高精度天线测试系统的研究与设计
2013-09-17 12:30张朋祥周鸣籁刘学观郭辉萍
通信技术 2013年1期
张朋祥, 周鸣籁, 刘学观, 郭辉萍
(苏州大学 电子信息学院,江苏 苏州 215006)
0 引言
随着射频技术的发展,现代通信设备要处理越来越多的信息,天线作为发送信息必需的设备,其性能的好坏直接影响通信过程,基站天线新旧影响能量消耗。在研究天线的传播特性及天线发射信号方向性的过程中,用解析分析和数值算法只能给出理论参考模型,并不能精确分析天线结构及制造过程和环境对它们的影响,必须通过实验的方法进行检验和修正理论模型。很多新型的天线,其方向性、增益等参数都有了很大提高,对天线测试系统提出了非常高的要求,鉴于此,提出一种新型的基于计算机和高精度设备的高精度天线测试系统[1-5]。
1 系统的软硬件介绍
此天线测试系统可以测量天线的相位方向图和幅度方向图,由硬件和软件两部分组成,接下来将对软硬件展开说明。
1.1 高精度天线测试硬件
典型的天线测试系统硬件组成必须包括以下部分:发射天线支架(源塔)、源塔控制器、源塔指示器、发射信号源控制器、受试天线定位器(天线转台)、定位器控制、定位器指示器、接收机、天线方向图记录仪等[6-7]。上述硬件系统包含组成部分较多,多部件组合要考虑系统兼容性等参数,容易导致测试精度不高。因此新型的天线测试系统必须简化结构,运用精度高,集成度高的硬件。本文描述的高精度天线测试系统主要由控制部分、天线转台和矢量网络分析仪组成,这三个部分就完成前面大量设备完成的功能。
控制部分主要由个人计算机(PC,Personal Computer)软件和相对应的硬件组成,可高精度地控制定位器(转台)运动和信号源信号的发射。PC机软件通过与安装在外设组件互连(PCI,Peripheral Component Interconnect)总线上的步进电机控制卡通信来控制三个接收转台上电机驱动器和一个发送转台上的电机驱动器,进而控制天线转台。用局域网(LAN,Local Area Network)接口连接PC与矢量网分仪,从 PC机向网分仪发送控制指令,并把网分仪测得的数据返回到 PC机上。硬件组成框图如图1所示。
天线转台可以实现方位角与俯仰角的转动,且转动精度较高,最小步进角度为0.0003度,相对普通天线转台步进角度0.05或0.1度有较大的提高。另外,此转台有平动机构和竖直抱杆,可以进行直线运动,用来纠正转台安装误差及进行水平方向的天线测试;也可以上下移动天线,使收发天线严格对准,进而提高测量精度。
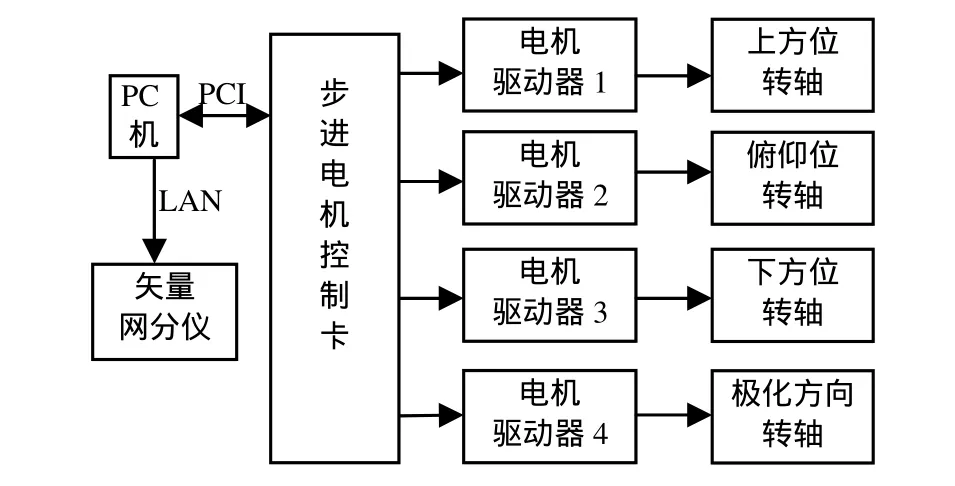
图1 硬件组成框图
矢量网分仪选用罗德与施瓦茨公司型号为ZVL13的矢网,其测量频率范围9 kHz~13.6 GHz,可测频率范围宽,有两个端口,可供接收与发送两个天线连接。另外,测量参数多样精度高。把网分仪作为接收机、发射机与信源控制的集合体,简化了测试系统结构,并且提高了测试精度与可靠性。
1.2 高精度天线测试软件
天线测试软件是天线测试系统最重要的组成部分之一,它给使用者提供了控制整个天线测试系统的界面,并显示天线方向图,完成天线参数的测试。另外,此软件还支持天线性能参数保存。总体来说天线测试软件主要包括三个部分:网分仪控制程序,天线转台控制程序及测试软件界面。
网分仪控制程序即控制网分仪的控仪器标准命令(SCPI,Standard Commands for Programmable Instruments)指令,包括设置待测的频率范围、频点数、待测参数类型等,它通过虚拟仪器软件架构(VISA,Virtual Instrument Software Architecture)被传送到网分仪。网分仪返回的数据也是通过VISA传输到测试软件,然后利用德州仪器公司的画函数曲线控件把数据转换成函数曲线显示在测试软件界面上。
天线转台控制程序即步进电机控制卡程序,它提供设置转动角度范围、转动初速度、加速度、最终速度和实时查询天线转台位置信息及速度的函数。当调用此函数时,控制卡向电机驱动器发出相应指令,使电机运转。
天线测试软件最重要的部分是测试软件界面,下面对其作具体描述:
(1)参数设置界面
此界面可设置待测的频率范围,一般应设置在天线的工作频段内。为保证天线测试的精确性和数据的高精度,还应把天线测试参数取平均,平均次数可自行选择。
为明确显示天线工作频段内某些频率点的值,可根据需要设置测量频点数。此外,需测天线幅度或相位及单位符号、发射与接收天线所连接的网分仪端口、天线转台转动的角度范围、转动速度,都可在此界面上设置。
(2)显示设置界面
利用此界面可找出天线最重要的工作频点,并把相应频点上的相位或幅度信息显示在测量界面中。图片的显示背景与函数曲线颜色和类型也要在此设置。右上角的图片为显示样例。
(3)测量界面
此界面主要功能是把角域和频域数据以函数曲线的形式显示出来,把转台的俯仰与方位信息以数字的形式显示。
(4)数据保存
用函数曲线显示的只是相应频率范围的几个测量点,并没有显示频段内所有的测量频点。可通过数据保存界面把所有的测量频点以文本文档的格式保存下来。同时可以选择保存角域或频域数据以及文件保存的路径。
(5)转台控制
转台控制界面如图2所示。天线测试初始阶段的天线对准操作要控制转台运动才能完成,而天线严格对准是高精度测试天线性能的基础。此界面可直接显示俯仰角与方位角,并可以单纯设置转台转动的角度及速度而不涉及天线性能测试操作,另外各个转轴可以单独控制也可以进行多轴插补控制。
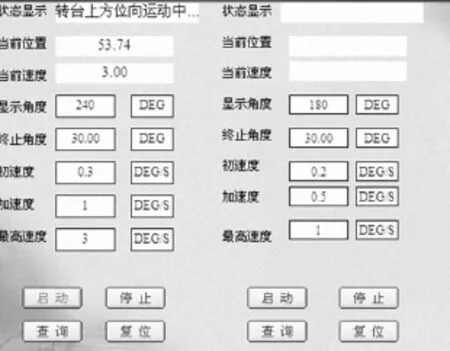
图2 转台控制界面
天线控制软件主要由以上几个部分组成,通过这几个界面的配合,就可以高精度的测试天线性能参数,如天线幅度方向图和相位方向图。既可以以曲线的形式显示,也可以文本文档的形式显示。图3所示为测试得到的函数曲线。纵坐标为测得的S21参数,可根据此参数算出天线在各个方位角的具体增益值,横坐标为方位角θ。
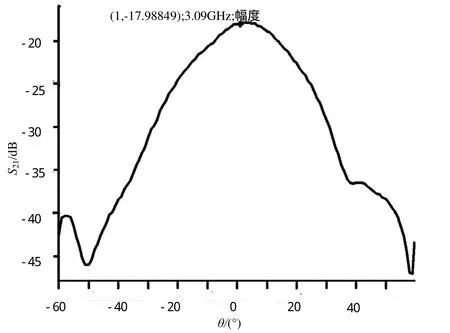
图3 接收天线收到信号的幅度方向图
2 标定天线相位中心
天线相位中心对于精确定位和测量的重要性越来越突出,其标定成为研究的重点。本文中提出的天线测试系统含有一维平动机构和方位转台,再利用此系统测出的天线的相位方向图数据即可进行此天线相位中心的标定。而且此系统用一维平动机构标定相位中心,比传统的用二维转台标定相位中心降低了很多成本。一维平动机构一般花费 1000~2000元,而二维平动机构由于技术要求高,两个平动机构要严格垂直,费用在一万元以上。以上数据差别非常明显,用一维平动机构可以明显降低预算。
天线相位中心的标定采用文献[8]中阐述的方法,步骤如下:首先测试天线相位方向图,然后利用方向图的数据和收发天线之间的距离计算出天线相位中心相对于现在转动中心极坐标位置,即找出ρ,θ的值,以这两个值为标准移动平动机构和方位转台,使转动中心和天线相位中心重合。继续重复上面的步骤,直至ρ,θ达到理想的值。图4为第一测量得到的天线相位方向图,横坐标为方位角 θ,纵坐标为相位φ。利用此方向图的数据,计算ρ,θ的值,并把转台作相应的移动,重新测量天线相位方向图,如图5所示。

图4 第一次测量得到的相位方向图
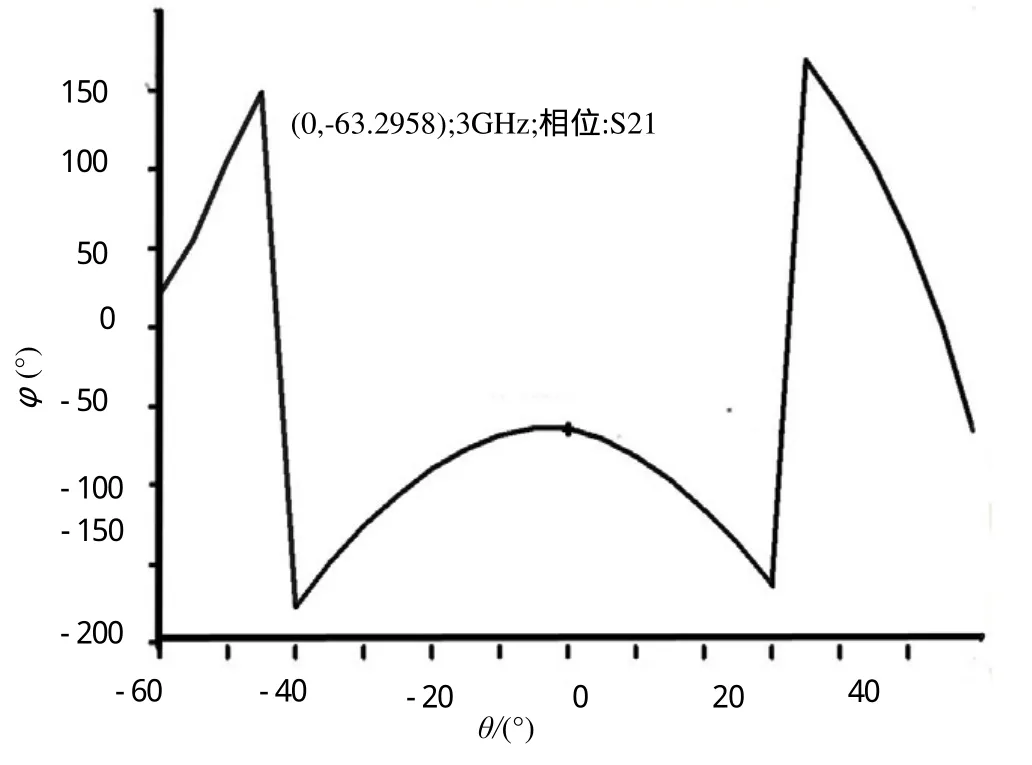
图5 第二次测量得到的相位方向图
从上图两个函数曲线可知,方位角-40°~+40°的角度范围内,相位方向图的上凸的程度已经变小,天线现在位置正在向天线相位中心逼近。多次重复进行此操作之后,即可完成天线相位中心的标定。
3 结语
天线测试系统作用主要是测试天线的性能参数,从而验证其是否满足要求,同时为天线的改进提供指导性意见。而高精度的测试系统更能真实的反应天线特性,较快发现其缺陷。本文提出的测试系统已在实验室的天线测试中得到了应用,测试新制作出的天线的方向图,找出不满足要求的地方,再进行有针对性的修改,最终使天线满足要求。前段时间有一家通讯公司用此测试系统测试新研发的天线,并利用测得的参数进行调试,最后把天线调试成功。此外,该测试系统还可进行天线相位中心的标定。综上所述,本文提出的高精度天线测试系统有广阔的应用前景。
[1] 刘昕,张华强,赵剡,等.应用于天线控制的组合导航系统设计[J].通信技术,2012,45(01):19-21.
[2] 何寿福.无线通信技术在测绘工程中的应用研究[J].通信技术,2012,45(07):94-96.
[3] 邓超,孙莉.基于反射系数的短波天馈线检测研究[J].通信技术,2012,45(08):41-43.
[4] 何力,余海,房利国.基于物联网的能耗检测系统解决方案[J].信息安全与通信保密,2012(01):67-71.
[5] 李福剑,李彦文.天线测试中的误差分析[J].船舶电子对抗,2007,30(01):115-118.
[6] 齐岩,汤斌,胡国良,等.天线测试平台系统设计与安装[J].计测技术,2009,29(02):33-35.
[7] Doug Moore.天线测试[J].现代电信技术,1999,4(04):24-27.
[8] 柯炳清,丁克乾.天线相位中心的推算及标定[J].遥测遥控,2009,30(06):66-69
猜你喜欢
现代信息科技(2020年9期)2020-08-17
汽车维修与保养(2020年11期)2020-06-09
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
电子制作(2018年17期)2018-09-28
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
电子技术与软件工程(2018年11期)2018-02-25
北京航空航天大学学报(2017年9期)2017-12-18
中国惯性技术学报(2017年1期)2017-06-09