
微小型救援机器人机械手设计
2014-03-26 07:32杨立松柳虹亮谭海东
长春工业大学学报 2014年2期
杨立松, 朱 丽, 柳虹亮, 谭海东
(1.长春工业大学工程训练中心,吉林长春 130012;2.吉林农业大学信息化教学与管理中心,吉林长春 130118)
0 引 言
微小型救援机器人凭借其结构紧凑、应用范围广、适应能力强等诸多优点,在探测、反恐防爆以及救援等领域都有广泛应用。在具体的工作环境下,机械手的结构设计一定程度上决定了任务的成败,所以,机械手的设计显得更为重要。对于微小型救援机器人,其工作特点是要求要有较高的成功率,所以,设计一种能够适应救援环境的机械手已显得尤为必要[1]。
微小型救援机器人的机械手是微小型救援机器人非常重要的组成部分。通过设计将一个或者几个机械手安装在可以移动的平台上,这样的设计结构使设计的机械手在几乎拥有了无限大的工作空间的同时也获得了高度的运动冗余性。该机械手具有的移动和操作功能也使它明显优于传统的机械手。
为了提高机械手的综合适应能力,首先,通过对现有得到广泛应用的微小型救援机器人的工作特点进行分析,设计了一种独特的机械手,此机械手是以六自由度手臂为依托,拟用电机驱动齿轮传动,这样即能够保证机械手的结构紧凑,又能保证在救援环境复杂的情况下仍具有较高的传动精度。其次,由于微小型救援机器人的工作环境具有明显的特殊性,为了保证手臂的刚度、强度和明显减轻手臂的整体重量,选用航空铝6061作为外部壳体支撑部件的材料。再次,为保证传动精度和效率,通过比较最终选择45#钢作为齿轮材料[2],并采用齿轮和连杆结合的机械手设计方案。最后,对机器人整体做了三维实体建模,为机械手的仿真分析提供必需的样机模型。
经过实际应用和测试,机械手的结构紧凑轻便,能够很好地达到设计要求。
1 微小型救援机器人机械手的工作原理分析
1.1 机械手的自由度形式分析
为了能够满足救援任务,物体姿态的变化和位置变化都要求必须被实现。为完成此项任务要求,设计的机器人机械手的关节工作空间内的自由度形式示意图如图1所示。

图1 各个关节在空间内的自由度形式示意图
为满足能够在加大工作空间工作的要求,基座设计有一个绕z轴方向的自由度1,用来调节机械手到达不同抓取位置与释放位置的方向[3];为了满足机械手末端能够到达远近不同的位置要求,设计了大臂、小臂3个自由度2,3和4;因为救援物体的存在姿态可能会不同,设计增加了一个腕部旋转自由度5;由于要完成抓取与释放动作,设计了末端夹持器的自由度6。
根据上述自由度形式分析,设计的微小型救援机器人的操作基本结构主要由5部分构成,包括末端机械手、基座、大臂、小臂以及手腕。大臂与基座间的仰俯运动、基座自身的旋转运动、大臂与小臂的仰俯运动、腕部与小臂之间的仰俯运动,还有腕部的旋转运动,末端机械手末端夹持器的夹取运动是具体的关节运动形式。将救援机器手设计为6自由度的形式,这种形式具有明显的操作灵活、工作空间广等优点,能够满足微小型救援机器人特殊工作环境的需要。
1.2 机械手的工作空间分析
为解决大多数救援机器人工作空间受限和控制精度不高的问题,依据实际需要,文中微小型救援机器人机械手的整体尺寸控制在长×宽×高为280 mm×280 mm×400 mm以内,机械手最大有效工作长度约340 mm,如图2所示。

图2 微小型救援机器人机械手的关节工作空间示意图
经过对工作空间的分析,设计了合适的结构及尺寸,为实际制造奠定了基础。
2 机械手的部件设计及传动方式的选择
2.1 机械手的基本组成
基座、大臂、小臂、腕部和末端执行器组成是机械手的重要组成部分,其中,末端执行器由一对微型步进电动机、一对钳体、四根驱动连杆、两个垫片和一个法兰盘加之机械手壳体一起组成。
为了满足对微小型救援机器人动作的精准快速的控制,文中设计的末端执行器如图3所示。
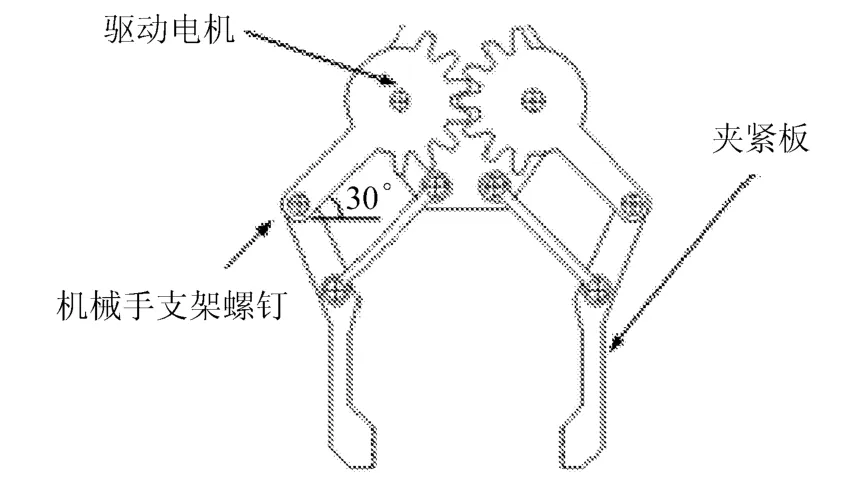
图3 末端执行器
2.2 微小型救援机械手的关节设计
机械臂的设计是在参考同类型机械执行器的基础上进行的,力求做到体积小、质量轻、刚性好、负载力满足要求的特点。设计的各环节部件经过分析计算及强度校核,其中之一的二维图如图4所示。

图4 微小型救援机器人机械手关节二维图
2.3 机械手的驱动力求解
为了选择合适的驱动电机,对机械手的各个部分进行类似末端执行器的受力分析,其受力简图分析如图5所示。

图5 机械手末端加持器受力分析图
首先,通过计算确定机械手末端夹持器对被夹持物体的作用力N,设定夹紧板转动30°,计算两夹紧板所能够承受的重量。此时,机械手的中部两板没有与被夹持物体接触,考虑到重心在中部,假设被夹持物体的重力作用集中在端点[4]。查表得摩擦因数μ通常取0.5,根据作用力的平衡,由图5得:

为保证绝对安全将重物设为10 N(设重力加速度g=10 m/s2),机械手的受力分析简图见图5,夹紧板对齿轮啮合处作用力为F1,F2,其方向通过O点并与夹紧板成60°,且L1=45 mm,L2=32 mm,L3=80 mm。

在O1点力矩和为零∑MO1=0,即:

由式(1)和式(2)得出机械手的驱动力

考虑到杠杆传动的效率以及齿轮传动的效率,取机构传动的效率η为0.84,故此机构的实际驱动力为:

2.4 微小型救援机器人机械手驱动方式及减速机构的设计
对位置精度要求较高以及负载力矩较大是微小型救援机器人的显著特点,所以机器人手臂关节部位均选用步进电机进行驱动,步进电动机电机旋转的角度正比于脉冲数,在停转时具有最大的转矩,并且具有优秀的启停和反转响应。机器人手臂所采用的步进电机提供自带的减速装置,通过测试可满足机器人手臂运转所需的转矩和转速,可缩减成本,且易于安装和保养。
2.5 微小型救援机器人机械手的传动方式及材料选择
综合考虑手臂的结构形式、外部结构尺寸以及对手臂刚度、强度、灵活度的要求,选择齿轮传动作为传动方式,这样既保证了外部结构尺寸,又保证了传动的效率,增加了传动的可靠性,并且在手臂上安装力矩限制机构,能够实现对过载力自动保护,提高了系统的安全性。
在综合考虑机器人手臂的传动方式和结构形式,同时对可能合适的材料进行分析以后,选用了航空铝6061作为外部壳体支撑和部件的材料[5],选用此材料既能满足手臂的强度和刚度要求,又能减轻手臂的整体重量。通过比较最终选择45#钢作为齿轮材料,其它内部零件的材料也选择45#钢[6]。
3 微小型救援机器人机械手三维实体建模
在机械手机构设计时,不但要合理地分配尺寸,保证尺寸的协调和装配的顺利进行,还要保证模块化的关节运动不受干涉。同时,注意其造型是否美观,整体综合效果是否满足要求。通过对这些问题的分析总结,三维造型软件Catia就可以很好地解决这些问题[7]。
利用工程制图软件Catia按照1∶1的比例建立三维实体建模。三维实体模型如图6所示。
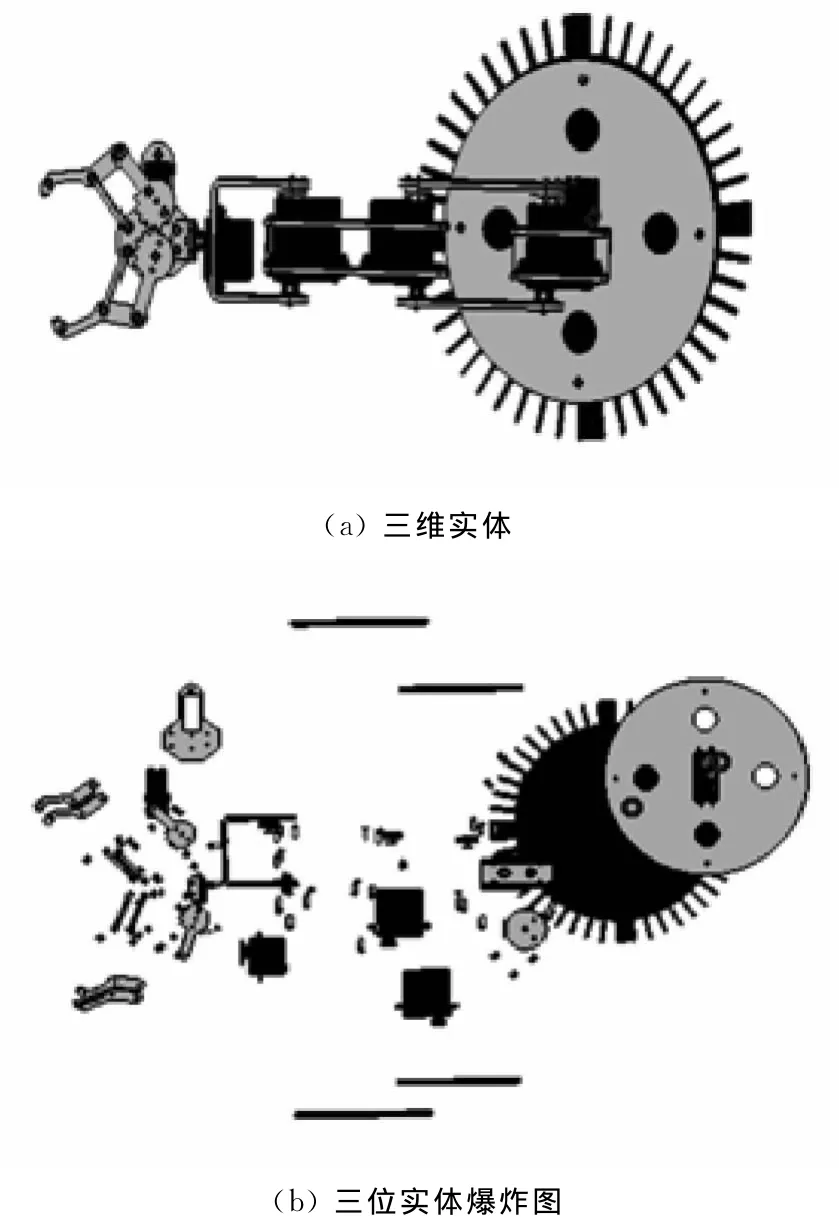
图6 三维实体模型
基于Catia三维建模软件,对微小型救援机器人手臂的传动机构进行参数化建模,并对其它关键零部件进行三维实体建模,实现了手臂参数化建模与自上而下的救援机器人手臂的虚拟装配[8]。为手臂的仿真分析提供样机模型,为微小型救援机器人手臂的优化设计提供了参考[9]。
4 实验与分析
为了验证已设计的机械手各部件之间的配合情况是否符合要求以及能否完成指定的抓取任务,对机械手进行实体试验。
在实验室中,模拟了微小型救援机器人的工作现场,对微小型救援机器人系统进行了联机调试,并对其进行了实际应用,实验如图7所示。

图7 机械手抓取及运动实验
仔细观察微小型救援机器人的实际工作情况,该机器人机械手能够实现对既定目标物体的精准定位并完成抓取,并且能够迅速及时地将物品带离现场,具有反应快速、灵活、可靠性高等优点。对于许多要求在恶劣环境下从事探测和防爆工作的人员,该机器人可以取代人进入到工作地点和完成任务。
实验结果表明,微小型救援机器人能够完成在一定条件下的防爆救援任务,证明了设计的合理性,能够满足设计的要求。
5 结 语
设计了微小型救援机器人的机械手,对其进行了结构设计,能够很好地抓取和释放目标物体,分析了机械手的工作空间,针对其机动能力、机械手的结构强度、抓取能力,选取了合理的驱动方式和材料,并对机械手进行了三维实体建模,为手臂的仿真分析提供样机模型,也为微小型救援机器人手臂的优化设计提供了基础和借鉴。试验表明,该机械手具有灵活、快速的优点。该机器人可以取代人进入到许多恶劣环境从事探测和危险排除工作,该机械手能够达到设计的工作空间范围,能够满足控制性能指标要求。综上所述,所设计的小型救援机器人机械手达到了设计要求。
[1] 柳虹亮,蔡赟,姜大伟.移动机器人控制系统硬件设计与开发[J].长春工业大学学报:自然科学版:2011,32(6)543-547.
[2] 周惠明.关节型机械手的结构创新设计[J].煤矿机械,2007,28(10):17-19.
[3] 王占礼.仿人按摩机器人手臂结构设计及改进[J].机械设计,2011(1):58-70.
[4] 陈航,殷国.工业机器人模块化设计研究[J].机器人技术,2009,36(3):56-58.
[5] 刘永平.小型双足步行机器人试验研究[J].河南工业大学学报,2006,9(8):20-25.
[6] 周惠明.关节型机械手的结构创新设[J].煤矿机械2007,28(10):17-19.
[7] 曾洪江,黄聪.CATIA V5机械设计从入门到精通[M].北京:中国青年出版社,2004:10-200.
[8] 陈幼平,马志艳,袁楚明,等.六自由度机械手三维运动仿真研究[J].计算机应用研究,2006(6):205-207.
[9] 左久林,邓丽君,王艳春,等.大型排爆机器人技术研究[J].微计算机信息,2010,11:159-160.
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
今日农业(2020年14期)2020-12-14
物流技术与应用(2020年4期)2020-05-06
制造技术与机床(2018年11期)2018-11-23
中国自行车(2018年8期)2018-09-26
河北农机(2017年12期)2018-01-20
制造技术与机床(2017年3期)2017-06-23
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
少儿科学周刊·少年版(2015年4期)2015-07-07
