形状记忆合金驱动器的研究现状及展望*
2013-12-03 04:31徐小兵邓荆江
机械研究与应用 2013年6期
徐小兵, 邓荆江,2
(1.长江大学 机械工程学院, 湖北 荆州 434023; 2.江汉石油管理局技术监督处, 湖北 潜江 433124)
1 前 言
形状记忆合金是一种兼有感知和驱动功能的新型功能材料,具有形状记忆效应、超弹性效应、高阻尼特性、抗疲劳效应、很好的抗腐蚀能力以及生物相容性等优点,在航空、航天、工程、医学、驱动器的感知和驱动等领域得到了广泛的应用[1-4]。
目前在驱动器的基础研究和应用开发研究方面,最常用的形状记忆合金分别是:温控形状记忆合金(Shape Memory Alloy,SMA)和磁控形状记忆合金( Magnetically Controlled Shape Memory Alloy,MSMA)。温控形状记忆合金是通过温度的变化诱发马氏体相和母相之间的可逆相变实现形状记忆功能的,它具有较大的可逆恢复应变和大的恢复力;而磁控形状记忆合金则是通过外加应力场和磁场诱发马氏体相变而产生形状记忆效应,它同时兼有大恢复应变、大输出应力、高响应频率和可精确控制的优良特性[5-8]。形状记忆合金与其他材料的性能对照表如表1所列。

表1 形状记忆合金与其他材料性能对照表[9]
2 SMA驱动器的工作原理及应用
2.1 SMA驱动器的工作原理
SMA驱动器是一种利用SMA的形状记忆效应和高温相和低温相相互转变过程中产生的变形对外做功的自动化装置。其工作实质是:在低温马氏体状态下使SMA元件发生变形,在升温的过程中通过形状记忆效应对外输出位移并做功。
一种典型的温控形状记忆合金驱动器的工作原理如图2所示[10-11]。驱动元件采用NiTi合金,将其做成螺旋弹簧形式。低温时母相转变为马氏体相,形状记忆合金弹簧变软,由于气体压力的作用,形状记忆合金弹簧被压缩,关闭阀门。温度上升到室温时,形状记忆合金弹簧中的马氏体逆相变为母相,产生较大的形状恢复力,克服气体压力,使形状记忆合金弹簧伸长,打开阀门[12-14]。
2.2 温控形状记忆合金驱动器的应用
在应用研究方面比较常见的SMA驱动器是单程驱动器和双程驱动器:单程驱动器结构简单、可靠性好,但不能实现往复运动;而双程驱动器无需外力的干预,系统自身可以自动实现往复运动。因此工程应用中比较常用的是双程驱动器。而双程SMA驱动器按照所用偏置元件的不同分为差动式双程SMA驱动器和偏动式双程SMA驱动器两类。下面主要介绍这两种典型的SMA驱动器[15]。
第一种:差动式双程SMA驱动器。它是利用两个以上SMA元件组合而成实现双程动作特性的。它的工作原理如图3(a)所示。差动式驱动器的两侧都用SMA元件,当对一侧SMA加热而对另一侧的SMA冷却时,由于两根SMA 作用于驱动器的合力作用而使驱动器向一侧旋转。同理,反向加热和冷却时,驱动器可以向相反方向旋转。差动式驱动器要比偏动式驱动器控制复杂,因为要对两侧的SMA弹簧分别加热和冷却[16-17]。
第二种:偏动式双程SMA驱动器,它是利用单程SMA元件和其它部件组合在一起实现双程动作的。它的工作原理如图3(b)所示。偏动式驱动器的两侧,一根为SMA,另外一根为普通弹簧,加热SMA即输出偏置力,SMA和弹簧作用于驱动器的合力使驱动器向SMA一侧偏转。当对SMA进行冷却时,驱动器将向普通弹簧一侧偏转[18-19]。
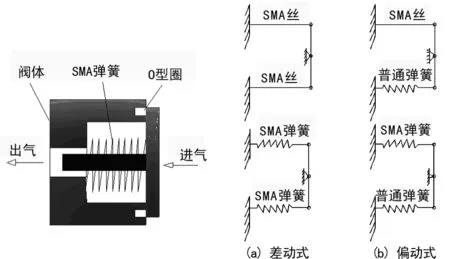
图2 微型阀结构图[10] 图3 双程SMA驱动器
3 MSMA驱动器的工作原理及应用
3.1 磁控形状记忆合金驱动器的工作原理
MSMA驱动器是一种利用MSMA的奥氏体相在外加磁场的作用下产生马氏体相而发生形状的改变,通过改变温度或去掉磁场的方式经逆相变恢复到原来的奥氏体相,同时产生较大的回复力,从而对外做功的自动化装置[20-21]。
一种典型的磁控形状记忆合金驱动器的工作原理如图4所示。图中磁场由电磁铁产生,磁场大小与方向可通过调节电磁铁励磁绕组的电流控制。当励磁绕组里有电流通过时,电磁铁产生垂直于MSMA元件的磁场,则MSMA元件在磁场的作用下发生伸长变形。磁场去掉以后,MSMA元件保持变形后的形状不变,此时通过加在MSMA元件上的弹簧压力使其恢复变形,从而实现驱动功能[22-23]。
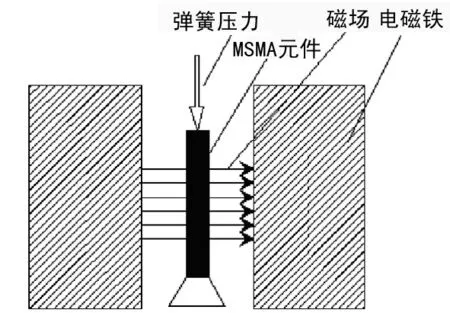
图4 磁控形状记忆合金驱动器的工作原理
3.2 磁控形状记忆合金驱动器的应用
目前国外如芬兰的AdaptaMat公司已将NiMnGa合金作为驱动材料应用于驱动器的制造中[24]。国内也有对MSMA驱动器的开发和研究作了大量工作的,如大连理工大学、华中科技大学、沈阳工业大学等。下面主要介绍沈阳工业大学研究的三种典型的MSMA驱动器。
第一种:根据仿生学蠕动原理将MSMA小步距的位移连续累加形成所需的大行程的驱动器即蠕动型直线驱动器如图5所示[25-26]。将MSM材料固定在一个长型槽内,一连杆与其相连,连杆带一弹簧,移动轴左右分别装设一夹钳,两夹钳分别固定在底座和连杆上。它的工作原理为:欲使移动轴向右移动,在施加磁场前,先将左夹钳松开而右夹钳夹紧。当施加外磁场之后,由于移动轴被右夹钳夹紧,MSM在磁场作用下沿水平方向向右伸长,带动移动轴向右移动。在去掉磁场前,使左夹钳夹紧而右夹钳松开,当磁场去掉后,因轴被左夹钳夹住,MSM在弹簧作用下收缩恢复原形,相当于驱动器移动轴向右移动一步,重复上述操作,直线驱动器便可连续运动,改变左右夹钳控制顺序便可使其反向运动[27]。
第二种:根据带恢复弹簧的MSMA驱动器磁场励磁功率大、恢复弹簧压力不易调整和MSMA变形受温度影响比较大的等缺点,研制了一种差动式MSMA驱动器如图6所示[28-29]。两块相同的永磁体用来产生偏置磁场,左右两侧相同的励磁线圈用来控制磁场。它的工作原理为:当励磁线圈的电流为零时,通过上下两块MSM元件的磁场都仅有永磁体产生,而两块永磁体是一样的,产生的磁场大小也应该相同,所以处于两块MSM元件中间的连杆停在中间位置。当励磁线圈里有电流通过时,由励磁线圈产生的磁场将在增强通过一个MSM元件的磁场的同时削弱通过另一个MSM元件磁场。当通过上下两块MSM元件的磁场大小不一样时,MSM元件的变形也不一样,连杆随之发生偏移。MSM驱动器连杆的位置可以通过改变励磁电流的幅值与方向来控制[30-32]。
第三种:在差动式MSMA直线驱动器的基础上,研制了一种旋转式MSMA驱动器如图7所示[27]。它是一种通过超越离合器将MSMA元件产生的直线运动变为旋转运动的驱动器,在永磁体偏置磁场基础上,通过改变控制磁场励磁电流的大小和频率可实现转速控制。
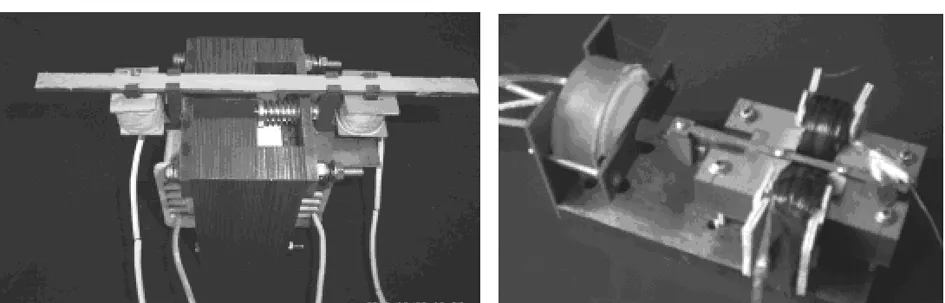
图5 蠕动型直线驱动器 图6 差动式MSMA驱动器
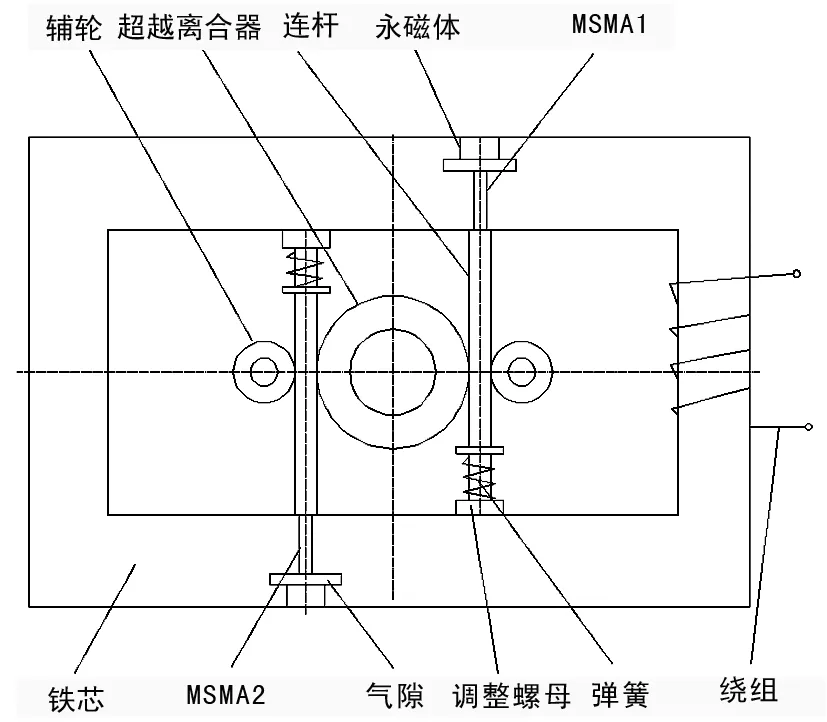
图7 旋转式MSMA驱动器
4 总结展望
形状记忆合金驱动器与其他驱动方式相比,有以下优点:①驱动器的功/重比大;②驱动机构简单;③驱动器工作时无污染和噪音;④SMA具有传感功能;⑤驱动电压低。
目前,对于形状记忆合金驱动器的研究虽然取得了一定的进展,然而在材料研发方面和具体应用方面还有一些问题需要进一步研究:
(1) 形状记忆合金驱动器的响应速率,不仅取决于加热速度,而冷却速度也直接影响其响应速率,因此在设计驱动器时,为了达到理想的响应速率,需要研究更便捷的冷却方法。
(2) 温控形状记忆合金驱动器的动作是依靠温度变化而实现的,如果只依靠环境温度的变化,温控形状记忆合金驱动器的应用范围将很有限。因此需要考虑其他的加热方式来提高它的使用范围和使用价值。
(3) 磁控形状记忆合金的某些特性还不够理想,尤其是工作温度范围太窄,在材料理论和应用方面还需进行深入的研究和探讨。
(4) 为了满足SMA 驱动器在实际应用中准确控制和快速响应的要求,需设计一种控制精度好并且驱动频率高的控制方法。
(5) 对于MSMA的传感器特性进行更加系统的研究,为今后MSMA应用于自传感执行器中提供理论指导。
参考文献:
[1] Langer R S, Lendlein A. Biodegradable Shape Memory Polymeric Sutures: U.S. Patent 8,303,625[P]. 2012.
[2] McMahon R E, Ma J, Verkhoturov S V, et al. A Comparative Study of the Cytotoxicity And Corrosion Resistance of Nickel-Titanium And Titanium-Niobium Shape Memory Alloys[J]. Acta Biomaterialia, 2012, 8(7): 2863-2870.
[3] Huang W M, Song C L, Fu Y Q, et al. Shaping Tissue with Shape Memory Materials[J]. Adv Drug Delivery Reviews, 2013, 65(4): 515-535.
[4] Smialek J L, Garg A, Rogers R B, et al. Oxide Scales Formed on NiTi and NiPtTi Shape Memory Alloys[J]. Metallurgical and Materials Transactions A, 2012, 43(7): 2325-2341.
[5] Yu C, Chen K S, Fu S G. Differential Drive Servo Valve Based on MSMA[J]. Applied Mechanics and Materials, 2013, 271: 858-862.
[6] Capella A, Müller S, Otto F. A Constrained Model for MSMA[J]. Advanced Engineering Materials, 2012, 14(8): 594-600.
[7] Belefant-Miller H. Specific Panicle Responses Resulting from MSMA-induced Straighthead Sterility in Rice[J]. Plant Growth Regulation, 2012, 66(3): 255-264.
[8] Zhou M, Wang S, Gao W. Hysteresis Modeling of Magnetic Shape Memory Alloy Actuator Based on Krasnosel'skii-Pokrovskii Model[J]. The Scientific World Journal, 2013, 22(8): 117-121.
[9] 王文洪. NiMnGa合金的结构、磁性和单晶应用功能的研究[D].北京:中国科学院物理研究所,2002.
[10] 米智楠, 钱晋武, 龚振邦,等. 形状记忆合金微型阀的研制[J]. 机床与液压, 2001, 1(1):20-21.
[11] 施晓明, 鄂世举, 曹建波,等. 一种气动微阀的驱动材料特性研究[J]. 液压与气动, 2012(5): 1-5.
[12] Gummin M A, Donakowski W. Shape Memory Alloy Actuator: U.S. Patent 6,762,515[P]. 2004.
[13] Donakowski W J, Gummin M A, Gaines G. SMA actuator safety mechanism: U.S. Patent 6,928,812[P]. 2005.
[14] Yson A P, Messinger R H. Shape Memory Alloy Linear Actuator: U.S. Patent 7,464,548[P]. 2008.
[15] Browne A L, Jones G L. Active Material Based Actuators for Large Displacements and Rotations:U.S. Patent 7,548,010[P]. 2009.
[16] Gummin M A, Donakowski W, Gaines G A. Shape Memory Alloy Actuator: U.S. Patent 7,021,055[P].2006.
[17] Ukpai U I, Bucknor N K. Flow-regulating Valve and Oil Level Control System Using Same: U.S.Patent 7,648,118[P]. 2010.
[18] Kaoru M. Shape Memory Alloy Actuator: Wipo Patent 2011135921[P]. 2011.
[19] Hwang S, Hung S K, Tin C S, et al. Motion Actuator: U.S. Patent 7,309,946[P]. 2007.
[20] Zhou M, Gao W, Tian Y. Hybrid Control Based On Inverse Prandtl-Ishlinskii Model For Magnetic Shape Memory Alloy Actuator[J]. Journal of Central South University, 2013(20): 1214-1220.
[21] Suorsa I, Pagounis E, Ullakko K. Magnetic Shape Memory Actuator performance[J]. Journal of Magnetism and Magnetic Materials, 2004(272):2029-2030.
[22] Suorsa I,Tellinen J, Pagounis E, et al.Applications of Magnetic Shape Memory Actuators[C]. Bremen, Germany: 8th international conference ACTUATOR, 2002:158-161.
[23] Couch R N,Chopra I.Experimental Characterization of NiMnGa Ferromagnetic Shape Memory Alloy Bars Under Variable Loading Conditions[C].Seattle: Proceedings of SPIE,2002(4701):29-39.
[24] Claeyssen F, Lhermet N. Actuators Based on Giant Magnetostrictive materials [C].Hubert Borgmann Actuator 2002, Bremen, Germany: 2002, 148-154.
[25] Ullakko K. Magnetically Controlled Shape Memory Alloys: a New Class of Actuator Materials[J]. Journal of materials Engineering and Performance, 1996, 5(3): 405-409.
[26] 张庆新. 磁控形状记忆合金特性及其执行器应用基础研究[D].沈阳:沈阳工业大学, 2006.
[27] 鲁 军, 王 晨. 磁控形状记忆合金自感知执行器初探[J]. 沈阳理工大学学报, 2008, 27(4):42-45.
[28] 王凤翔, 李文君, 张庆新,等. 差动式磁控形状记忆合金执行器研究[J]. 中国电机工程学报, 2005, 25(18): 27-34.
[29] Lu J, Wang C. A Preliminary Study on Self-sensing Actuator of Magnetically Controlled Shape Memory Alloy[J]. Transactions of Shenyang Ligong University, 2008(4):13-18.
[30] Wang F, Lu J, Xia L. Study on structure and control strategy of MSMA actuators[C]. International Conference on Smart Materials and Nanotechnology in Engineering, 2007(64232I):7-11.
[31] Riccardi L, Ciaccia G, Naso D, et al. Position control for a Magnetic Shape Memory actuator[C]. IFAC International Symposium on Mechatronic Systems, 2010: 478-485.
[32] 张庆新, 王凤翔, 杨 静, 等. 一种新型 MSMA 差动式驱动器的研究[J]. 机器人, 2005, 27(5): 460-463.
猜你喜欢
锻压装备与制造技术(2022年1期)2022-03-24
装备制造技术(2021年1期)2021-05-21
装备制造技术(2020年2期)2020-12-14
科学技术创新(2020年21期)2020-01-06
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
中国特种设备安全(2019年2期)2019-04-22
制造技术与机床(2018年11期)2018-11-23
电气技术(2016年3期)2016-10-14
综合智慧能源(2015年12期)2015-04-24
中国工程咨询(2015年8期)2015-02-16