
低辐射车辆检查装置图像处理关键技术研究
2014-02-16 08:33丰树强窦玉玲张国光
核技术 2014年6期
丰树强 赵 潇 窦玉玲 张国光
(中国原子能科学研究院 北京 102413)
低辐射车辆检查装置图像处理关键技术研究
丰树强 赵 潇 窦玉玲 张国光
(中国原子能科学研究院 北京 102413)
低辐射成像技术应用于车辆检查存在着诸多技术难点,如归一化、对数变换、动态范围变换、探测器等工作的不稳定所引起的干扰等问题。本文结合实际应用,对数据处理过程中的若干关键技术做了分析并提出了相应的解决方案。针对由放射源位置变动造成的计数涨落,采用了动态本底技术。经现场测试,取得了很好的效果。
低辐射,车辆检查,辐射成像,图像处理,绿色通道
在核技术领域中,利用射线成像原理实现对人员、行李、车辆等进行扫描的产品应用很广。近年来,随着国家出台的高速公路绿色通道车辆免收通行费的政策全面落实,几乎所有的高速公路收费站点都对以运送新鲜蔬菜、水果、鲜类、蛋类等为主的车辆开辟了专门的绿色通道,使绿通车辆的通行效率得以提高。据估算,2012年全国各收费站点日均通过的绿通车辆达到300辆,在一些东部省份如山东、江苏,甚至达到800辆。然而,一些运送非绿色通道许可货物的车辆也伪装成绿色通道车辆通行,偷逃通行费。为此,各主要高速公路运营公司都采取了多种措施进行打击,但效果有限。主要原因是绿通车辆多以中大型货车为主,短时间内采取人工方式很难进行有效检查。现状是,检查人员只能对位于货箱门口处的货物进行简单检查,进而根据经验判断是否合格。违法人员也正是抓住这一点,将夹带货物藏于车厢内部,逃避通行费。据统计,常规检查方法的平均检查时间为5-10 min,且收效甚微,效率低下。
为了有效打击高速公路假冒绿通车辆的违法行为,确保政策得到精确执行,保障绿通车辆与高速公路公司的正常利益,高速公路急需一种安全、高效、稳定的检查手段,用于对绿通车辆进行在线流水式检查。辐射成像技术很快得到重视,成为契合这方面应用的、有前景的技术手段。
1 物理模型
绿色通道应用提出之前,多数用于车辆检查的辐射成像技术均采用高活度(如高于200×1010Bq)放射源或者高产额加速器,接收端则采用气体阵列探测器,此外需要建造笨重的屏蔽体以及车辆牵引装置等,检查前司乘人员需下车。
由于此类设备造价不菲、检测效率低、安装条件苛刻,特别是日本福岛核电站事故之后,公众对放射性的关注与质疑较为强烈,高辐射的检查设备应用受阻。此外,高活度的放射源在使用中一旦发生联锁机构卡住或屏蔽壳无法归位的情况,容易造成辐射事故,且常规手段难以维修。从需求角度看,此类设备大多安装在车流密集场所,并且使用频率很高,因此对安全性与稳定性要求都很高。因此,小型化、低辐射、低成本、高可靠性是发展趋势。
实际应用场合对检查系统的主要指标需求有:最大通行宽度为3 m、最大通行高度为4.8 m、平均单次扫描时间小于30 s、司乘人员单次扫描吸收剂量低于0.1 μSv。
分析表明采用低活度的放射源是关键。低活度意味着屏蔽体的体积与重量减小,被照物体的吸收剂量降低,成本降低,安全性提高;但源强、探测器体积、分辨率、数据采集频率之间是相互关联的。考虑到应用环境、半衰期以及设备的一般使用周期,采用活度低于2.96×1010Bq的Co-60与NaI晶体探测器。MCNP计算表明,当晶体直径大于ø20 mm、长度大于50 mm时,探测器计数率可以满足图像采集的要求。为提升成像质量,可适当加长探测器。电子学部分负责对信号积分与成型,并将信号调制为方波后经差分电路送入计数采集卡,后者统计单位时间内信号数量作为成像系统的原始数据。
图1为依照国标《辐射型集装箱检查系统》GB19211-2003要求对系统进行测试的装置,实验主要包括三部分:穿透力测试、反差灵敏度测试、丝分辨力测试。
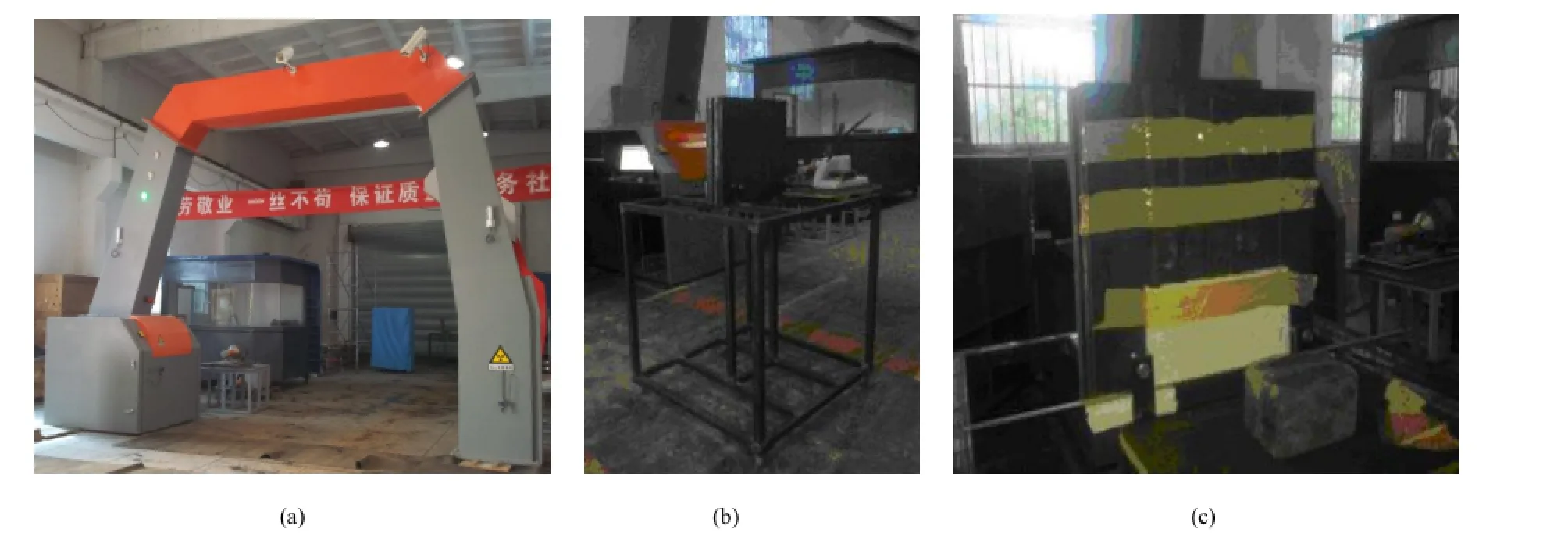
图1 实验设备(a)、实验台架(b)和测试用钢板与钢条(c)Fig.1 Experimental facility (a), experimental table (b) and steel plate and bar (c).
实验所采用的钢板吸收体规格为500 mm× 500mm×150 mm,台架的运动速度为 0.1 m·s-1,计数采集卡的统计间隔为50 ms。通过实验得到系统的主要参数有:最大穿透力为185 mm、反差灵敏度为1.96%、丝分辨力为10%,示意图见图2。

图2 最大穿透力(a)、反差灵敏度(b)和丝分辨力(c)Fig.2 Maximum penetration power (a), contrast sensitivity (b) and silk resolution (c).
由于实际使用时被测车辆多为大型货车,考虑到车辆与设备的安全性,需限制车辆的最大通过速度为15 km·h-1。在此条件下,考虑到探测器的尺寸,为保证成像后的长宽比在合理的范围内,数据采集频率应设定在10-50 ms之间。经过实验,此条件下探测器单位时间内的全亮度计数(开源,无遮挡物)的动态范围已经达到210以上,可以满足成像系统的要求。各路探测器全亮度计数差异较大的主要原因是探测器与源的距离差异较大。同时,理论计算表明,全亮度计数下部分离源较近的探测器存在一定程度的堆积,最高堆积可达30%以上,理论上这会影响到最终成像效果,但实际使用中影响有限,这主要是因为堆积只在被测车辆很空时发生,此时该局部图像的辨识度较好,不影响检查人员的判别。
2 辐射成像
成像系统接收计数采集卡的数据,经归一化、对数变换、动态范围变换、灰度变换等处理后显示出扫描图像。成像系统的完整工作流程如图3所示。
根据车型的不同,实验中采用100-200路探测器进行测试。实际使用中最长的被测车辆可达20m,当车辆以最低限速5 km·h-1通过时,采集的图像数据接近1 000列。
由于各种蔬菜的含水量不同,取参考值0.4,计算表明Co-60源的穿透极限为1.5 m,实验中货车分别装载1.0 m厚的土豆与1.5 m厚的白菜进行了扫描实验,结果如图4所示。
从扫描得到的计数数据可知,当车辆装载白菜部分的车身通过扫描线时,探测器计数已经接近本底计数。因此,对于低辐射成像,为了提高图像的反差灵敏度,同时消除由距离差异引起的灰度畸变,数据采集前的本底计数获取与全亮度计数获取非常重要,这是对各路探测器准确标定与数据归一化计算的基础。
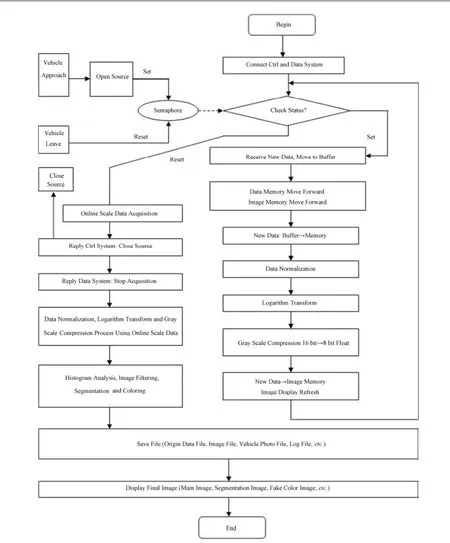
图3 成像系统工作流程Fig.3 Imaging system workflow.

图4 土豆与白菜扫描实验Fig.4 Potatoes and Chinese cabbages scan experiment.
归一化的目的是消除由探测器距离差异以及性能差异造成的计数数据与图像灰度之间不能形成一致的转换标准的问题。常用的做法是选取某一路探测器为基准,采用线性插值方法,对其余探测器的数据进行转换,使所有数据形成统一的灰度基准。实际应用中,由于各路探测器或相应的电子学线路均有一定的损坏概率,如果将基准探测器硬编码为某一路,则该路探测器的稳定性对系统的整体稳定性影响重大。为了降低这种耦合度,我们引入方差分析的方法。
经验表明,单次测量时某几路计数出问题的情况经常发生,但大量探测器通道同时发生故障的概率则相当小。基于这个思路,假设某一路探测器的全亮度记数是准确的,以该计数作为理论值,由于各路探测器与放射源的距离已知,可通过物理计算将该路探测器计数分别映射到其它每一路上,这样便得到了各组理论值(CT)与实测值(CE),进而有:
由式(1)求出方差,此方差作为评价该路探测器通道性能指标的依据。照此方法可以求出每一路的方差。这其中方差最小的那一路就被定为基准数据,其余各路都以该路为基准进行归一化。对于单次检测中出现故障的探测通道,其计数必然偏离群体,方差很大,因此不会被选为基准。这样系统的可靠性大大增加。实测表明,只要探测器或电子学不出现大面积的故障,成像系统都可以正常运行。
实验中注意到,放射源每次开启后的位置存在微小的差异,导致射线经过准直器后,在探测器上出现计数波动,影响成像的稳定性。为了消除放射源每次开启时的位置差异对最终成像质量的影响,采用“动态本底技术”对实时成像时的数据归一化与采集结束后的数据归一化用不同的本底与全亮度数据进行处理,分为预先测量数据与实时测量数据。系统安装调试后需预先进行一次本底计数与全亮度计数测量,此预先测量数据只用作实时成像过程中的数据归一化。一般情况下,对于运动图像显示,只要不出现明显的、连续的模糊情况,就不对预先测量的本底和全亮度数据进行重新测量。实际采集时,当车辆完全通过检测面后,成像系统可利用放射源还没有被关闭的间隙,进行实时全亮度的数据测量。当采集结束后,所有图像数据都已经获取,此时利用该实时测量数据对所有图像数据重新进行归一化运算,得到最终图像。由于实时测量数据与车辆检测过程中的图像数据是放射源处于同一位置下的检测数据,因此重新进行归一化运算能有效消除放射源位置差异的影响。
穿透率与穿透厚度之间存在如下指数关系:

式中,μ为衰减系数;x为穿透厚度;I0为穿透前计数;I为穿透后计数。
因此,归一化后的数据矩阵需做相应的对数变换。由对数函数曲线,对于任一点x0、y0=f(x0),对于固定的增量Δx,有:

当x0较小时,Δy较大;随着x0增大,Δy逐渐减小。而x0较大的点对应被测物较薄的部分,即较容易穿透的区域;x0较小的点对应被测物较厚的部分,即不容易穿透的区域。结合实际情况,先做如下的线性变换:假设矩阵数据的最小值为Xmin,则对每一个矩阵数据X做运算:X′=X-Xmin+2,即将对数变换的自变量区域拉近到靠近过零点(2,X)的区段,这样对数变换后的矩阵有利于被测物较厚区域的图像显示。
计数采集卡获取的计数是以双字节格式保存的,因此理论上最高可到16位灰度级;而操作系统只支持8位灰度级的图像显示[1]。直接进行线性动态范围压缩,必然造成细节丢失。因此考虑采用浮点数矩阵存储压缩后的数据,即作216(int)→256 (float)的转换,该浮点数矩阵作为用户后期图像处理的数据源,对用户所做的灰度做如下变换:
256(float)(TL-TH) →256(byte)
式中,TL、TH为用户选取的阈值下限和上限。这使得图像细节在用户的灰度变换中仍得到保留。
为方便检查人员的后期处理,在成像系统中实现了常用的图像处理功能,有几何变换(反色、镜像、放大、灰度拉伸)[2]、平滑与锐化(中值、高斯、梯度、拉普拉斯)、频域滤波(傅立叶、高通)、分割与伪彩(Roberts、Prewitt、Sobel、Kirsch、Rainbow)[3]等。
3 系统应用
成像系统基于Windows XP与Visual Studio 2005环境开发,采用TCP协议作为各子系统通讯与数据收发的传输层协议[4]。考虑到实际应用中,图像扫描一般可在20 s内完成,而检查人员的后期分析、处理、研判所需时间不固定。因此,为提升系统的吞吐量,消除因检查违法车辆所造成的后续车辆积压,在项目设计时我们将成像系统的实时扫描模块与图像处理模块分离;二者可以独立工作,实时扫描模块将扫描后的数据文档发送到图像处理模块,后者则以任务队列的形式接收缓冲多个数据文档。检查人员可以挂起有疑问的数据文档,进行后续文档的分析处理。
2012年,该系统成功应用于山东高速某收费站的绿色通道车辆检查。系统投入使用后,日均扫描车辆超过500辆,可对通过该收费站的所有绿色通道车辆进行在线式检查。同时,检查人员的工作效率相比传统方式提高了5倍以上,人员数量缩减为1-2人,检查的准确率有了大幅度提高。图5为系统工作现场实物图,图6为绿色通道车辆扫描图像,其中图6(a)为车头非避让模式下的正常绿通车辆扫描图像,图6(b)为车头避让模式下的违法夹带车辆扫描图像。可以看出,对于货箱中大面积的违法夹带行为,扫描后的图像能比较清晰地显示出来。

图5 设备工作现场Fig.5 Equipment working site.
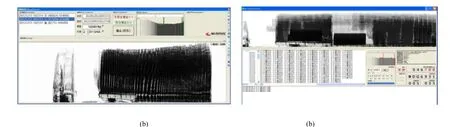
图6 绿色通道车辆扫描图像(a) 图像处理,(b) 文档浏览Fig.6 Green channel vehicle inspection image. (a) Image processing, (b) Record reviewing
正常运行时系统只工作于车头避让模式,放射源在车头通过后才会打开,检查过程中司乘人员无需下车,可直接驾车低速通过检查设备。即使货箱中藏有人员,被直接照射后人员的单次吸收剂量也在本底水平,仅相当于乘坐飞机在高空5 min的照射剂量。
4 结语
公众对辐射源安全性的关注以及客观环境的使用限制促使辐射装备逐步向低辐射、小型化、实用化方向发展。绿色通道车辆检查的应用需求是近几年才被提出来的,并随着政策的落实而逐渐明确。不同于以往的车辆检查,针对绿色通道车辆的检查有特殊的技术指标与应用需求。本项目对低辐射条件下的成像关键技术做了分析与讨论,并结合实际应用中的若干问题提出了相应的解决方案。经现场测试,取得了较好的效果。由于大型绿色通道车辆的宽度可达2 m以上,满载货物时,现有的放射源难以穿透,因此,研发高能量低产额的加速器设备替代现有的低剂量Co-60源是下一步的工作重点。
1 Castleman K R. Digital image processing[M]. Beijing: Prentice-Hall International, 1998
2 冈萨雷斯. 数字图像处理[M]. 第二版. 北京: 电子工业出版社, 2003
Gonzalez R C. Digital image processing[M]. 2ndEd. Beijing: Publishing House of Electronics Industry, 2003
3 何斌, 马天予, 王运坚, 等. Visual C++数字图像处理[M]. 第二版. 北京: 人民邮电出版社, 2002
HE Bin, MA Tianyu, WANG Yunjian, et al. Visual C++ digital image processing[M]. 2ndEd. Beijing: Posts & Telecom Press, 2002
4 叶树华. 网络编程实用教程[M]. 第二版. 北京: 人民邮电出版社, 2010
YE Shuhua. Network application programming[M]. 2ndEd. Beijing: Posts & Telecom Press, 2010
CLCTL99
Critical technology research on image processing for low radiation vehicle inspection equipment
FENG Shuqiang ZHAO Xiao DOU Yuling ZHANG Guoguang
(China Institute of Atomic Energy, Beijing 102413, China)
Background:Normal green channel vehicle inspection methods have many flaws, such as low efficiency and long time expense. The accuracy depends on the experience of inspector and it can not meet the online inspection. Purpose: The aim is to develop a new method which can help the inspector to promote the vehicle inspection speed and accuracy. Methods: Using real time image processing and control system, a new imaging system was developed. Results: The actual test shows that the inspection time can be reduced to less than one minute and the inspectors can also be reduced to one or two persons. Also the inspection accuracy is greatly improved. Conclusion: The imaging system achieves good effect through actual tests.
Low radiation, Vehicle inspection, Radiation imaging, Image processing, Green channel
TL99
10.11889/j.0253-3219.2014.hjs.37.060401
丰树强,男,1978年出生,2007年于中国原子能科学研究院获硕士学位,核技术应用
窦玉玲,E-mail: carol707@163.com
2013-12-19,
2014-02-21
猜你喜欢
核安全(2022年3期)2022-06-29
核安全(2022年3期)2022-06-29
核安全(2021年6期)2021-12-31
今日农业(2020年22期)2020-12-14
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
小学科学(2019年12期)2019-01-06
中国交通信息化(2018年3期)2018-06-13
中国交通信息化(2016年11期)2016-06-06
中国卫生(2015年5期)2015-11-08
