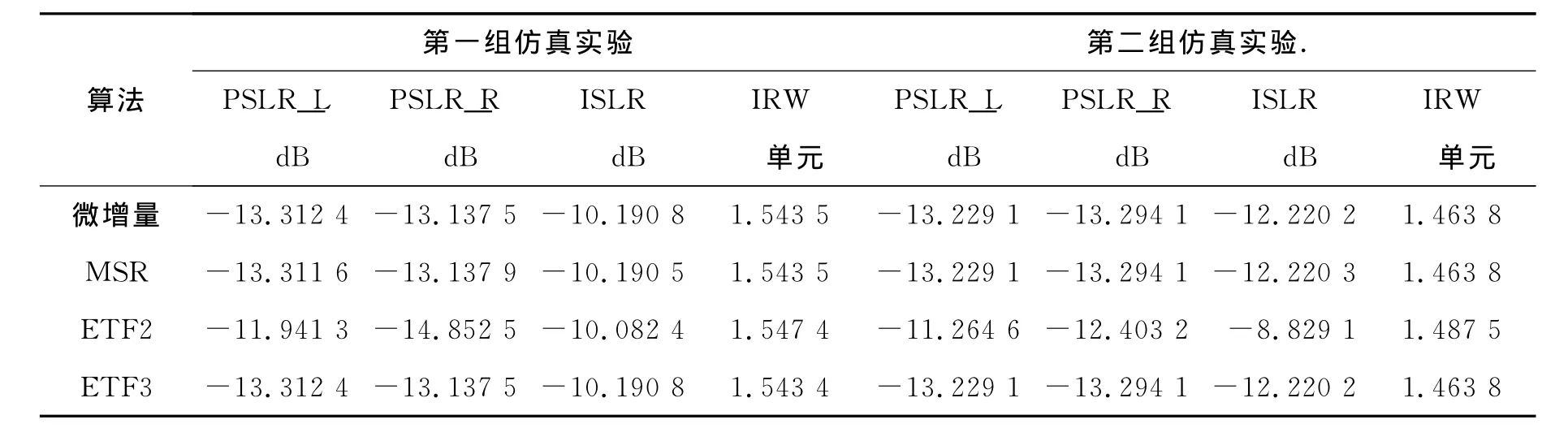
表2 四种算法聚焦参数对比
4 结 论
文章提出一种求解双基二维频谱的微增量算法.该算法通过求解低阶驻相点和高阶驻相点之间的微增量得到高阶驻相点的近似解,进而得到双基二维频谱.算法原理简单,运算量小,编程实现容易.通过数学推导发现,MSR算法是微增量算法的一种近似表达形式.仿真实验表明微增量算法所求得二维频谱的聚焦性能与ETF3算法、MSR算法非常接近,验证了其有效性.该算法具有可扩展性,利用微增量算法可以获得任意阶数的驻相点和其二维频谱.但是随着级数的升高,其驻相点和二维谱的表达式会变得非常复杂,因此很难得到.如何对驻相点表达式进行处理,使之简洁明了,有利于二维频谱的处理,将是我们下一步的研究内容.
[1]WANG R,DENG Y,LOFFELD O,et al.Processing the azimuth-variant bistatic sar data by using monostatic imaging algorithms based on two-dimensional principle of stationary phase[J].IEEE Trans Geosci Remote Sens,2011,49(10):3504-3520.
[2]ZHEN Jie,ZHANG Zhenhua,WU Shunjun,et al.GNSS illuminator based high range resolution algorithm in space-surface bistatic SAR[C]//IGARSS.Honolulu,25-30July,2010:4608-4611.
[3]WANG Wenqin.GPS-based time &phase synchronization processing for distributed SAR[J].IEEE Trans Aerosp Electron Syst,2009,45(3):1040-1051.
[4]徐 伟,邓云凯.基于二维Chirp-Z变换的星载TOPSAR成像算法[J].电子与信息学报,2011,33(11):2679-2685.XU Wei,DENG Yunkai.Imaging algorithm of spaceborne TOPSAR data based on two-dimension chirp-Z transform[J].Journal of Electronics & Information Technology,2011,33(11):2679-2685.(in Chinese)
[5]LI Wenchao,HUANG Yulin,YANG Jianyu,et al.An improved radon-transform-based scheme of doppler centroid estimation for bistatic forward-looking SAR[J].IEEE Geosci Remote Sens Lett,2011,8(2):379-383.
[6]朱振波,汤子跃,张亚标,等.基于Radon变换的双站SAR多普勒参数估计[J].电子与信息学报,2008,30(8):1331-1334.ZHU Zhenbo,TANG Ziyue,ZHANG Yabiao,et al.The estimation of Doppler parameter of bistatic SAR based on radon translation[J].Journal of Electronics&Information Technology,2008,30(8):1331-1334.(in Chinese)
[7]黄钰林,杨建宇,武俊杰,等.机载双站SAR分辨率特性分析[J].电波科学学报,2008,23(2):174-178.HUANG Yulin,YANG Jianyu,WU Junjie,et al.Resolution characteristic analysis for bistatic airborne SAR[J].Chinese Journal of Radio Science,2008,23(2):174-178.(in Chinese)
[8]武拥军,黄 冶,吴先良.机载双站聚束合成孔径雷达的三维空间分辨特性[J].电波科学学报,2011,26(6):1200-1206.WU Yongjun,HUANG Ye,WU Xianliang.Three-dimensional spatial resolution of airborne bistatic spotlight SAR[J].Chinese Journal of Radio Science,2011,26(6):1200-1206.(in Chinese)
[9]LIU Zhe,YANG Jianyu,ZHANG Xiaoling,et al.Study on spaceborne/airborne hybrid bistatic SAR image formation in frequency domain[J].IEEE Geosci Remote Sens Lett,2008,5(4):578-582.
[10]LOFFELD O,NIES H,PETERS V,et al.Models and useful relations for bistatic SAR processing[J].IEEE Geosci Remote Sens Lett,2004,42(10):2031-2038.
[11]YANG Kefeng,HE Feng,LIANG Diannong,et al.A two-dimensional spectrum for general bistatic SAR processing[J].IEEE Geosci Remote Sens Lett,2010,7(7):108-112.
[12]NEO Y,WONG F,CUMMING I.A two-dimensional spectrum for bistatic SAR processing using series reversion[J].IEEE Geosci Remote Sens Lett,2007,4(1):93-96.
[13]GENG Xupu,YAN Honghui,WANG Yanfei.A two-dimensional spectrum model for general bistatic SAR[J].IEEE Trans Geosci Remote Sens,2008,46(8):2216-2223.
[14]WANG Fang,LI Xiang.A New method of deriving spectrum for bistatic SAR processing [J].IEEE Geosci Remote Sens Lett,2010,7(3):483-486.
[15]ZHONG Hua,LIU Xingzhao.A fourth-order imaging algorithm for spaceborne bistatic SAR[C]Proc IGARSS.Denver,2006:1196-1199.
[16]ELDHUSET K.Spaceborne bistatic SAR processing using the EETF4algorithm[J].IEEE Geosci Remote Sens Lett,2009,6(2):194-198.
[17]WANG R,LOFFELD O,NIES H,et al.Chirp scaling algorithm for the bistatic SAR data in the constant-offset configuration[J].IEEE Trans Geosci Remote Sens,2009,47(3):952-963.
[18]QIU Xiaolan,HU Donghui,DING Chibiao.An improved nlcs algorithm with capability analysis for onestationary BiSAR[J].IEEE Trans Geosci Remote Sens,2008,46(10):3719-3186.
[19]陈晓龙,丁赤飚,梁兴东,等.改进的接收机固定双站NLCS成像算法[J].电子与信息学报,2008,30(5):1041-1046.CHEN Xiaolong,DING Chibiao,LIANG Xing dong,et al.An improved NLCS imaging algori-thm of bistatic SAR with a stationary receiver[J].Journal of Electronics & Information Technology,2008,30(5):1041-1046.(in Chinese)
[20]BAI Xia,SUN Jinping,MAO Shiyi.A novel approach for bistatic SAR imaging using a stationary receiver[C]//ICSP2008Proceedings.Beijing,October 23-29,2008:2250-2253.
[21]蔡复青,何 友,宋 杰.大斜视双基地SAR的二维可分离成像算法[J].数据采集与处理,2010,25(5):554-559.CAI Fuqing,HE You,SONG Jie.Two-dimentional separated approach for high squint bistatic SAR imaging[J].Journal of Date Acquisition & Processing,2010,25(5):554-559.(in Chinese)
猜你喜欢
数学物理学报(2022年2期)2022-04-26
数学物理学报(2022年1期)2022-03-16
电力勘测设计(2022年2期)2022-03-08
中国惯性技术学报(2019年5期)2020-01-07
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
北京航空航天大学学报(2017年4期)2017-11-23
中学生数理化·七年级数学人教版(2017年2期)2017-03-25
测绘通报(2017年2期)2017-03-07
西安工程大学学报(2016年2期)2016-06-05
湖南城市学院学报(自然科学版)(2015年3期)2015-08-24
