一种基于单神经元PID控制策略的汽车主动悬架系统研究
2013-08-16 07:26方振龙
机械设计与制造工程 2013年7期
方振龙
(长春职业技术学院工程分院,吉林长春 130000)
悬架是汽车的重要组成部分,它对汽车的动态特性有着十分重要的影响。与被动悬架相比,主动悬架能提高汽车行驶过程中的平顺性与操纵稳定性,有利于进一步提高汽车的性能。近年来国内外研究人员对汽车主动悬架进行了大量的研究工作,以寻求一种能够为汽车提供良好性能的控制规律。现有的主动悬架控制方法往往过于复杂,或者是附加条件过多,在应用上有一定的局限性。针对这一问题,本文本着简单、有效的原则,把单神经元控制策略应用于主动悬架控制系统,提出一种单神经元PID 控制策略[1]。
1 汽车悬架系统概述
1.1 被动悬架
被动悬架的结构如图1所示,它是一个基本的弹簧阻尼系统,是针对特定的路面状况和汽车运行工况设计的,是一种时不变系统。因为被动悬架系统的参数在车辆行驶过程中无法自动调节,不能适应环境的不断变化,因此被动悬架在工程应用中有一定的局限性。
1.2 主动悬架
为了克服被动悬架的缺点,Fedrspiel Labrosse教授提出了主动悬架的设计方案,即在机构中增加了一个作动器,依靠外界供给的能量,由作动器主动产生作用力,主动抑制车体的运动,使悬架始终处于最优减振状态。其结构如图2所示。
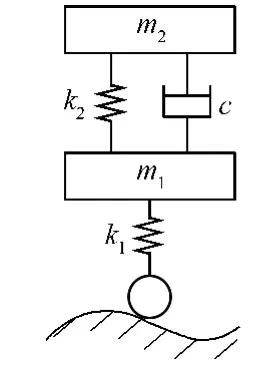
图1 被动悬架
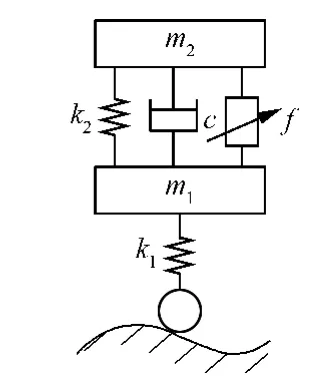
图2 主动悬架
当路面输入发生变化时,微处理器接收到加速度、位移等测量信息后,会产生控制信号,主动悬架的作动器就会根据控制信号产生相应大小的作用力。因此,主动悬架可根据外界输入或车体本身状态的变化进行自适应调节,从而使汽车具有很好的平顺性及可操纵性。
2 主动悬架的数学模型
以1/4主动悬架模型为研究对象,其微分方程组为:

式中:m1为车轮质量;m2为车身质量;k1为轮胎刚度;k2为悬架刚度;c为悬架阻尼系数;f为作动器的主动控制力;x1为车轮位移;x2为车身位移;s为路面垂向输入位移。
假设状态变量

输入变量
U=[f,s']T
输出变量

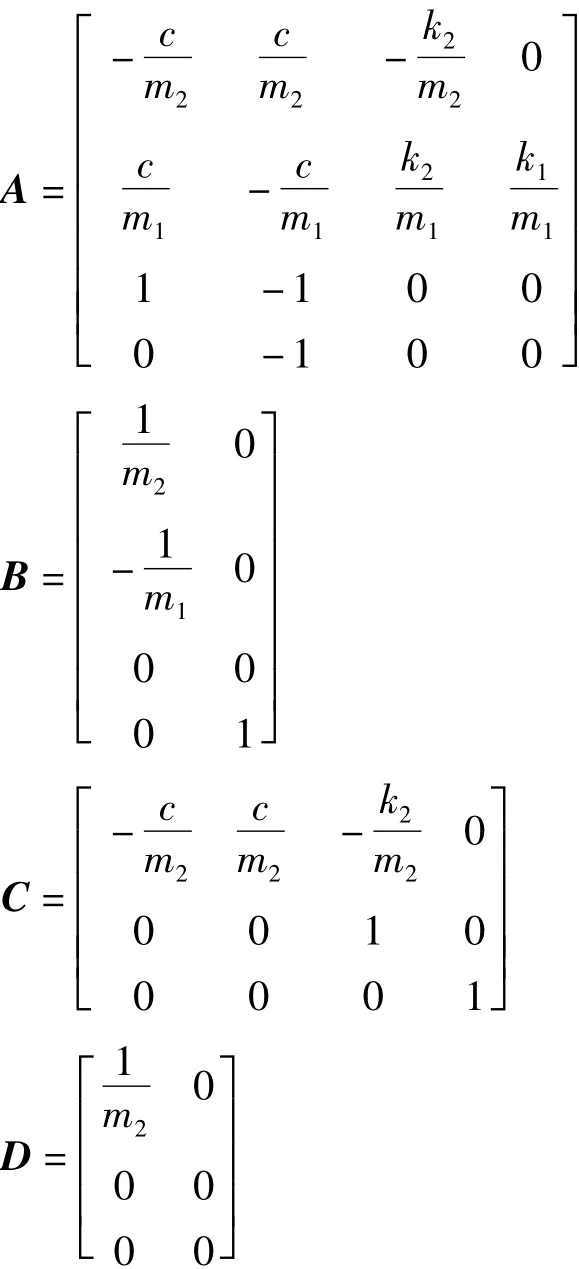
则主动悬架模型的状态空间表达式为:

式中:
3 控制策略研究
针对主动悬架这个复杂、具有不确定性参数及多变环境的被控对象,如何设计出有效的控制策略是一个非常关键的问题[2]。
3.1 PID 控制
PID控制,即比例-积分-微分控制,是一种最常见、应用最广泛的控制策略,其控制规律为:

式中:KP为比例系数;TI为积分时间常数;TD为微分时间常数;u(t)为控制器输出控制信号;e(t)为控制器输入偏差信号。
PID结构框图如图3所示。
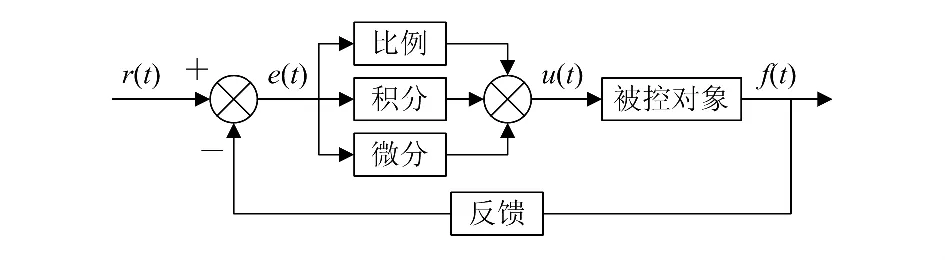
图3 PID控制系统结构框图
PID控制器只能应用于模型一定、参数一定的系统,不具备自适应功能,当外部环境发生变化时不能实时调整,难以保证控制精度。因此,传统的PID控制只适合于工况简单,干扰因素少,对控制要求不高的场合[3]。
3.2 单神经元PID控制
人工神经网络控制是智能控制的一个很重要的分支,是人们受生物神经元的启发,通过模拟人脑功能而提出的一种控制方法,可以从理论上近似任意一个复杂的非线性系统[4]。人工神经元模型如图4所示。
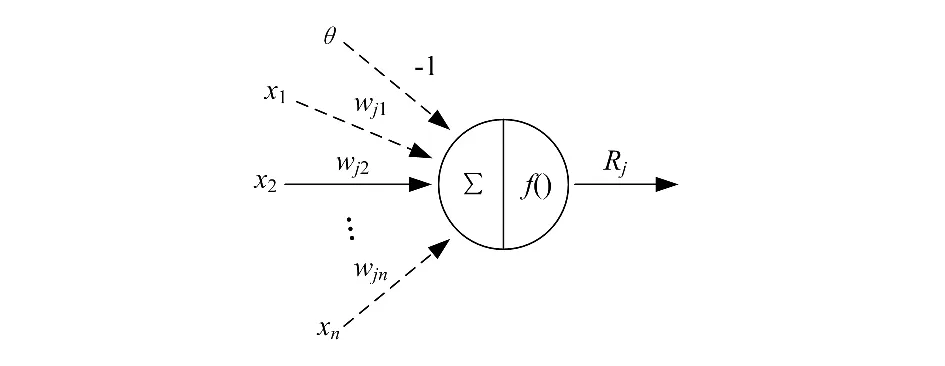
图4 人工神经元模型
把人工神经网络与传统PID相结合,提出一种单神经元PID控制方法,应用于汽车主动悬架控制系统中,图5为单神经元PID控制系统方框图。
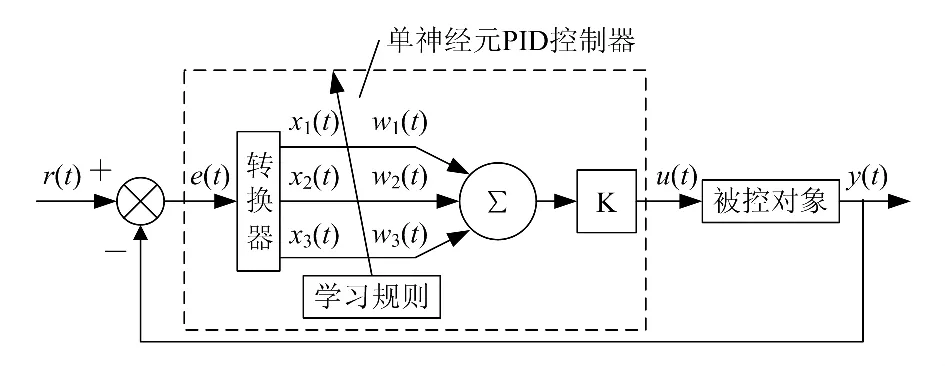
图5 单神经元PID控制系统方框图
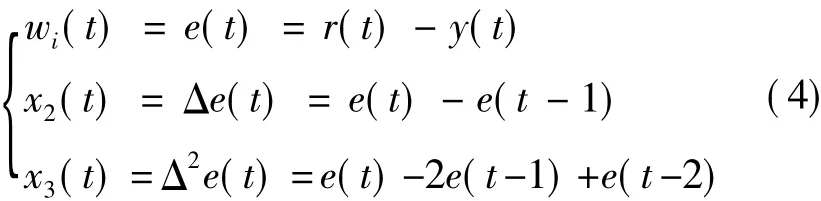
图5 中,用单神经元上的3个连接权来近似代替PID控制器中的比例(P)、积分(I)、微分(D)系数,实际输出信号与输入信号相比较得到偏差信号e(t),然后经过转换器转换后作为单神经元的输入信号 xi(t)(i=1,2,3),即:
4 仿真分析
4.1 建立模型
建立主动悬架的ADAMS仿真模型,如图6所示。
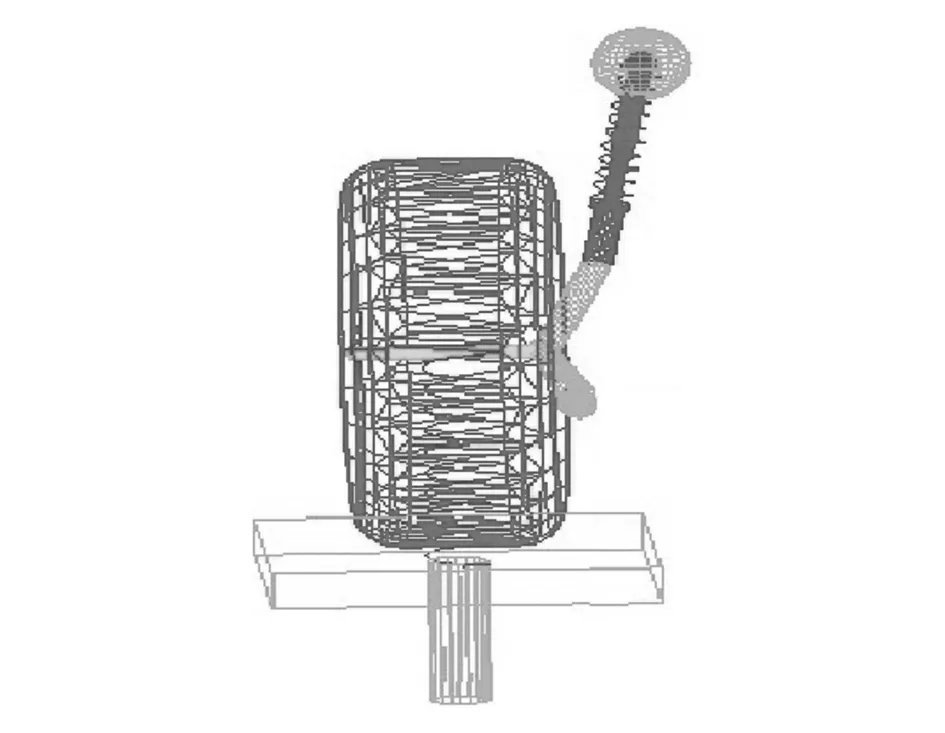
图6 主动悬架的三维模型
4.2 参数选取
引起汽车振动的因素有很多,如路面不平度、汽车运动时产生的空气动力载荷等原因,其中路面不平是汽车行驶时产生振动的最主要原因[5]。
仿真时,路面输入可以采用很多类型,本文采用随机路面输入,其曲线如图7所示。
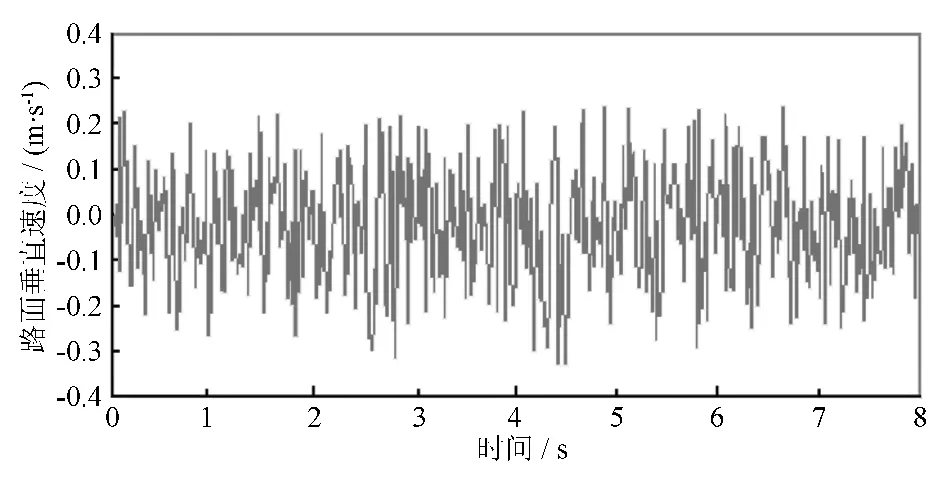
图7 随机路面输入曲线
其他模型参数如下:车轮质量40kg,车身质量300 kg,轮胎刚度160 000 N/m,悬架刚度16 000 N/m,悬架阻尼系数980 Ns/m。
4.3 联合仿真
与MATLAB软件进行联合仿真,分别采用被动悬架、传统PID控制策略和单神经元PID控制策略进行对比,得到的车身加速度仿真结果如图8~图10所示。
为了验证仿真模型的正确性以及所提控制策略的减振效果,分别提取3种控制类型所对应的车身加速均方根、悬架动挠度均方根和车轮动位移均方根进行列表对比,见表1。
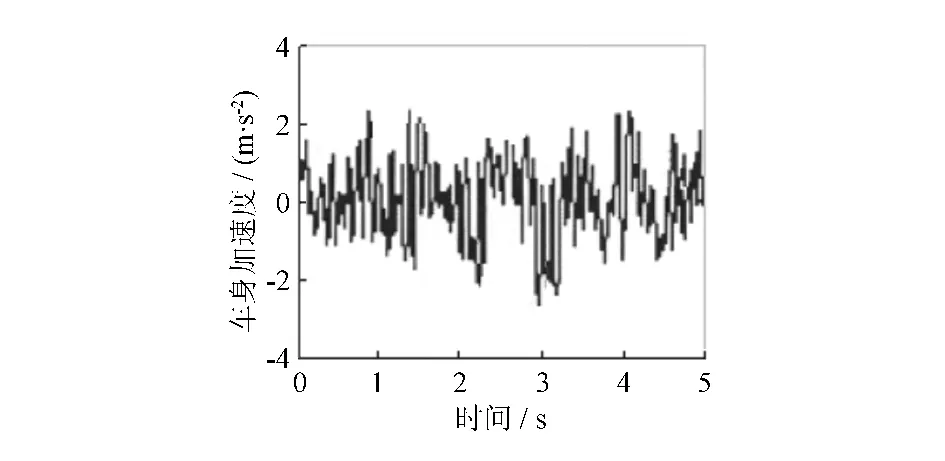
图8 被动悬架
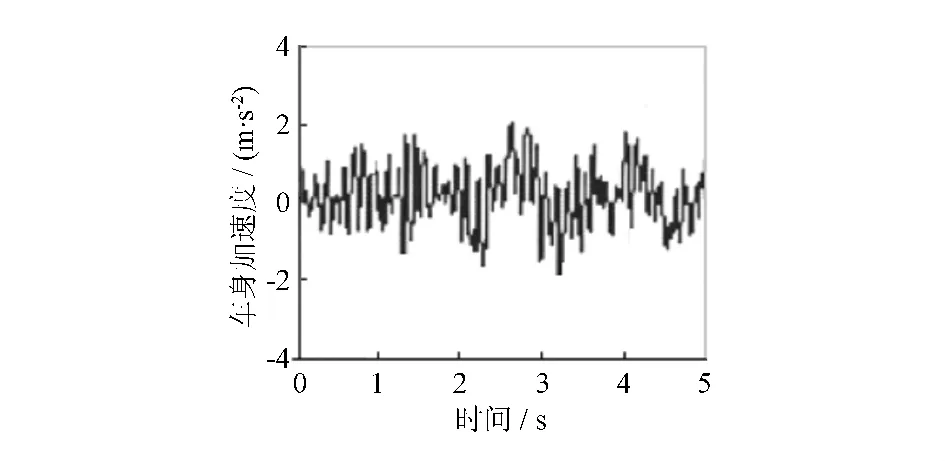
图9 传统PID控制策略

图10 单神经元PID控制策略
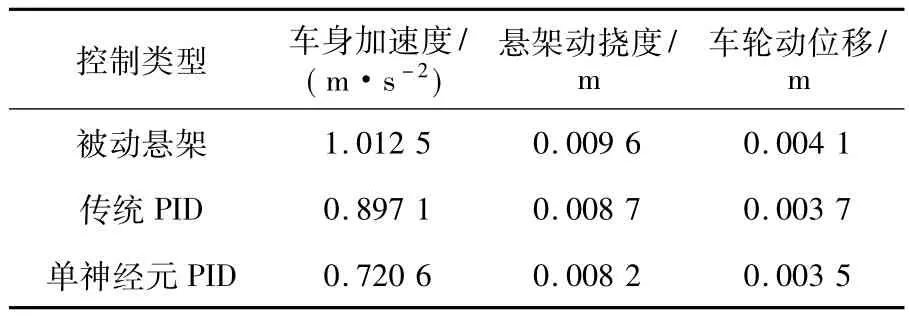
表1 联合仿真结果对比
结果表明,与被动悬架相比,主动悬架的车身加速度、悬架动挠度、车轮动位移都明显减小,改善了车辆的平顺性和稳定性。与传统PID控制相比,本文所提出的单神经元 PID控制策略的减振效果更好,鲁棒性更强。
5 结束语
本文针对汽车悬架系统存在的问题展开研究,提出一种单神经元PID控制方法应用于汽车主动悬架系统中,同时对虚拟样机进行仿真分析,并对车身加速度、悬架动挠度和轮胎动位移这3个指标进行综合评定。分析结果表明,主动悬架可以提高汽车行驶过程中的平顺性与操纵稳定性,从而减少汽车在行驶过程中产生的振动。与传统PID控制相比,单神经元PID控制策略具有更好的减震效果,具有更优的平稳性和鲁棒性,为主动悬架控制方法的选择问题提供了新的方法和思路。
[1] 王国权,许先锋,余群,等.汽车平顺性的虚拟样机试验[J].农业机械学报,2003,34(3):26-28,34.
[2] 王洪礼,牛西泽,孙景.汽车悬架系统的半主动控制[J].天津大学学报,1996,26(2):177-182.
[3] Chen C T,Yen C H.Multivariable process control using decentralized single neuron controllers[J].Journal of Chemical Engineering of Japan,1998,31(1):14-20.
[4] Guo S,Huang L.Periodic oscillation for discrete-time Hopfield neural networks[J].Physics Lettesr A,2004(3):199-206.
[5] 张云清,项俊,陈立平,等.整车多体动力学模型的建立、验证及仿真分析[J].汽车工程,2006,28(3):287-291.
猜你喜欢
天津外国语大学学报(2021年1期)2021-03-29
疯狂英语·新策略(2019年9期)2019-10-17
趣味(语文)(2019年5期)2019-09-02
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
北京汽车(2016年6期)2016-10-13
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
现代制造技术与装备(2015年4期)2015-12-23
汽车维护与修理(2014年10期)2014-02-28