
带有母线电压控制的异步电机矢量控制策略
2013-11-21 08:00徐立波
电机与控制应用 2013年9期
徐立波,阮 毅,宗 剑,柳 巍
(上海大学机电工程与自动化学院,上海 200072)
0 引言
架线式交流电机车是矿山地面和井下广泛使用的一种运输工具,通过机车受电弓获取架设在运输轨道上的架空线电能[1]。交流电机车的母线电压易受实际工况和电机运行状态影响:机车的受电弓与架空线属于不可靠连接,跳弓现象时有发生,母线电压因供电中断而出现欠压;电机在制动状态时,母线电压因电机动能回馈产生泵升电压而导致过压。
为尽可能避免电机车系统因母线电压较大波动触发欠压、过压故障保护,造成控制中断,需研究矢量控制策略下的母线电压控制方法。文献[2-5]针对母线电压控制,提出了各种方法。文献[2-3]提出在矢量控制转矩环的给定值上增加附加转矩以控制电机转矩输出,实现母线电压控制的方案。该方案结构简单,只需在传统的控制方案中加入前馈环节,但对前馈环节缺乏具体设计。文献[4]提出了一种抑制母线电压因暂时失电而发生欠压保护的方案,即通过将电机从电动模式切换至制动模式,将电机动能回馈至母线,维持母线电压恒定。该方案需要在两个模式间相互切换,切换过程中系统易产生波动。文献[5]提出了一种抑制母线电压过高的策略,采用电压外环、功率内环的双环控制,实现电机减速时对母线电压的精确控制。该方案需实时计算电机回馈的功率,计算量较大。
本文提出在矢量控制转矩电流给定值上加入一个前馈环节,实现对母线电压的控制。提出的方案无需进行模式切换,计算量小,前馈环节设计简单。MATLAB仿真验证了该方案的有效性。
1 矢量控制系统
1.1 传统的矢量控制方案
传统的矢量控制方案框图如图1所示[6]。方案采用按转子磁链间接定向的有速度传感器控制策略,以转速作为外环,定子电流励磁分量及转矩分量作为内环。如式(1)和式(2)所示,速度传感器测得的转速与计算得到的转差相加后得到电机同步转速,对同步转速积分后得到用于坐标变换的定向角。定子电流按定向角进行旋转变换后,得到定子电流的励磁分量isd和转矩分量isq。如式(3)和式(4)所示,isd和isq分别实现对电机的转子磁链ψr和电磁转矩Te的控制。

图1 传统的矢量控制方案框图
1.2 具有母线电压控制的矢量控制方案
传统的矢量控制方案中母线电压不作为控制目标。当母线电压过高或过低时,采用故障保护的方式中断控制。当系统供电不稳定时,或电机快速制动造成显著的泵升电压时,系统极易引起欠压和过压故障保护,降低了系统可靠性。
本文提出具有母线电压控制的矢量控制方案。控制框图如图2所示,在转矩电流给定值上加入一个前馈环节,抑制母线电压的升高或降低。当母线电压在正常范围内时,前馈环节不起作用;当母线电压过低或过高时,如式(5)所示,前馈环节AUdR输出值与转速调节器ASR输出值相加后作为定子电流转矩分量给定值。前馈环节的加入改变了值,由式(4)可知,改变值将改变电机的输出转矩和运行状态,继而改变能量流动大小和方向以控制母线电压稳定。

图2 具有母线电压控制的矢量控制框图

2 母线电压控制方法
2.1 母线电压控制前馈环节
ud_n为母线电压额定值,ud_min1和ud_max1分别对应正常电压值的下限和上限,ud_min2和ud_max2分别对应引起欠压保护和过压保护的电压值,ud_Ron和ud_Roff分别对应开放和关闭制动电阻的电压值。7个电压值关系如式(6)所示:

前馈环节控制母线电压值,以避免大幅偏离额定值产生欠压或过压保护。为了使控制效果更显著,当电压值偏离越大,前馈环节的输出也应增加,且母线电压允许与给定值存在一定的偏差,无须稳态静差为零,故选择比例环节。
前馈环节的控制框图如图3所示,分为欠压和过压两个模块。前馈环节的输入为母线电压udc,与欠压阈值ud_min1和过压阈值ud_max1比较后得到输出值。欠压和过压模块的比例系数分别为K1和K2。当 ud_min1<udc<ud_max1时,表明母线电压在正常范围内,输出值为零;当udc<ud_min1时,欠压模块有输出;当udc>ud_max1时,过压模块有输出。对应的关系式如式(7)所示:

图3 前馈环节控制框图
当母线电压出现欠压或过压使前馈环节参与控制后,给定转速和实际转速的偏差增加,必然导致转速调节器的输出快速达到饱和,前馈环节的最大输出需完全抵消转速调节器的饱和值,并留有一定裕量。例如电机正向电动运行时出现欠压,前馈环节输出的使电机转速下降,转速调节器正向饱和,转速调节器输出为了使电机处于制动模式,即据式(5),则同时,系统处于欠压和过压情况下,允许的极限电压分别为ud_min2和ud_max2,并考虑留有50%的电压裕量,则有K1和K2的计算公式如式(8)和式(9)所示:
需要指出的是,当电机运行在电动模式下出现过压或制动模式下出现欠压表明供电电源非正常,电压控制对此无能为力,故不参与前馈控制。
2.2 越过暂时失电控制
越过暂时失电控制是当母线电压欠压,即低于ud_min1时,通过电机减速,将部分动能回馈至母线侧,维持一个较低的母线电压值,使控制电路继续工作,待供电恢复后电机重新加速到原转速。
以电机正向电动运行为例,图4为发生短暂失电时母线电压、电机的转速和转矩波形。
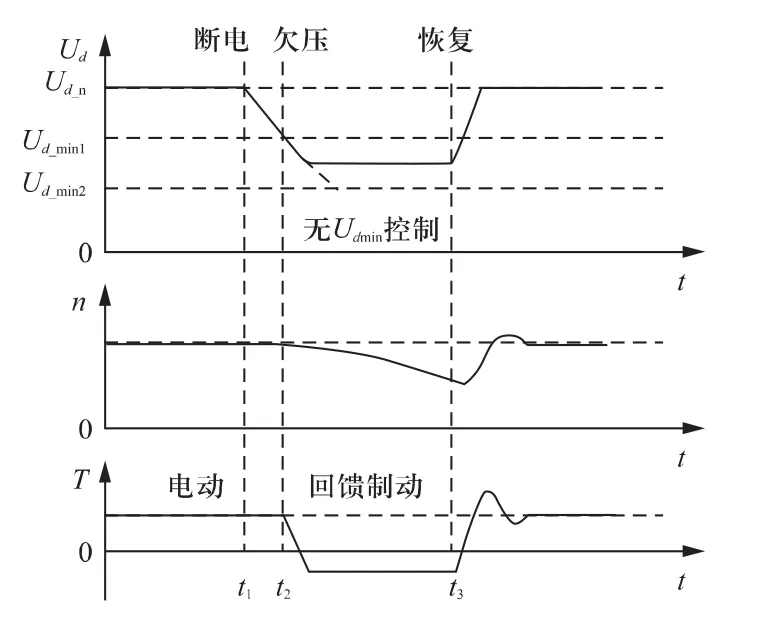
图4 发生短暂失电时母线电压、电机转速和转矩波形
由图4可知,当t1时刻供电电源断开,母线电压逐渐降低。t2时刻母线电压达到欠压值,前馈环节开始作用,输出的,其绝对值逐渐增加,使<0。电机从电动运行转换至制动运行,转速下降,能量回馈至母线,维持母线电压值高于欠压保护值。当t3时刻供电电压恢复后,前馈环节迅速退出控制,电动机重新加速至原转速。
2.3 抑制过压控制
矿用电机车架空线采用不可控整流桥供电。当电机运行在制动模式时,母线电压易因电机动能回馈而产生泵升电压,继而触发过压保护。因此直流母线上须有制动回路,串接制动电阻。当发生过压时,制动回路接通,制动电阻消耗母线能量并降低母线电压。一种方案是减小制动电阻的阻值,快速消耗回馈动能,减少过压保护的发生,但制动电阻阻值的选取受到器件限制,有时仍需采用抑制过压控制,减少过压保护的发生。抑制过压控制的原理是当电压接近过压保护值时,减小回馈至母线的能量,维持电压低于过压保护值。
以电机正向制动运行为例,图5为制动过程中母线电压、电机的转速和转矩波形。

图5 制动过程中母线电压、电机转速和转矩波形
由图5可知,t1时刻电机开始制动运行,电机转速迅速下降,母线电压逐渐升高。t2时刻母线电压达到过压值,前馈环节开始作用,输出的>0,使绝对值减小,对应制动力矩减小,转速下降趋缓,回馈母线能量减少,母线电压不再上升。随着电机实际转速接近给定转速,母线电压下降,当t3时刻母线电压下降至正常值时,前馈环节退出控制,电动机重新在新的转速下稳定运行。
3 仿真验证
为验证越过暂时失电控制和抑制过压控制的性能,使用MATLAB搭建了仿真平台。仿真电机参数如下:PN=22 kW,UN=220 V,f=40 Hz,IN=82 A,n=590 r/min,Te=356 N·m,Rs=0.037 9 Ω,Rr=0.025 2 Ω,Ls=0.019 0 H,Lr=0.019 6 H,Lm=0.018 5 H,np=4,J=0.6,星型接法。电源采用220 V/50 Hz三相电源,对应母线电压为310 V,母线电容容量8 000 μF。
仿真试验包括两个部分:(1)越过暂时失电控制仿真;(2)抑制过压控制仿真。
3.1 越过暂时失电控制仿真
对于越过暂时失电控制仿真,设定正常母线电压下限值ud_min1=264 V(85%额定电压),引起欠压保护的母线电压值ud_min2=232 V(75%额定电压)。图6(a)为采取越过暂时失电控制后的直流母线电压波形,图6(b)为电机的转速和转矩波形,图6(c)为前馈环节输出和转矩电流给定值的波形。由图6可知,当t=1 s时,带0.25倍额定负载稳定运行于500 r/min,并在t=1.1 s断开电源模拟跳弓现象,母线电压先逐渐下降,当Udc<264 V时,前馈环节开始作用减小,电机逐渐从电动状态转换至制动状态,电机转速逐渐下降,动能回馈至母线端使母线电压稳定在约250 V,维持电压值高于图6(a)虚线标注的欠压保护值。当t=1.4 s电源恢复后,母线电压迅速上升,前馈环节退出作用,电机也逐渐升速恢复至原转速。
如图7所示,若不采取越过暂时失电控制,在t=1.17 s时,母线电压因低于232 V触发欠压保护,系统需重新起动才能运行。可见越过暂时失电控制能保持母线电压值,尽量避免触发欠压保护。
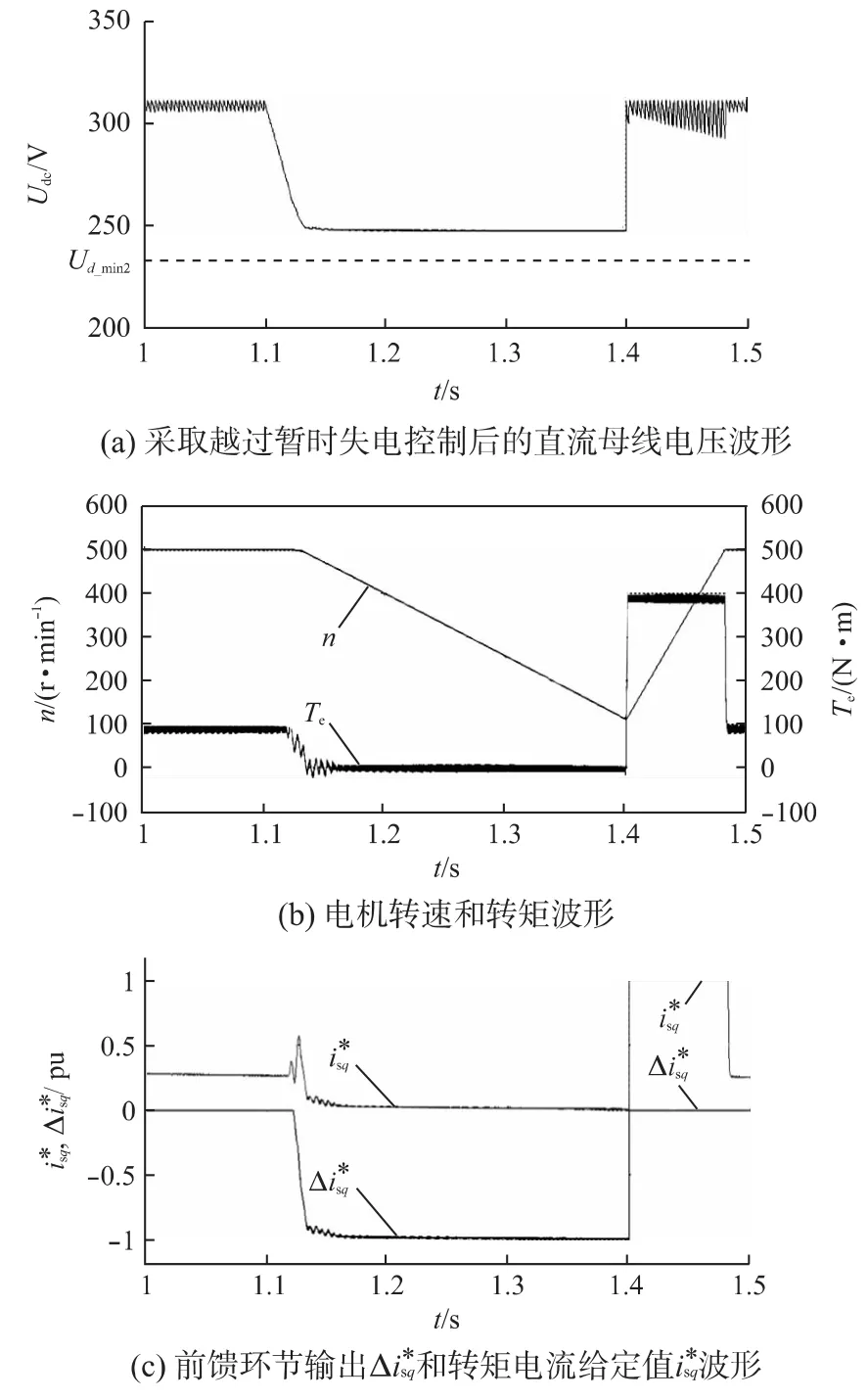
图6 越过暂时失电控制仿真波形
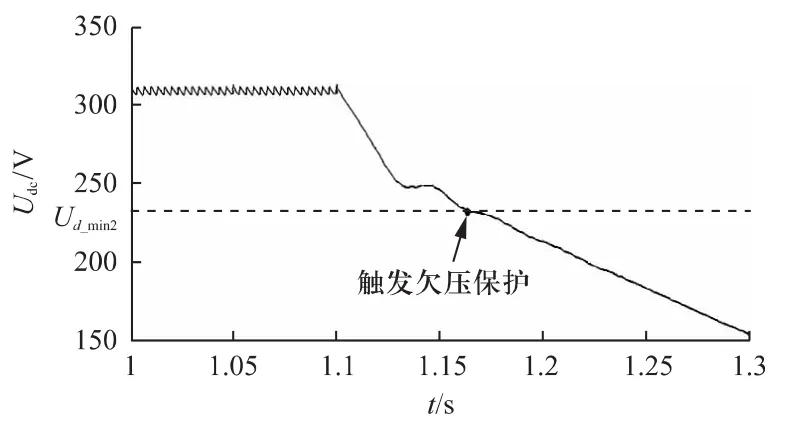
图7 未采取越过暂时失电控制后的直流母线电压波形
3.2 抑制过压控制仿真
抑制过压控制仿真,设定正常母线电压上限值ud_max1=358 V(115%额定电压),引起过压保护的母线电压值ud_max2=404 V(130%额定电压)。与欠压不同,当母线发生过压时,需接通制动回路,将过多的母线电容电量消耗在制动电阻上。因此,需配置接通和断开制动电阻的电压值及制动电阻阻值。为避免频繁接通和断开制动电阻,接通电阻的电压取ud_Ron=355 V,断开电阻的电压取ud_Roff=345 V,两者存在一个滞环。制动电阻分别选取R=5 Ω和R=1 kΩ进行仿真验证。
首先选取制动电阻R=5 Ω。图8(a)为直流母线电压波形,图8(b)为电机的转速和转矩波形,图8(c)为前馈环节输出和转矩电流给定值的波形。当t=1 s时,电机带额定负载运行于500 r/min。当t=1.1 s时,转速给定为零,电机转速下降,电机动能迅速回馈至母线端导致电压上升,当母线电压超过ud_Ron时,制动回路接通,母线电压下降至低于ud_Roff,制动回路断开。之后,由于电机仍有持续的动能回馈,制动回路再开断4次后电机转速稳定在零速。在制动过程中,由于制动电阻阻值小,回馈的电能能迅速通过制动回路释放,母线电压未超过正常母线电压上限值ud_max1,抑制过压控制的前馈环节未参与控制。
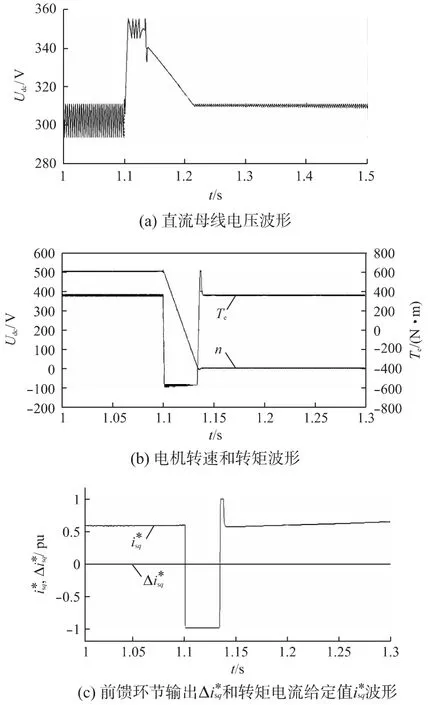
图8 制动电阻R=5 Ω,电机带额定负载,给定转速从500 r/min突变至零速仿真波形
选取制动电阻R=1 kΩ。图9(a)为直流母线电压波形,图9(b)为电机转速和转矩波形,图9(c)为前馈环节输出和转矩电流给定值的波形。当 t=1 s时,电机带额定负载运行于500 r/min。当t=1.1 s时,转速给定为零,电机转速下降,电机动能迅速回馈至母线端导致电压上升,当母线电压超过ud_Ron时,制动回路接通,由于电阻阻值较大,母线电容增加的回馈电能无法完全释放,母线电压继续上升,抑制过压控制的前馈环节于t=1.11 s参与控制幅值减小,电机回馈至母线的电能减小,母线电压维持在约380 V,低于过压保护值404 V。当电机转速减至零后,母线电压逐渐下降,制动回路断开,之后恢复至正常值。
如图10所示,若不采取抑制过压控制,t=1.12 s时母线电压因高于404 V触发过压保护,系统需重新起动才能运行。可见抑制过压控制能限制泵升电压,尽量避免触发过压保护。

图9 制动电阻R=1 kΩ,电机带额定负载,给定转速从500 r/min突变至零速仿真波形
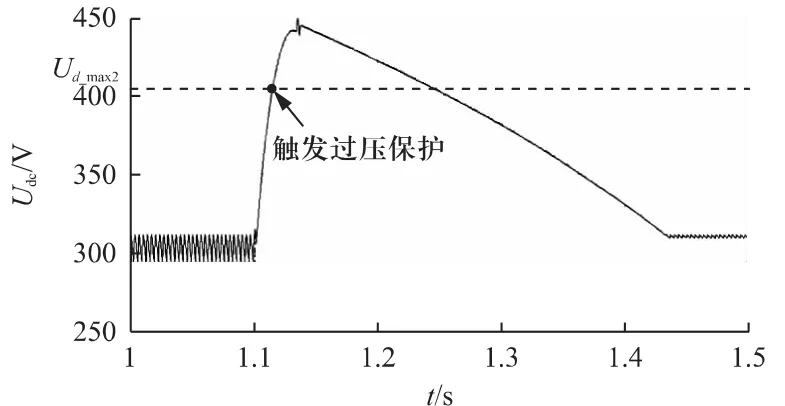
图10 未采取抑制过压控制的直流母线电压波形
4 结语
在传统的矢量控制策略中加入了一个前馈环节,实现越过暂时失电和抑制过压控制,以减缓因系统暂时失电或电机能量回馈造成的母线电压大幅波动,尽量避免系统触发过压和欠压保护。仿真结果验证了两种电压控制策略的可行性和实用性。
越过暂时失电控制对于供电不可靠的架线电机车系统具有应用价值。抑制过压控制则能根据不同的电机回馈功率、母线电容容量及放电电阻的配置方式自动控制回馈能量,既减少制动时间,又避免造成母线过压保护。电压控制策略的应用将提高系统运行的连续性、稳定性和可靠性,对于提高工业生产效率具有一定意义。
[1]程红,李真山,李军.矿用架线机车直流馈线的微机保护[J].煤炭科学技术,2010,38(12):85-88.
[2]马小亮.变频调速典型控制系统(二)[J].电气传动,2012,42(2):78-80.
[3]马小亮.高性能变频调速及其典型控制系统[M].北京:机械工业出版社,2010.
[4]HOLTZ J,LOTZKAT W,STADTFELD S.Controlled AC drives with ride-through capability at power interruption[J].IEEE transactions on Industry Applications,1994(30):1275-1283.
[5]李润,肖庆清.一种抑制变频器过压失速的方法及装置[P].中国专利:CN102136719A,2011.
[6]阮毅,陈伯时.电力拖动自动控制系统——运动控制系统[M].北京:机械工业出版社,2009.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
山东电力高等专科学校学报(2019年5期)2019-11-01
中国新技术新产品(2019年8期)2019-05-21
科技创新与应用(2019年3期)2019-02-28
自动化与仪表(2018年7期)2018-07-31
科技创新导报(2017年11期)2017-06-15
现代防御技术(2016年1期)2016-06-01
通信电源技术(2016年1期)2016-04-16
新高考·高一物理(2016年1期)2016-03-05
