基于ICP算法的计算机辅助肝脏手术空间配准技术①
2013-09-27 14:26韦韫韬周轶冰周东航李春洁
佳木斯大学学报(自然科学版) 2013年1期
韦韫韬, 周轶冰, 周东航, 李春洁
(1.佳木斯大学,黑龙江 佳木斯 154007;2.佳木斯市中心医院,黑龙江 佳木斯 154002)
0 引言
在计算机辅助肝脏手术中,精确的空间配准算法有着重大意义,也是一项非常重要的技术难点.有了良好的空间配准技术,医生可以在手术之前确定具体的病灶位置,做好相近的手术计划,从而为患者选择最佳的手术方案,还可以把患者的个体差异作为主要因素考虑进去.在术中,配准技术可以帮助术者避开重要的组织结构,尽量降低手术风险,减少手术给患者带来的损伤和痛苦,使手术更加高效、更加安全和可靠.另外,目前医院广泛使用的影像设备有很多种,例如:常用的CT、MRI、DAS以及PET,先进的手术空间配准技术和图像处理技术的配合应用,可以这些医学影像进行精确配准、多组融合、重新整合甚至通过计算机技术三维重构这些影像,使医生能够更加精准地观察到病灶并且准确定位,大大地提高了手术的安全性和可靠性.为了更加有效地检索和查询患者信息,医院使用计算机技术来统一管理患者的治疗计划、医疗影像等各种资料,也更加便于病人回访[1].
空间配准算法在计算机辅助肝脏手术中的研究已经有10多年,但原有配准技术的使用必须在术前对患者的影像资料进行特殊处理,所以需要高精度的术前影像扫描设备和高水准的手术设备相配合,即使这样,配准的效果仍然有些差强人意,因此并没有得到广泛的应用.本文介绍了一种空间配准算法—最近点迭代(ICP,iterative closest point)算法,这种配准算法克服了以上这些技术缺点,可以用来进行精确配准.这种空间配准算法通过反复迭代最小化误差来实现医学影像和实际空间的精准拼合,主要被用于计算机中医学深度图像与实际空间的配准.
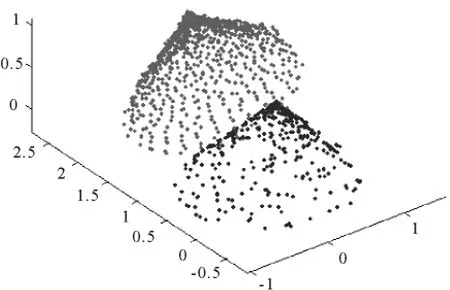
图1 P,Q两个空间点集
1 基于ICP算法的空间配准技术
1.1 ICP算法的数学模型描述
已知P,Q两个空间点集,其中P表示图像空间点集,Q表示手术空间点集,空间配准是通过变换找到一个P和Q之间的转换规则Tp-q,使得P中任意一点px经过Tp-q转换后都有唯一一点qx与之对应,即 P、Q内的点满足 qx=Tp-q(px),其中转换规则Tp-q可以被分解成一个旋转矩阵R和一个平移向量t,则有Tp-q=min(∑(qx- (R(px)+T))2),即当此式取最小值时,R、T为最佳的转换矩阵和向量[2].
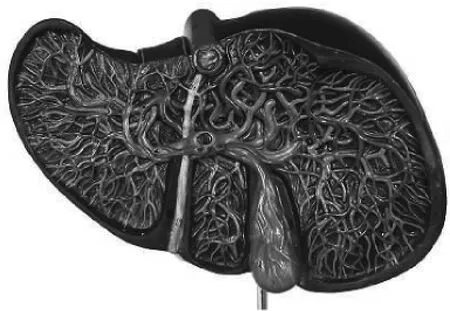
图2 实验用的肝脏模型
具体步骤如下:
①确定P集合中任意点所对应的近距离点集.对于P中任意一点px,在Q中找到距离该点最近的对应点的集合Q’.
②计算最小误差平方和.利用ICP数学模型变换方法,找到使得∑(qx-(R(px)+T))2最小的旋转矩阵R和平移向量T.
③利用R,T进行点集转换.对于已知集合的所有点通过R,T进行变换,从而得到新的点集P'={px'|px'=R(px)+T ,x=1、2……}.④计算误差.利用P'和Q'两个点集计算误差,如果误差小于预设的阀值e,则停止;否则,用P'代替P,重复上述步骤.
1.2 ICP算法初始值的确定
ICP算法的目的是找到图像数据和手术数据之间的旋转矩阵R和平移向量T,为了减少迭代次数,消除局部收敛,在ICP算法中可以使用SVD法和四元数法来初步确定R.
1.2.1 SVD 法
SVD是一种以误差平方和最小值为基础,设定初始旋转矩阵和平移向量的方法,可以选择使用matlab中的SVD函数来进行计算.具体代码如下[3]:
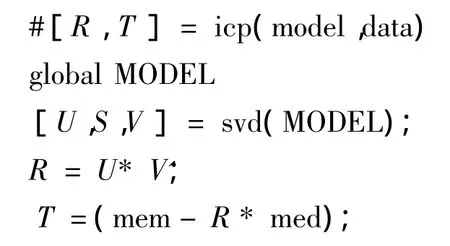
SVD算法的使用非常简单,但是计算时间长,在后期的仿真实验中比较得出,四元数法比SVD法效果更好.
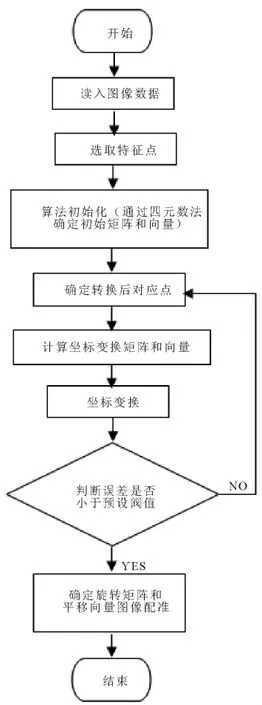
图3 配准过程流程图
1.2.2 四元数法
首先利用四元数法找到旋转矩阵R,假设r是一个三维的向量,因此需要一个标量和三个矢量来表示,令r=r0+r1i+r2j+r3k,其中=1,可以由 r0,r1,r2,r3来表示旋转矩阵 R 为:
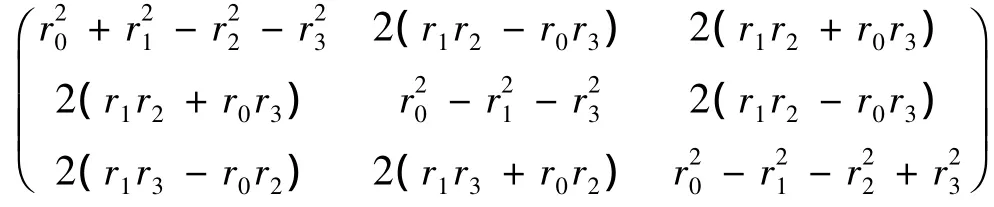
其次借助P,Q两个点集构造协方差矩阵以及两点集的质心,通过一系列变形计算可以得到旋转矩阵R,则平移向量t=q-Rp.
在matlab仿真实验中,使用四元数法操作函数如下所列:
①模(Modulus):quatmod(p)
②范数(Norm):quatnorm(p)
③单位化(Normalize):quatnormalize(p)
④求逆(Inverse):quatinv(p)
⑤四元数除法:quatdivide(q,p)
⑥四元数乘法:quatmultiply(p,q)
⑦共轭四元数:quatconj(p)
另外还有旋转函数quatrotate、四元数和欧拉角互换的函数quat2euler、euler2quat
2 仿真实验
2.1 实验图像的获取
以肝脏模型作为实验对象,实验前对其进行CT扫描,采用GE MEDICAL SYSTEM HISpeed螺旋CT设备.具体扫描参数如下[4]:管电压120kVp,管电流*曝光时间250mAs,层厚5mm,层距的选择与层厚同步,旋距1,窗宽150~200Hu,窗位40~50Hu,CT 视野(FOV)35cm*35cm -40cm*40cm.将CT数据利用DICOM3.0标准的读取模块导入,进行层间插值处理,获得各向同性分辨率的图像.
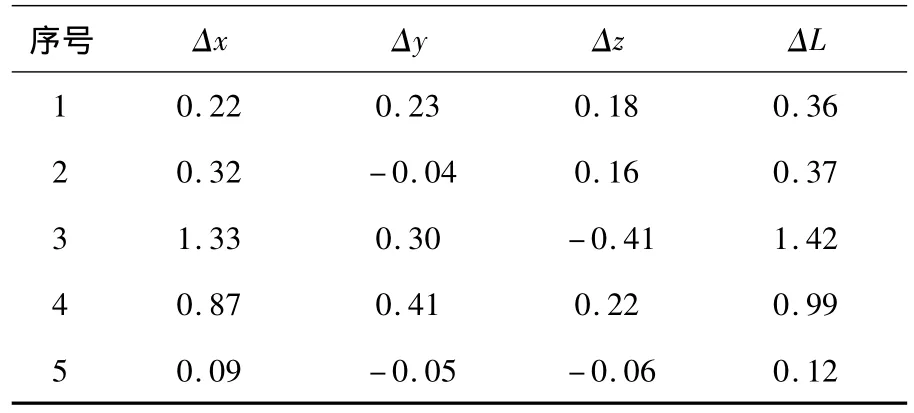
表1 特征点误差 mm
由表中数据计算出平均误差为0.65mm,在可接受范围内.
2.2 实验过程
为了更好地模拟仿真实验过程,首先分割CT图像,利用区域生长算法确定肝脏曲面的离散点坐标,从而分割出肝脏轮廓.其次利用基于肝脏轮廓线的曲面重建算法,三维重构肝脏模型.然后根据肝脏的生理解剖结构,利用探针获取五个仿真实验用的特征点.最后将肝脏模型上的五个特征点通过配准算法映射到模型空间,测量映射点的三维误差,计算这些点与实际对应点之间的误差.具体的配准流程见图3.
2.3 实验结果
配准结束后,测量映射点的三维坐标,计算误差,预设的五个特征点与实际位置的误差值如表1所示.
3 结束语
本文提出一种计算机辅助肝脏手术中基于ICP的空间配准算法,利用四元数法确定迭代初始值,通过模拟的仿真实验可以得出,配准误差基本控制在1mm以内,精度较高,可以广泛推广.
[1]Peters T M.Image-guided Surgery and Therapy:Current St At Us and Future Directions[A].Proceedings of SPIE the International Socie ty for Optical Engineering[C].London:The MUT Press,2001:1- 12.
[2]Gunkel A R,Thunmf art W F,Freysinger W.Computer Aided 3- Navigation Systems[J].Survey and Location Determination,2000,48(3):75- 90.
[3]计算机辅助导航系统与脊柱外科:数字化技术更安全[J].中国组织工程研究与临床康复,2010(26).
[4]王田苗,刘文勇,胡磊,等.医用机器人与计算机辅助手术MRCAS进展[J].中国生物医学工程学报,2008(01).
猜你喜欢
中老年保健(2022年4期)2022-11-25
肝博士(2022年3期)2022-06-30
新高考·高一数学(2022年3期)2022-04-28
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19
当代水产(2019年9期)2019-10-08
中央民族大学学报(自然科学版)(2016年3期)2016-06-27
高中生学习·高三版(2016年9期)2016-05-14
新高考·高二数学(2015年11期)2015-12-23
南都周刊(2015年4期)2015-09-10
南都周刊(2015年3期)2015-09-10