
一种基于双闭环控制的并联Buck均流器设计
2013-06-27 05:45许滔,吕青,高嵬
船电技术 2013年5期
许 滔,吕 青,高 嵬
(1. 海装上海局航空器材处,上海 200083;2. 空军预警学院电子技术研究所,武汉 430012;3. 海军工程大学电气工程学院,武汉 430033)
一种基于双闭环控制的并联Buck均流器设计
许 滔1,吕 青2,高 嵬3
(1. 海装上海局航空器材处,上海 200083;2. 空军预警学院电子技术研究所,武汉 430012;3. 海军工程大学电气工程学院,武汉 430033)
直驱式永磁同步风电系统电机侧变换器的一种常见拓扑结构为二极管整流桥后接Boost斩波电路。此结构具有较强的非线性,采用普通PI控制器很难使系统在正常运行范围内保持较好动态性能。本文基于双闭环控制方法,设计了基于Buck电路的并联均流器,并进行了相关仿真和试验。
Buck电路 传递函数 频域分析
0 引言
多通道并联具有功率密度高,输出功率大,冗余性好,可模块化设计等诸多优点,但由于每个并联模块的外特性不一致,所分担的负载电流不均衡,承受电流多的模块的可靠性大为降低,严重时还会引起系统崩溃。因此,并联均流技术是实现高性能模块化大功率电源系统的关键。常用的并联均流方法中,电压环误差信号调整法(包括主从均流、平均电流均流、自主均流等)最受关注[1,2]。该方法采用双闭环控制,通过比较各模块的输出电流,把所产生的电流误差信号注入电压环,调整电压误差信号达到均流控制,从而获得较为理想的均流效果。本文设计了基于Buck电路的并联均流器,并进行了相关仿真和试验,达到了较好的均流效果。
1 并联Buck电路系统的设计
1.1 输出滤波器
输出滤波器由输出电感和输出电容组成,输出电感的直流等效电阻(DCR)与输出电容的等效串联电阻(ESR)对于环路的稳定性起重要作用,尤其以后者作用明显。
该电路的增益GLC=dmax,即电路的最大占空比;其传递函数为

可见该输出滤波器有一个双极点
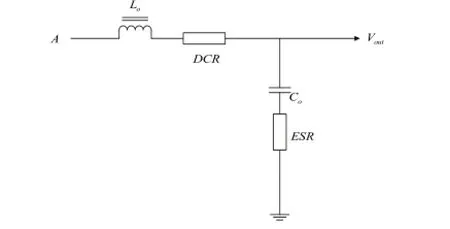
图1 输出滤波器电路
该系统的Bode图如下:
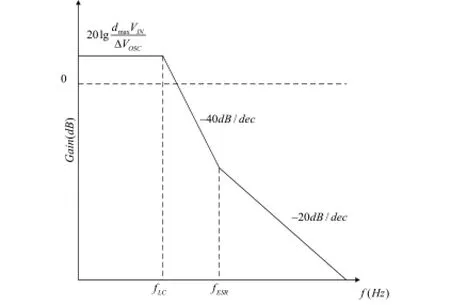
图2 开关管电路与输出滤波器的系统Bode图
系统在低频段时,XC=XL,输入信号不衰减;在频率fLC以上,随着电容阻抗XC的降低,电感阻抗XL的增加,使得增益变化率为-40 dB/dec(或斜率为-2),由于多数滤波电容均具有ESR,因此在fLC以上的低频段,XC>>ESR,此时阻抗中仍然是容抗XC在起作用,其增益变化率仍为-40 dB/dec;在更高的频段,当XC=ESR时,从输出端看系统阻抗为ESR,此时的输出滤波变为LR滤波,而不是LC滤波,此时感抗XL以20 dB/dec变化,增益变化率变为-20dB/dec。
1.2 单路Buck变换器的传递函数
基于主干网设计视角下的高速公路联网收费数据通信研究……………………………………………………… 范敬光(1-275)
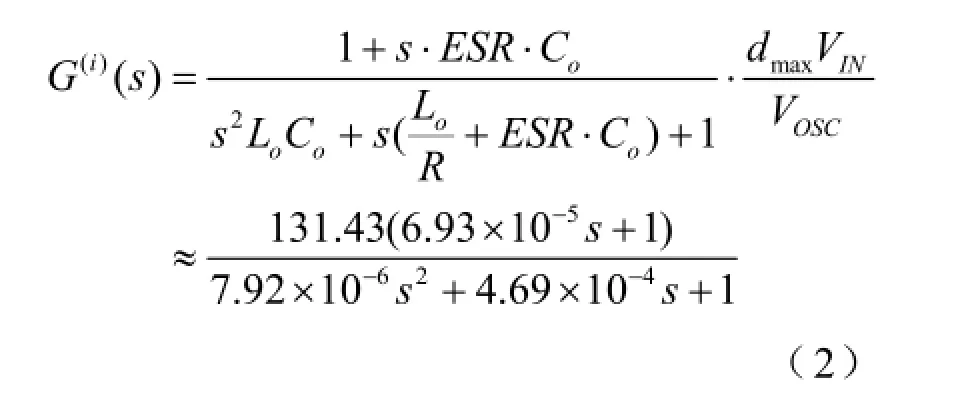
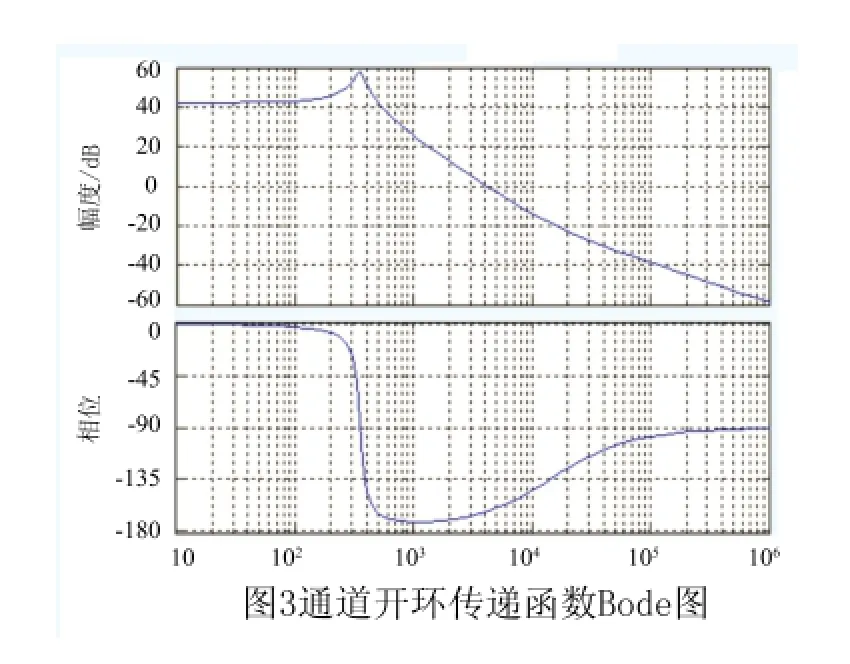
单个Buck电路通道输入直流电压175~320 V,取正常工作电压230 V,输出直流电压50~125 V,最大输出电流60 A,主电路输出电感取400 μH,主电路输出电容6只并联,单只3300 μF/450 V,每只电容的ESR为27 m Ω,总的ESR为3.5 mΩ,开关频率取18 kHz,负载电阻为1 Ω(其中包含换向绕组5.5 mΩ),调制器峰峰值为1.25 V,取该Buck电路的穿越频率为fc=0.2 fs=3.6 kHz。综合前面的分析,各通道的开环传递函数为
1.3 电压反馈外环的设计
进行自主均流控制时,要设计合理的电压反馈外环,以确保单个变换器能正常运行。一个特性良好的变换器电压反馈外环的频率特性应遵循以下原则:
1)低频段增益高,斜率大,以提高系统的稳态性能;
2)中频段的斜率以-20 dB/10倍频为宜,幅频特性曲线的穿越频率fc要足够大,这样系统动态响应快。根据奈氏判据,fc必须小于开关频率fs,一般取fc=(1/4-1/6) fs。中频段还要足够宽,其宽度不能小于10,以保证足够的相角裕度,一般要求相角裕度γ≥45°;
3)高频段的设计主要考虑提高系统的抗干扰能力,幅频特性曲线要随频率的增大而迅速减小[3,4];
4)交越频率(此时环路总增益为1即0dB)的相移应小于180°,同时相位裕度(相位角与-180°之差)应取45°;
5)应避免幅频特性曲线以-40 dB/dec的增益变化率随频率变化,整个系统的开环幅频特性曲线应以-20 dB/dec交越。其中式(4)、(5)是系统的稳定性判据。由式(1)和(2)可知,由于Buck变换器具有二阶LC输出滤波特性,参数一般较大,自然频率:
比较低,系统有较大的180°相角延迟,在中频段是以-40 dB/10倍频的斜率穿越0 dB线,因此其最佳的电压反馈调节器是一个带有2个零点和3个极点的PID控制器,该控制器电路图可参考图4,其传递函数为
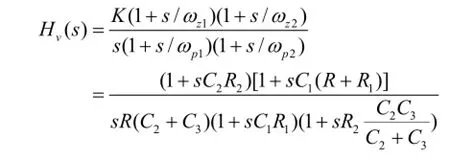
ωz1、ωz2分别为两个零点的角频率,ωp1、ωp2分别为两个极点的角频率。
取fc=fs/5,PID的零极点选取规则如下:第一个极点选在电容等效串联电阻(ESR)的谐振频率附近,即fp1≈fESR=1/2πRCC;第二个极点选在fc与fs之间,一般取第二个极点频率fP2=(2-5) fc;第三个极点位于原点,包含一个纯积分环节;第一个零点频率小于自然频率,一般取fZ1=(1/3-1/2) f0;第二个零点频率选在等于或略大于自然频率附近,即fZ2≈f0。
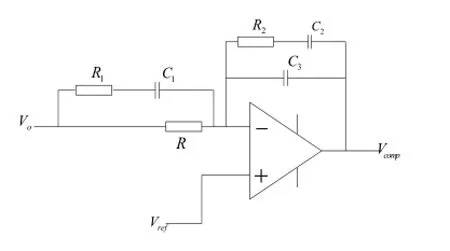
图4 具有2个零点和3个极点的PID调节器
因此,反馈外环的参数选取如下:
a)R应取1-5 kΩ,并在期望的带宽下求取R2

c)为了满足交越频率以-20 dB/dec的变化率穿越0 dB线,需取
d)fp2=(2~5)fc,或者取fp2=(1/2~1)fs,因为fs在确定之后一般不会再改动。在此取经验值fp2=0.7fs,也是由于设置较低的fp2能够有效地降低外环的增益,从而降低接收高频尖峰噪声的干扰。相应的参数选取有:
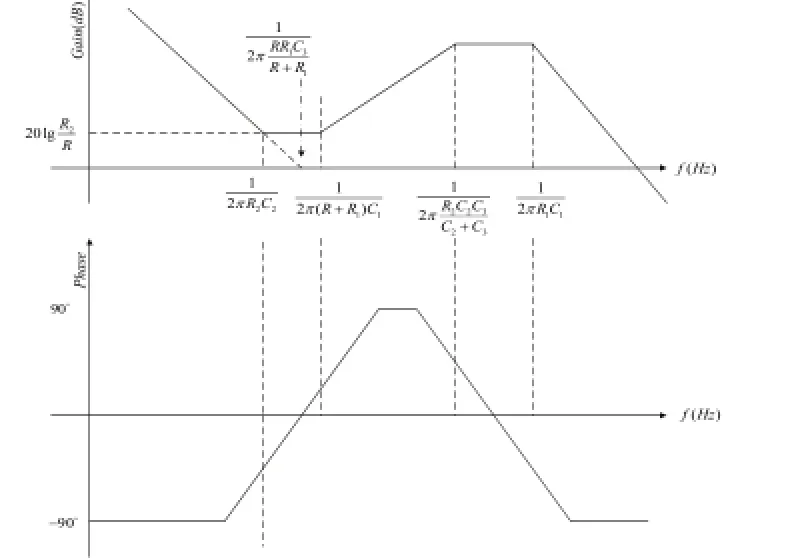
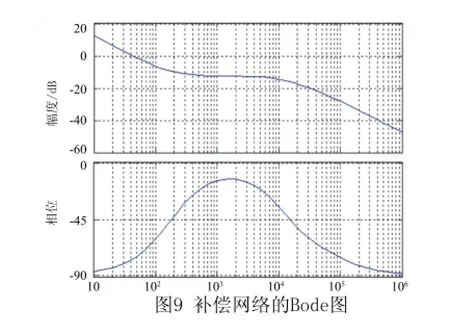
图5 补偿网络的幅相特性
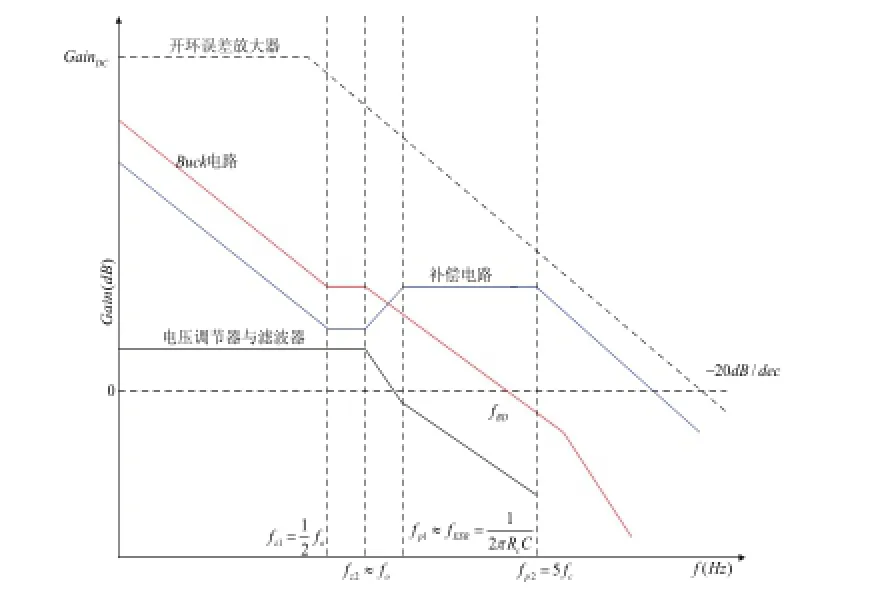
图6 系统Bode图
1.4 均流补偿器设计
如图7所示,采用自主均流控制时,反馈回路包含3个部分:电流采样模块,电压调节器和均流补偿器。电流采样模块的传递函数HS(S)=RG,其中R是电流采样电阻,G是电流放大器的增益;均流补偿器用于比较变换器输出电流和均流母线信号的差异,输出的误差电压信号用于调整基准电压,其设计对均流环的动态性能有很大影响,设计时必须考虑到均流环的稳定性,以及减小并联变换器之间的相互影响。
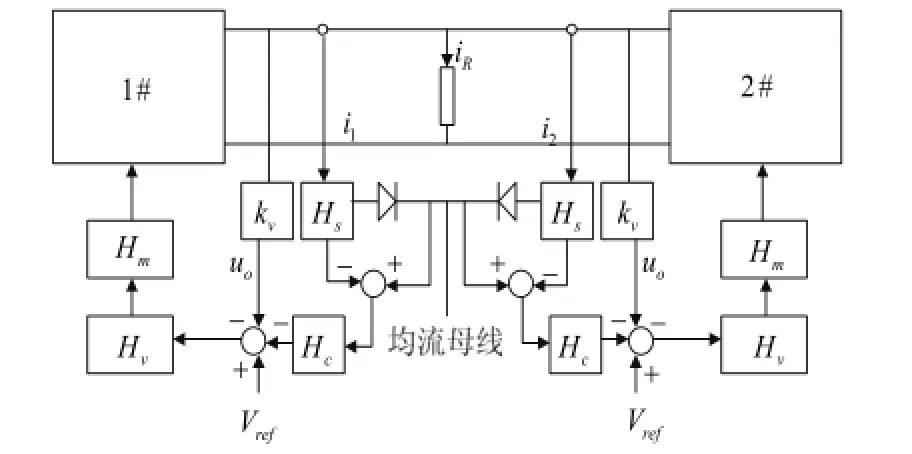
图7 自主均流技术原理图
根据图7,由3个Buck变换器组成的并联冗余系统的小信号模型如图8所示。其中上标(i)表示传递函数属于变换器i。PWM控制模块可近似认为是一个增益恒定的环节,其传递函数为
其中Vm为锯齿波电压幅值。不失一般性,假设变换器1为主模块,变换器2和变换器3为从模块。变换器2和3的均流动态性能由均流回路增益TCS决定,即

由于上式中HS、Hv、Fm和F4均已确定,则可以根据其幅频特性曲线设计均流补偿环节的传递函数Hc。均流补偿环节应限制主模块到从模块的带宽,尽可能增大低频增益和相角裕度,尽量减少开关频率附近的纹波。故可采用惯性环节。
其中ωp的取值应尽量减少开关频率附近的电流纹波并保持良好的动态响应,而穿越频率的大小由增益Kc决定。
2 仿真与实验验证
本章样机未加反馈网络前的系统Bode图如图10所示,从中可以看出在穿越频率3 kHz处,相角裕度约为22.5°。
而由上节可知,各补偿网络可作如下设计:
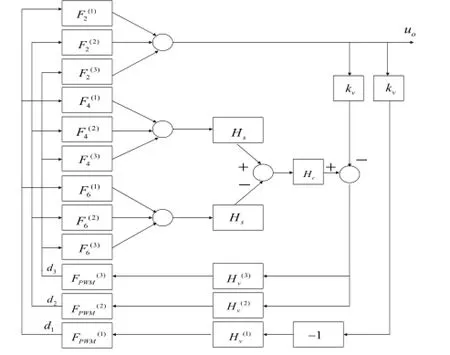
图8 3个Buck变换器并联系统的小信号模型

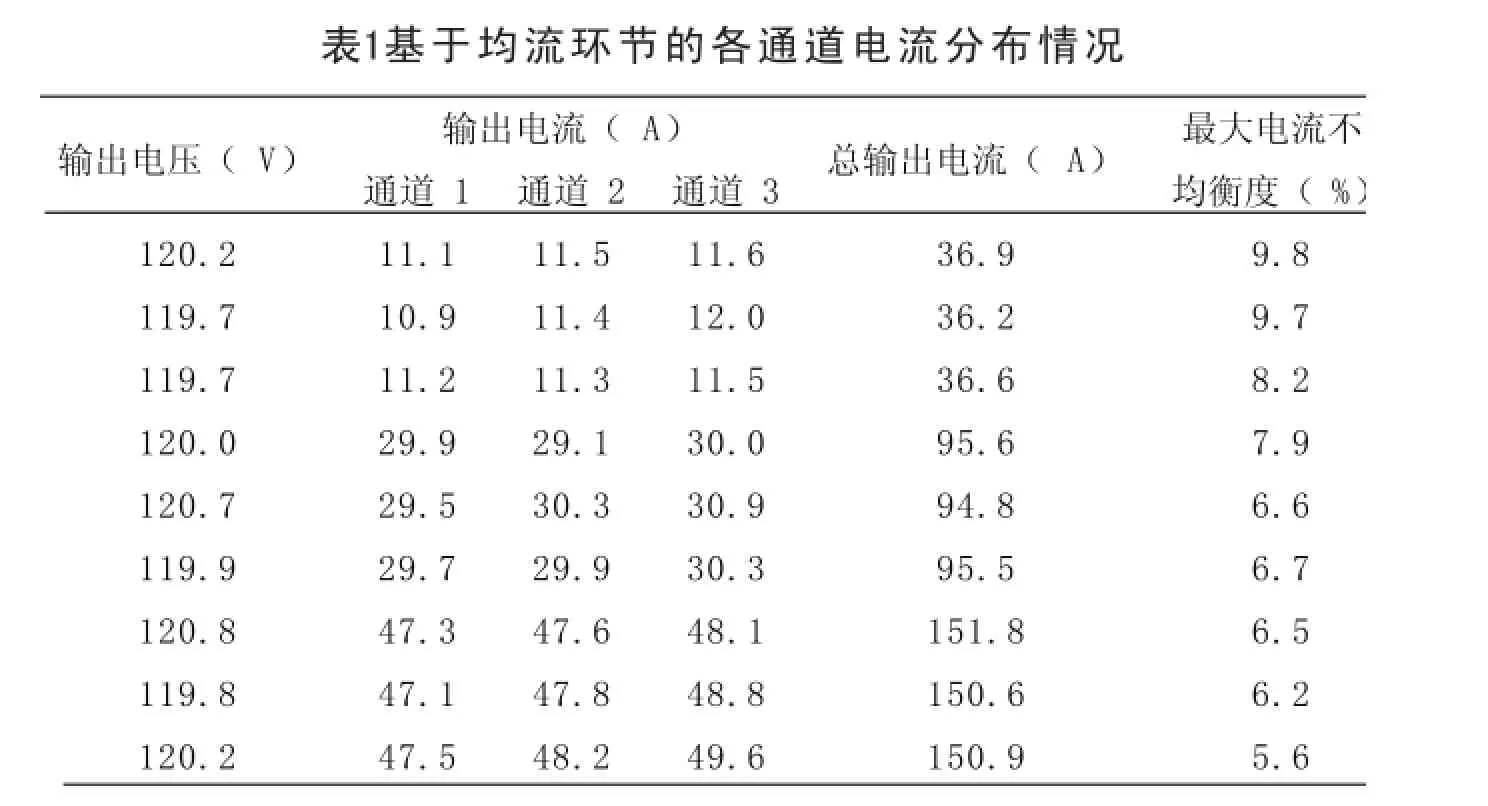
装置主电路采用Buck电路,电路参数为输入电压175~320 V,输出电压50~120 V,开关频率18 kHz,输出电感400 μH,输出电容为6只并联的3300 μF/450 V电解电容。为了验证这种均流方法的可靠性,并人为地把它们的输出特性调节得有差别。如果不加均流环节,由于输出电阻(主要是模块的输出端到并联的公共点之间)很小,而且输出特性也不可能完全相同,各个模块的输出电流差别非常大,在轻载时不能稳定输出,在比较大的负载时,通常是设定输出电压高的模块输出大部分电流,设定输出低的模块基本不输出电流。采用了本文介绍的均流控制方法后,从表1的结果可见并联模块之间的输出电流差别不大。
3 结论
本文利用频域分析法设计了双闭环控制的Buck均流器,设计了电压反馈外环和均流环节的相关参数,并通过试验表明该均流器的电流不均衡度可控制在10%以内,达到了装置设计要求,同时为利用DSP进行均流设计奠定了硬件基础。
[1] 符赞宣,瞿文龙,张旭.平均电流模式DC/DC变换器均流控制方法[J].清华大学学报(自然科学版),2003,43(3):337-340.
[2] 蔡宣三,龚绍文.高频功率电子学—直流-直流变换部分[M].北京:科学出版社,1993.
[3] 胡书举, 李山,张立.IGBT 极限电流与通态极限功耗的研究[J].中国电机工程学报,1999, 19(6):47-51.
Design of a Parallel-current-sharing Buck with Double Closed Loop
Xu Tao1, Luv Qing2,Gao Wei3
(1. The aircraft equipment office of Shanghai Bureau of NAD, Shanghai, 200083; 2. The electronic technology institute in Air Force early warning college, Wuhan, 430012; 3. The electricity engineering school in NUE, Wuhan 430033)
Based on double closed loop controlling method, in this paper a Buck current-sharing device is designed with the help of frequency domain analysis to analyze the transfer function, and the voltage feedback outer loop parameters and current sharing loop parameters are obtained. The correctness of these designed parameters is testified by the correspondent simulation and experiment, and the current sharing experiment results are satisfying.
Buck circuit; transfer function; frequency domain analysis
TM315
A
1003-4862(2013)05-0039-05
2012-10-22
许 滔(1980-),男,工程师。研究方向:导航工程。
猜你喜欢
科教导刊·电子版(2022年5期)2022-03-19
中学生数理化·中考版(2021年10期)2021-11-22
北京航空航天大学学报(2021年6期)2021-07-20
电子制作(2019年19期)2019-11-23
测控技术(2018年7期)2018-12-09
电子制作(2018年19期)2018-11-14
光学精密工程(2016年4期)2016-11-07
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
