基于多传感器检测的智能安防巡逻小车
2014-01-14 00:43千承辉綦振伟张兴宇刘鸿石
吉林大学学报(信息科学版) 2014年4期
千承辉,綦振伟,张 楠,张兴宇,刘鸿石
(吉林大学仪器科学与电气工程学院,长春130026)
0 引 言
随着城市规模的不断扩大,安防工作在当今社会发挥着越来越重要的作用。长期以来,安防工作一直沿用传统的人工巡逻体制,巡逻的路线、时间、频率以及密度都不尽合理。所以难免出现人力浪费,事倍功半以及由于巡逻人员责任心不强而造成消极怠工玩忽职守的现象。以至于企业和单位常常投入大量的人力、物力、财力却依然难以起到理想的安防效果[1]。
智能安防巡逻小车集多种传感器于一体,能实时监测巡逻地的各项环境指标参数,并可以在紧急情况,如:火灾、外来人员入侵等事件突发时进行自动报警。巡逻车通过摄像头进行循迹和避障,使用光强传感器采集光强并为其提供照明,通过无线收发模块传输视频,并通过上位机实现远程检测控制。巡逻车还可以实现智能充电。智能安防巡逻车的自主巡逻和远程监控具有灵活便利,稳定性强等优点,能在人少值守的情况下实现全方位监控巡逻地以保障安全,节约了人力物力并提高了巡逻效率[2]。
智能安防巡逻车的研发克服了传统巡逻体制的不足,是一种能自主巡逻、采集信息、智能充电、精确定位的先进设备。巡逻车采用先进的控制系统和算法,不仅能出色完成巡逻任务,而且对智能化控制系统的研究更进一层,对汽车工业也有很大的推广作用[3]。
1 系统设计
智能安防巡逻小车采用飞思卡尔主控芯片K60与外加单片机MSP430相互协调控制整个系统稳定运行。其中主控制器主要控制小车的正常行驶、速度调节和无线传输等功能,辅助控制器主要执行烟雾报警、温度检测、光强检测、电量管理和语音提示等多种传感功能。
在巡逻时,小车通过摄像头检测前方路况,在空旷路面巡逻时,小车行驶较快,一旦进入易发事故地点,小车将放慢速度仔细巡逻。其多种传感器可以感知环境变化,一旦检测到烟雾和火焰,小车将发出报警信号。小车通过超声波实时进行动态监测,当外来人员入侵时,小车会发出语音警告并向终端报警。一旦小车的电量低于设定值,小车便会停止巡逻自动返回出发地点等待充电。此外,为克服传统GPS定位的不精准性,设计了有效的定位算法对小车进行实时定位,这样一旦有情况发生,便能及时赶到事发地点,提高巡逻效率。
2 巡逻车的硬件设计
巡逻车具有完善的传感器系统[4]、运动控制算法、实时通信的能力以及可靠的执行机构[5]。系统整体结构图如图1所示。
首先小车装有温度传感器、烟雾传感器、光强传感器和超声波等多种传感器,实时采集环境信息。
1)采用热敏电阻加A/D转换的方式进行温度监测,热敏电阻具有灵敏可靠的优点[6],A/D转换器兼有抑制串模干扰能力强、分辨力高、线性度好、成本低等优点[7],解决了DS18B20精度不高测温范围较低的问题。
2)烟雾传感器利用火灾发生初期,燃料急剧氧化释放的气溶胶粒子及烟雾进入检测电离室后,吸附并中和正负离子,使电离电流急剧减少,改变了离子电流平衡状态,在中间电极产生一个与被测烟雾浓度呈正比的电压增量,通过分析电压增量的变化进行火灾的预警[8]。
3)摄像头采集图像受光强影响,采用光强传感器BH1750采集光强并为其提供不同程度的照明。该芯片具有I2C总线接口、对应大范围输入光、功率低、内置A/D转换器和无需外接部件等优点[9]。
4)对入侵人员的检测依靠超声波传感器实现,超声波测距是一种有效的非接触式测距方法,其原理是超声波传感器可以发生一定频率的超声波并借助空气媒质传播,到达测量目标或障碍物后反射回来,通过计算传输时间得出距离[10]。将其与360°旋转舵机连接实现对四周的监测,超声波模块将在每个方位上连续扫描,将超声波扫描到的前一周期的位置信息与后一周期的位置信息相比较,实现对动态物体的检测。根据舵机转角确定目标位置信息,CPU控制摄像头转向对目标进行监控并发出语音提示,成功地解决了热释电传感器识别距离短和灵敏度低的问题[11]。
其次,智能安防巡逻小车通过摄像头循迹完成正常行驶,通过无线通讯实现远程监控[12]。采用摄像头进行路径识别,其工作原理是用摄像头提取小车前方道路的图像,获得小车前方的路况信息[13](见图2),再将采集到的图像通过软件进行二值化[14](摄像头采集灰度图像的阀值大于预设值时将其置1,相反则置0)(见图3)。根据二值化图像采用PID(Proportional Integral Differential)算法对舵机和电机控制[15],最终使小车沿着预定的道路前进[16]。采用摄像头提高了轨道信息采集速度,解决了高速状态下红外对管循迹稳定性差的问题。

图1 系统整体结构图Fig.1 The structure of the system
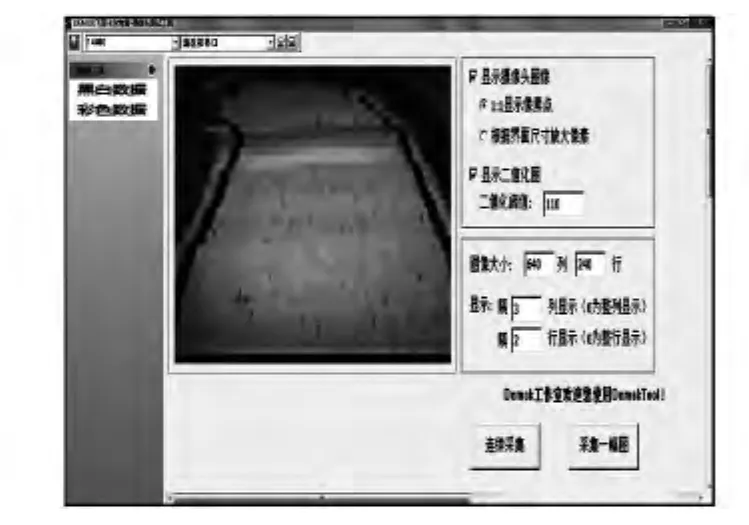
图2 路况信息图Fig.2 Traffic information graph

图3 二值化图像Fig.3 The two value image
摄像头将采集到的图像通过无线模块传送给在Windows系统平台下搭建的上位机,进而实现对巡逻车的远程控制[17],上位机界面如图4所示。在自主巡逻的基础上,可以在既定路线对小车的速度进行设定,在走廊等空旷安全的路面巡逻时,小车的行驶设定为快速,以节约时间、提高巡逻效率,一旦进入巡逻地点,小车将放慢巡逻速度,以全面细致巡逻,保障巡逻质量。
再次,巡逻车在工作中一旦检测到突发情况会发生报警,需要实时了解小车的具体位置,以便及时采取措施,保证巡逻地点的安全。通过测速码盘将速度信息经过计算转换成距离信息,并计算与初始点的距离,通过Windows平台呈现出当前位置,并在每个巡逻周期重新初始化定位原点,避免因多次巡逻的误差累计造成的定位误差较高的问题。
最后,智能安防巡逻车通过辅助控制器进行AD采集转换实现对小车电量的检测,当小车电池的电量低于预定值时,小车将停止巡逻,自动返回到出发位置,等待充电。
智能安防巡逻小车完善的传感功能能全面检测巡逻地点的各项环境指标,在第一时间检测到火灾、盗窃等潜在的威胁安全的因素。智能的循迹避障、电量管理、速度调节和实时定位等功能让小车可以畅通无阻地进行巡逻,保障巡逻效率,大大节省了人力和物力,具备很强的开发潜力和市场竞争力。

图4 上位机软件界面Fig.4 PC software interface
3 巡逻车的软件设计
该系统选用K60与MSP430单片机进行数据处理,采用C语言对软件部分进行开发,使软件具有可读性好,可移植性好等特点[18]。整个系统的程序采用子程序调用的模块化设计方式,各个子程序块设计相对独立,便于后期的修改和调整。程序的流程如图5所示。

图5 程序流程图Fig.5 Program flow chart
4 测试与分析
由于定位算法是在巡逻车行驶距离的基础上完成的,为了保证定位准确,对巡逻车真正行使距离X和处理器测得数据Y进行多次测试,测试结果如表1所示。

表1 行驶距离与测量距离测试结果Tab.1 The travel distance and distance measurement test
同时又测试了超声波检测入侵人员的准确程度,其中A表示有物体靠近,B表示有物体远离,C表示有物体不动,测试结果如表2所示。

表2 超声波检测入侵人员测试结果Tab.2 Test results of ultrasonic intrusion detection
巡逻车能否在光线较暗的地方行驶取决照明系统,于是对照明系统工作的稳定性进行测试,测试结果如表3所示。

表3 照明系统稳定性测试结果Tab.3 Lighting system stability test
误差分析:1)行驶距离是通过光电码盘测量的,其原理是记录脉冲的个数最后转化为距离,因为小车行驶与计数不能做到完全同步,由此会引发±1误差,从测试结果可看出,最大相对误差为3%,随着行驶距离的不断增大,其相对误差在不断减小,因此分析在实际巡逻过程中,行驶距离和测量距离差距不大;2)小车在行驶过程中晃动会影响计数的准确性,对实验结果影响较大,但从测试结果可以看出,最终测试误差不大,可对行驶距离数据进行处理,完成对巡逻车的定位。超声波测距的原理与此类似,由测试结果可以看出,超声波能正确检测出是否有入侵人员,在巡逻过程中基本不会产生错误报警,从而保障了巡逻的有效性。
5 结语
智能安防巡逻小车完善的传感功能、精准的运动控制算法、实时通信的能力以及可靠的执行机构无一不显示了其广阔的应用前景。其自主巡逻功能配合安防人员共同完成巡逻工作,很大程度上减轻了人工强度和物力投资,有效地避免由于人为因素造成的安全疏忽和经济损失。另一方面,智能安防巡逻小车的多种传感检测功能,可以实时检测被巡逻场所的各项环境参数,从而及时全面地排除了多种隐患,有力地保障了被巡逻场所能时刻处于良好的安全状态。智能安防巡逻小车作为新时期人类运用科技,解决生活问题的创新产物,还具有灵活高效、方便实用、易于普及推广的优点,可广泛应用于社区、学校等多种场所,有着良好的应用前景和发展空间。
[1]陈志华,谢存禧,曾怀德.巡逻机器人的研究现状与应用前景[J].机械工程技术,2003,32(6):19-21.CHEN Zhihua,XIE Cunxi,ZENG Huaide.Patrol Robot Research Status and Application Prospect [J].Mechanical Engineering Technology,2003,32(6):19-21.
[2]姜悦悦,王宏华.基于多传感器信息融合的智能安保巡逻小车[J].电气技术与自动化,2012,41(6):203-205.JIANG Yueyue,WANG Honghua.Intelligent Security Based on Multi Sensor Information Fusion Patrol Car[J].Electric Technology and Automation,2012,41(6):203-205.
[3]应翔,雷鹏飞,高坎贷,等.智能巡逻车的系统分析与实现[J].福建电脑,2010,26(3):11-16.YING Xiang,LEI Pengfei,GAO Kandai,et al.Analysis and Implementation of the System of Intelligent Patrol Car[J].Fujian Computer,2012(1):203-205.
[4]蔡自兴.机器人学的发展趋势和发展战略[J].机器人技术与应用,2001(4):188-216.CAI Zixing.Robotics Trends and Development Strategy[J].Robot Technique and Application,2001(4):188-216.
[5]祝宏,曾祥进.多传感器信息融合研究综述[J].计算机与数字工程,2007(12):46-48.ZHU Hong,ZENG Xiangjin.Multi-Sensor Information Fusion Research [J].Computer and Digital Engineering,2007(12):46-48.
[6]胡润锋.NTC热敏电阻温度传感器[J].技术与应用,2001(7):26-29.HU Runfeng.NTC Thermistor Temperature Sensor[J].Technology and Applications,2001(7):26-29.
[7]马净,李晓光,宁伟.几种常用温度传感器的原理及发展[J].中国仪器仪表,2004(6):1,46.MA Jing,LI Xiaoguang,NING Wei.The Principle of Some Temperature Transducer in Common Use and Development[J].Several Commonly Used Temperature Sensor China Instrumentation,2004(6):1,46.
[8]陈章其,吴冲若.火灾传感器[J].电子器件,1995(3):55-58.CHEN Zhangqi,WU Chongruo.Fire Sensor[J].Electronics,1995(3):55-58.
[9]何安科.基于STM32与光强传感器BH1750的无线路灯控制系统[J].企业科技与发展,2011(20):15-17.HE Anke.Based on the STM32 and Light Intensity Sensor BH1750 Wireless Street Lamp Control System[J].Development of Science and Technology Enterprises,2011(20):15-17.
[10]沙爱军.基于单片机的超声波测距系统的研究与设计[J].电子科技,2009(11):57-61.SHA Aijun.Research and Design of Ultrasonic Ranging System Based on Single Chip Microcomputer[J].Electronic Technology,2009(11):57-61.
[11]吴传贵,刘兴钊,张万里,等.热释电薄膜在红外探测器中的应用[J].红外,2004(3):5-10.WU Chuangui,LIU Xingzhao,ZHANG Wanli,et al.Application of Pyroelectric Thin Films in Infrared Detector [J].Infrared,2004(3):5-10.
[12]王胜源,张洪武,赵凯,等.无线收发模块在多机通信中的设计与实现[J].吉林大学学报:理学版,2006,44(3):470-472.WANG Shengyuan,ZHANG Hongwu,ZHAO Kai,et al.Design and Realization of Wireless Transceiver Module in Communication of Many Machines[J].Journal of Jilin University:Science Edition,2006,44(3):470-472.
[13]孙宝法,张晓玲.用摄像头循迹的智能车的硬件设计系统[J].Value Engineering,2013(30):201-202.SUN Baofa,ZHANG Xiaoling.Use Camera Tracking the Hardware Design of a Smart Car System [J].Value Engineering,2013(30):201-202.
[14]李旭东,廖中浩,孟娇.基于CMOS摄像头的智能车控制系统设计及实现[J].吉林大学学报:信息科学版,2013,31(4):414-418.LI Xudong,LIAO Zhonghao,MENG Jiao.Intelligent Vehicle Control System Design Realization Based on CMOS Camera[J].Journal of Jilin University:Information Science Edition,2013,31(4):414-418.
[15]韵卓,陈龙冬,刘富.基于飞思卡尔单片机的智能电动小车设计[J].吉林大学学报:信息科学版,2013,31(3):272-278.YUN Zhuo,CHEN Longdong,LIU Fu.Design of Intelligent Electric Vehicle Based on Freescale Microcontroller[J].Journal of Jilin University:Information Science Edition,2013,31(3):272-278.
[16]李兴泽,王福平.基于CCD摄像头的小区自动循迹停车系统[J].计算机应用,2013,33(S1):321-323.LI Xingze,WANG Fuping.Automatic Tracking the Parking System Cell Based on CCD Camera [J].Computer Application,2013,33(S1):321-323.
[17]蒋学润,李中华,毛宗源.基于VB的数据采集智能模块与上位机串行通信的实现[J].自动化与仪表,2003(6):61-63.JIANG Xuerun,LI Zhonghua,MAO Zongyuan.Realization of Serial Communication between Intelligent Module and Host Computer in VB Environment[J].Automation and Instrumentation,2003(6):61-63.
[18]詹新生,张江伟.基于AT89S51的无线数据采集系统设计[J].实验室研究与探索,2011,30(4):199-202.ZHAN Xinsheng,ZHANG Jiangwei.Design of Wireless Data Acquisition System Based on AT89S51 [J].Research and Exploration in Laboratory,2011,30(4):199-202.
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
文苑(2018年22期)2018-11-19
电子制作(2018年17期)2018-09-28
电子制作(2018年8期)2018-06-26
军事文摘·科学少年(2016年7期)2016-09-20
电子制作(2016年21期)2016-05-17
水利科技与经济(2016年4期)2016-04-22