空间柔性机械臂弯扭耦合振动的主动控制研究
2014-04-02 02:44娄军强魏燕定杨依领谢锋然
振动工程学报 2014年3期
娄军强, 魏燕定, 杨依领, 谢锋然
(1.浙江省零件轧制成形技术研究重点实验室,浙江 宁波 315211; 2.浙江大学现代制造工程研究所, 浙江 杭州 310027)
引 言
随着航天事业的飞速发展,融合航空航天技术和机器人技术的空间机械臂系统得到了广泛的应用[1]。由于太空环境的特殊性和空间操作任务的复杂性,人们对空间机械臂结构的要求越来越高,空间机械臂朝着多自由度、低刚度、柔性化和大型化的趋势发展,这使得空间机械臂的动力学响应表现为大范围的刚性运动和自身柔性振动相叠加的刚柔耦合特征。在太空环境中的内外部因素激励下,具有低频模态密集、固态阻尼小特征的柔性机械臂势必会产生低频、大幅值的持续振动,从而影响整个系统的位置精度和控制精度。因而对空间柔性机械臂的定位控制和振动控制的研究是目前空间技术领域中最重要的课题之一[2]。
许多研究者对空间柔性机械臂系统在运动过程中的振动控制问题进行了深入的研究,Z Mohamed, Ismael等通过控制伺服电机的驱动力矩对一个绕着刚性Hub旋转的单柔性机械臂的振动控制问题进行了研究[3,4];James等对一个平面两连杆柔性机械臂系统的动力学建模和振动控制问题进行了研究[5],研究中把柔性机械臂假设为欧拉-伯努利梁模型,并采用关节电机来抑制柔性臂的弹性弯曲振动,从而实现柔性臂系统运动过程中的振动抑制。另外,压电材料由于具有响应速度快、频响范围宽以及控制精度高的特点,被广泛应用到柔性机械臂的振动控制中,Dong Sun,邱志成等通过伺服电机控制单个柔性机械臂的旋转运动,同时利用压电致动器控制柔性臂的弹性弯曲振动,实现了单个旋转柔性臂的精确定位和振动抑制[6,7];E Mirzaee等利用奇异摄动法将平面两连杆柔性臂系统的运动分解成慢速的旋转运动和快速的弹性振动,并用关节电机和压电致动器分别控制,进一步证明了压电致动器和驱动电机联合控制的效果要优于单一的电机控制效果[8]。
但是对于执行操作任务的空间机械臂而言,由于柔性臂的大型化和柔性化,末端操作对象的转动惯量极易引起初级柔性杆件的扭转振动。而目前对机械臂的研究主要集中在单一机械臂或平面多连杆机械臂在运动过程中的振动控制问题,并且多是基于弯曲振动模型;而对柔性机械臂的扭转振动以及采用压电扭转致动器抑制其振动的研究却相对较少[9],对既有弹性弯曲又有弹性扭转的弯扭耦合的空间多连杆柔性机械臂的研究更是很少涉及,故对此类空间柔性机械臂在运动过程中的弯扭耦合振动控制问题有待深入研究。
为此提出对一伺服驱动的空间机械臂的振动控制问题进行研究。由于空间机械臂系统在运动过程中存在着弹性弯曲振动、弹性扭转振动以及刚性转动之间的刚柔耦合。因此本文在提出柔性臂的变形假设的基础上,采用假设模态法结合Lagrange方程建立空间柔性机械臂系统刚柔耦合的非线性动力学模型,然后在实现伺服电机PD运动控制的基础上,采用不同极化方式的压电致动器分别抑制柔性机械臂的弯曲振动和扭转振动,从而实现空间柔性机械臂在大范围运动过程中的振动主动控制,提高系统末端的定位精度。
1 动力学建模
伺服驱动的空间柔性机械臂系统的结构如图1所示,末端柔性机械臂6(矩形薄壁构件)通过转动关节8与柔性臂3(中空薄壁圆柱杆件)相连,并在关节电机4的作用下产生转动,伺服电机1通过驱动柔性轴3实现整个柔性机械臂系统的大范围转动运动。其中7为末端操作对象,坐标系xoy为惯性参考系,x1oy1为固定在柔性轴3顶端的参考系,xooyo为固连在柔性臂6根部的参考系,并始终与柔性臂6的轴线相切。在伺服电机驱动整个机械臂系统旋转运动的同时,为了抑制柔性机械臂系统在伺服驱动过程中产生的弯曲振动和扭转振动,采用不同极化方式的压电致动器2和5分别抑制柔性臂3的扭转振动和末端柔性臂6的弯曲振动,达到提高系统末端定位精度的目的。

图1 伺服驱动的空间柔性机械臂系统结构简图
由于空间柔性臂系统在执行工作任务时,运动速度不高,不考虑动力钢化效应。在系统建模的过程中,忽略轴向变形和剪切变形的影响,柔性臂6可以看作欧拉-伯努利梁;由于末端操作对象相对于柔性臂3有着较大的转动惯量,假设柔性臂3为作扭转运动的弹性轴,为了简化分析,暂不考虑柔性臂6在关节电机4驱动下的运动。其中末端操作对象质量为mo;伺服电机、关节(包括关节电机和转动关节)的转动惯量分别为Jm,JH;柔性臂3的内外径、长度、材料密度以及扭转刚度分别为Rin,Rout,ls,ρs,Gs,Ips;柔性臂6的长度、截面面积、材料密度以及抗弯刚度分别为lb,Ab,ρb,EbIb。
1.1 变形描述
设柔性臂3满足纯扭转振动的条件,不计结构和材料阻尼[9],根据假设模态法,柔性杆件扭转振动位移为
(1)
式中n为保留的模态阶数;ψ(z)=(ψ1,ψ2,…,ψn)为扭转模态振型矢量;η(t)=(η1,η2,…,ηn)T为广义扭转模态坐标矢量。具体的针对柔性臂3,采取一端固定一端存在末端等效圆盘的边界条件,得到柔性臂3扭转振动的第i阶模态振动角频率方程和振型函数如下
(2)

如果假定柔性臂6符合欧拉-伯努利梁条件,采用假设模态法,相应可以得到其横向弯曲振动位移为
(3)
式中m为保留的模态阶数;Φ(x)=(Φ1,Φ2,…,Φm)为弯曲模态振型矢量;q(t)=(q1,q2,…,qm)T为广义弯曲模态坐标矢量。
柔性臂6的一端通过转动关节与柔性臂3相连,另一端存在末端操作对象mo,因此:x=0处,位移为零,梁的弯矩和轴的扭转变形带来的惯性扭矩相等;x=lb处弯矩为零,剪力等于集中质量的惯性力。将上述边界条件带入到梁的振动方程中,得到柔性臂6弯曲振动的第k阶弯曲模态频率方程为
(1 +Kα)
(4)

与之相对应的振型函数为
Φk(x)=chβkx+λkshβkx-cosβkx+χksinβkx
(5)

1.2 动力学方程建立
设伺服电机的转动角位移为θ,综合考虑伺服电机的转动,柔性臂3的弹性扭转变形以及柔性臂6的弹性弯曲变形,在弹性变形为小变形的前提下,柔性臂6上任意一点P速度的平方为
(6)
相对于柔性臂,压电致动器的结构尺寸较小,暂不考虑其对系统结构的影响,包含柔性臂3、关节电机、转动关节、柔性臂6以及末端操作对象在内的整个空间柔性机械臂系统的动能为
(7)

系统的势能包括柔性臂3扭转变形产生的扭转势能和柔性臂6弯曲变形产生的弯曲势能,系统的总势能为
(8)

利用压电剪切致动器控制柔性臂的弯曲振动目前研究较为成熟,而利用压电扭转致动器控制柔性臂的扭转振动的研究则相对较少[10]。魏燕定分别利用d31和d15极化方式的压电致动器实现了柔性梁弯曲和柔性杆扭转振动的主动控制。设伺服电机的驱动力矩为T,在伺服电机驱动力矩、压电剪切致动器和压电扭转致动器的控制力矩下,空间柔性臂系统的广义力虚功为
(9)
式中r,s,c1,c2分别为压电剪切致动器和压电扭转致动器的个数和控制系数,具体参数表达式参看文献[11];xbpi,lbpi为第i个压电剪切致动器的位置和长度;ztpj,ltpj为第j个压电扭转致动器的位置和长度。
如果进一步化简公式(9)得到
(10)
利用Lagrange方程,得到伺服驱动的空间柔性机械臂系统的动力学方程为
(11)
H=
对于系统的动力学方程有以下几点说明:
1.M(q,η)为系统的质量矩阵,mθθ项为系统的综合转动惯量;包括关节电机、柔性臂3、柔性臂6、末端质量的转动惯量以及柔性弯曲振动产生的非线性项,mθq代表系统刚性转动和柔性臂6的弹性弯曲运动之间的耦合惯量;mθη代表系统刚性转动和柔性臂3的弹性扭转运动之间的耦合惯量。
3.如果假定系统的阻尼矩阵C满足正交性条件,为质量矩阵M和刚度矩阵K的线性组合,则阻尼矩阵C=aM+bK很容易就可以加入到系统的动力学方程中。
2 控制策略研究
2.1 基于Lyapunov稳定性的速度反馈控制策略研究
从系统的动力学方程可以看出,空间柔性机械臂系统是一个刚性转动、弹性弯曲振动和弹性扭转振动互相耦合的复杂非线性系统。为了实现系统在运动过程中的振动抑制,首先通过控制伺服电机的驱动力矩保证系统大范围的刚性转动,其次分别控制压电剪切致动器和压电扭转致动器的驱动电压来实现柔性机械臂6的弯曲振动和柔性机械臂3的扭转振动的主动控制。为了保证控制系统的稳定性,采用Lyapunov直接法设计出系统的控制器。暂不考虑阻尼矩阵项,构造的Lyapunov函数如下[12]
(12)
式中 Δθ=θ-θd为伺服电机角度跟踪误差。
(13)
由于柔性臂3的扭转角速度便于测量,对压电扭转致动器采取A型模态角速度反馈控制,则取压电扭转致动器的驱动电压为
(14)
而柔性臂6的弯曲运动角速度相对不易测量,对压电剪切致动器采用L型模态线速度反馈控制(FLVC),压电剪切致动器的驱动电压为
(15)
2.2 模糊自适应调节控制策略研究
模态速度负反馈控制技术对于标称模型可以取得很好的控制效果,但是由于研究的空间柔性机械臂系统是一个刚柔耦合、弯扭耦合的非线性时变系统,其控制效果会有所下降,并且受压电材料驱动电压的限制,压电材料的致动能力有限。为了提高系统的控制效果,本文将模糊控制技术与模态速度反馈控制技术相结合,利用模糊控制器实时在线调整模态速度反馈控制系数,在充分发挥压电致动器控制能力的基础上,进一步提高系统的控制效果。
设计的模糊控制器为两输入两输出,输入量分别为柔性臂6的弯曲运动线速度绝对值V和柔性臂3的扭转运动角速度绝对值θ,输出分别为L型线速度反馈控制系数Kbp和A型模态角速度控制系数Ktp,为了简化模糊控制器的设计,模糊输入量V和模糊输入量θ采用同一个基本论域和隶属度函数如图2所示,只是量化因子不同;模糊输出量Kbp和模糊输入量Ktp同样采用同一个基本论域和隶属度函数见图3,但是二者的比例因子不同。
根据线速度反馈控制系数Kbp和角速度反馈控制系数Ktp对系统动态响应的影响,制定相应的模糊控制规则,如表1所示。
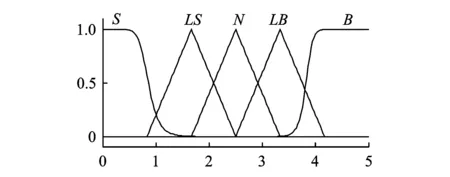
图2 输入变量V (θ)的隶属度函数曲线
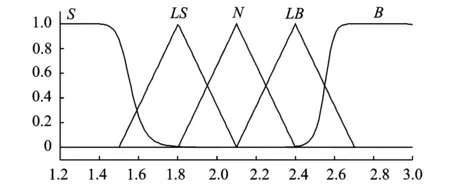
图3 输出变量Kbp (Ktp)的隶属度函数曲线
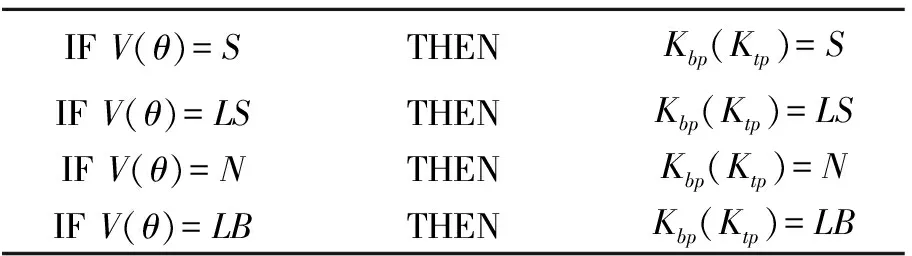
表1 模糊控制器推理规则
2.3 基于Lyapunov稳定性的模糊自适应速度反馈控制策略研究
系统的总体控制框图如图4所示,整个控制系统分为三部分:首先以安装在伺服电机上的光电编码器输出的角度和角速度信号为反馈控制信号,采用PD控制算法实现伺服电机的输出驱动力矩控制,保证系统在大范围内的转动运动精度。其次以贴在柔性臂6上的应变片输出的弯曲振动速度信号为反馈信号,采用L型模糊自适应线速度反馈控制算法(FLVC) 实现压电剪切致动器的控制电压输出,抑制系统在运动过程的弯曲振动。再以粘贴在柔性臂3上的应变片输出的扭转振动速度信号为反馈信号,采用A型模糊自适应角速度反馈控制算法(FAVC) 实现压电扭转致动器的控制电压输出,抑制系统在运动过程中的扭转振动,最终实现了空间机械臂系统在运动过程中的振动主动控制。
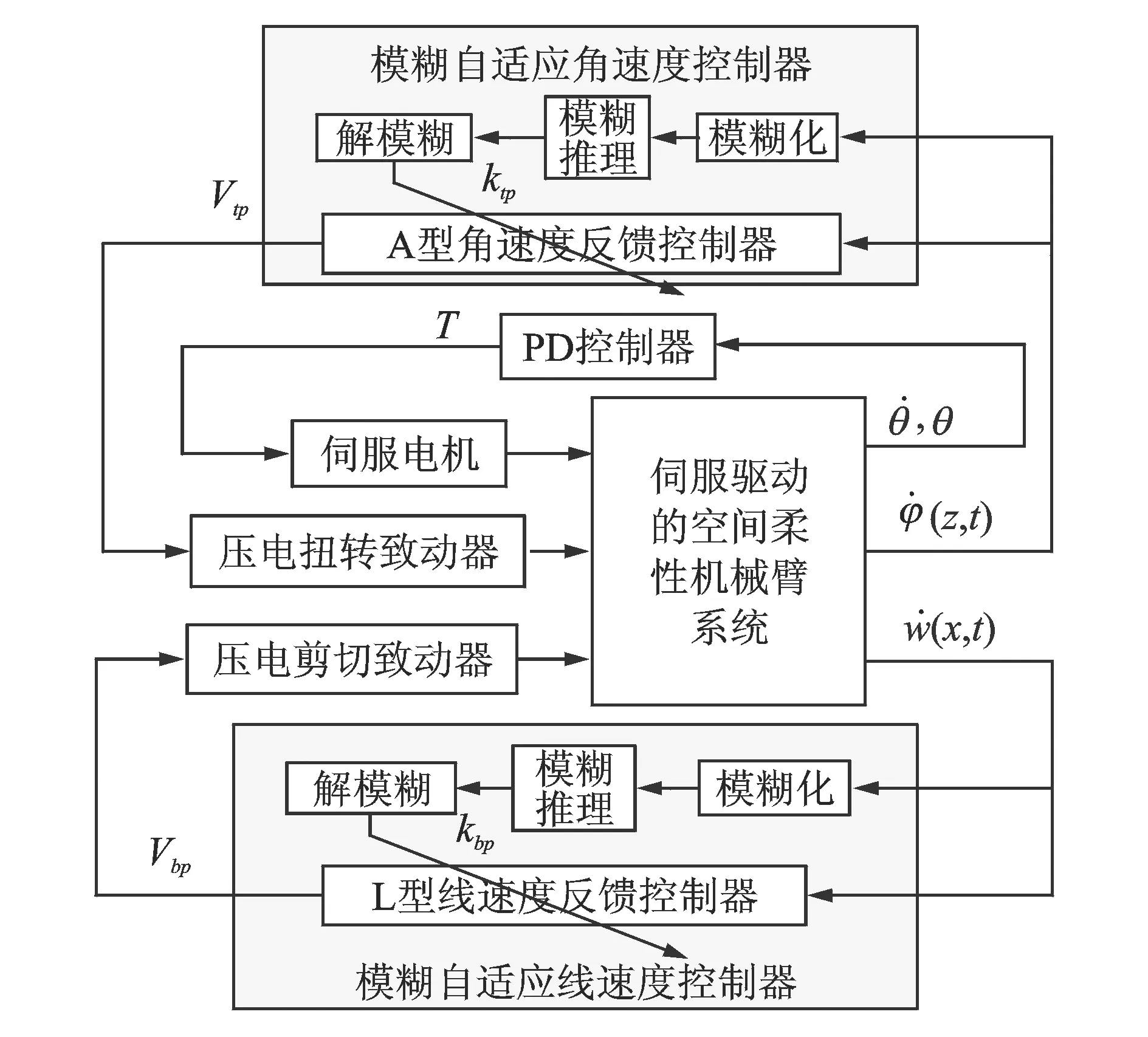
图4 基于Lyapunov稳定性的模糊自适应速度反馈控制系统结构
3 系统仿真研究
针对图1所示的伺服驱动的空间柔性机械臂系统,采用图4所示的复合控制策略进行了数值仿真试验,在机械臂3的根部同位粘贴一个压电扭转致动器和一组应变片,实现扭转振动信号的传感检测及控制;在机械臂6的根部两侧同位粘贴一个压电剪切致动器和一组应变片,实现弯曲振动信号的检测及控制,系统各构件的物理参数如下:
机械臂3和6均为不锈钢材料,密度ρs=7 750 kg/m3,剪切模量Gs=76.9 GPa,弹性模量Eb=200 GPa。臂3为中空的不锈钢管,长度、内径外径为800 mm×18 mm×21 mm。机械臂6为矩形不锈钢梁,长、宽、高为900 mm×50 mm×3 mm。
压电扭转致动器与压电剪切致动器均采用PZT-5A材料,压电应变常数d15=700×10-12m2/N,d13=210×10-12m2/N。扭转致动器的长度、内径外径为60 mm×21 mm×24 mm,片数Ntp=6。剪切致动器长、宽、高为70 mm×50 mm×1 mm。
转动关节的转动惯量为0.01 kg·m2,关节电机的转动惯量0.04 kg·m2,末端操作对象mo=0.15 kg。
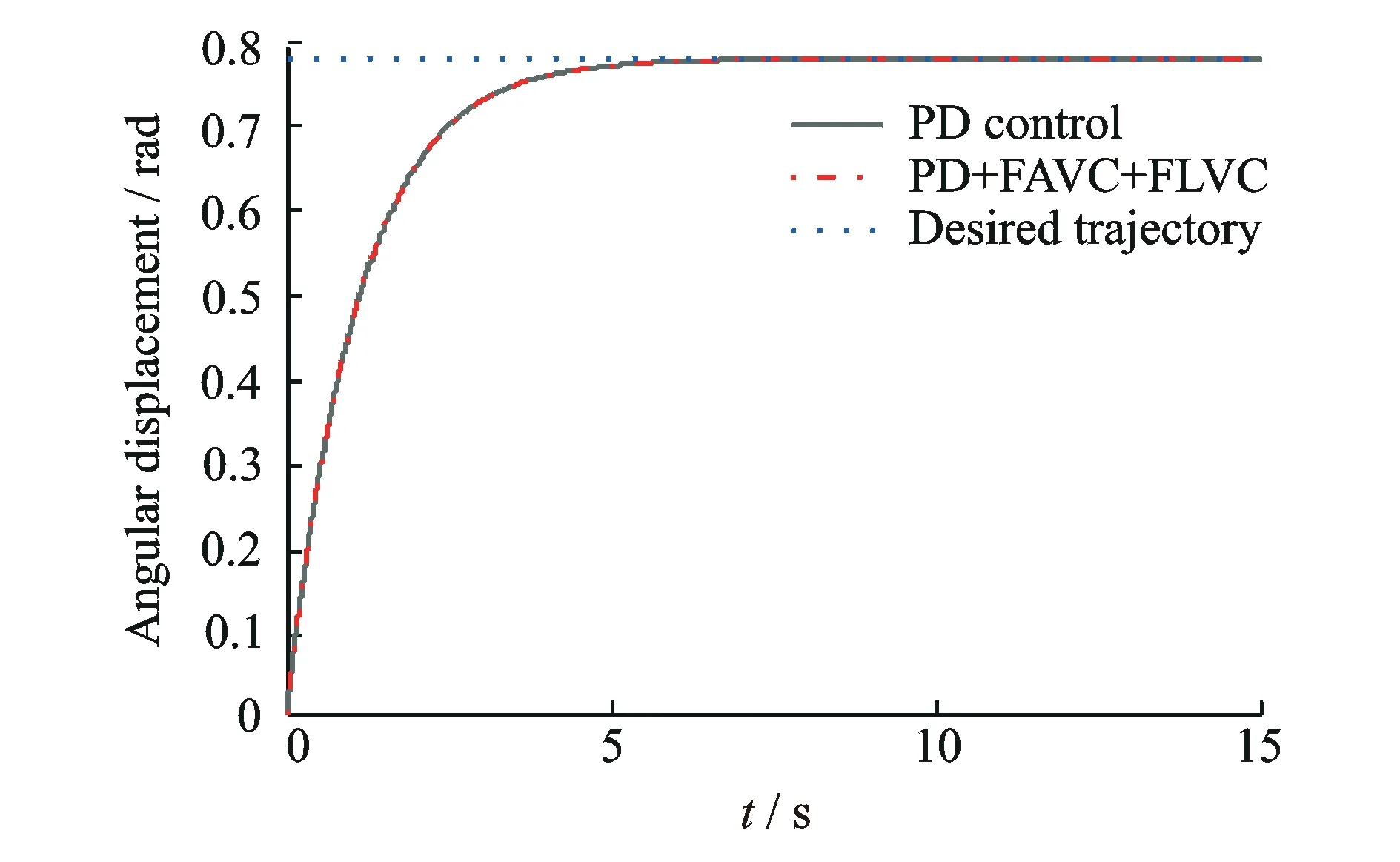
图5 伺服电机的转角位移
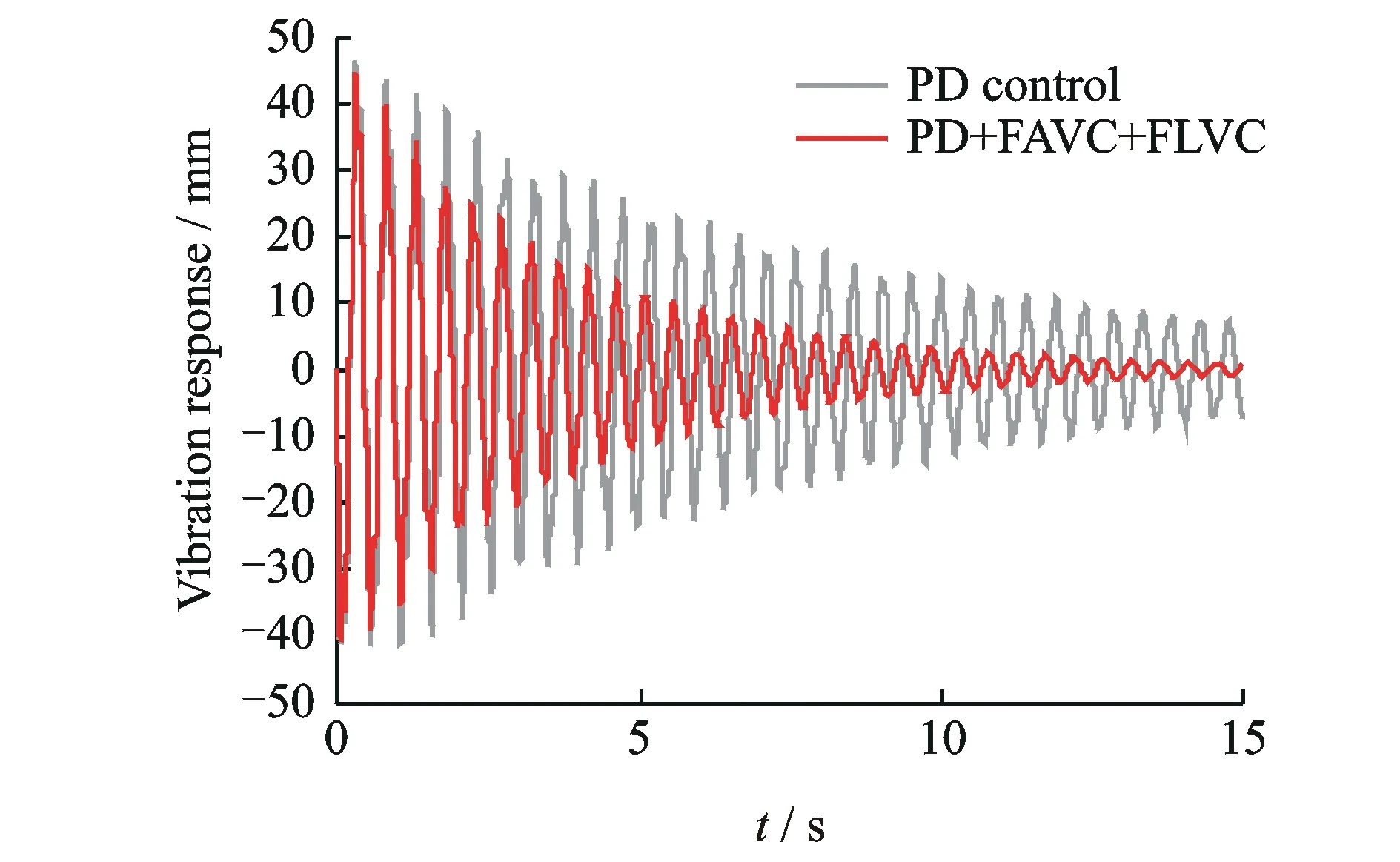
图6 一阶弯曲振动引起的末端操作对象的振动响应
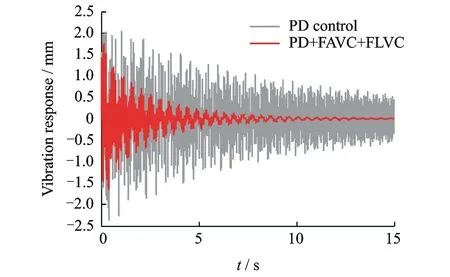
图7 二阶弯曲振动引起的末端操作对象的振动响应
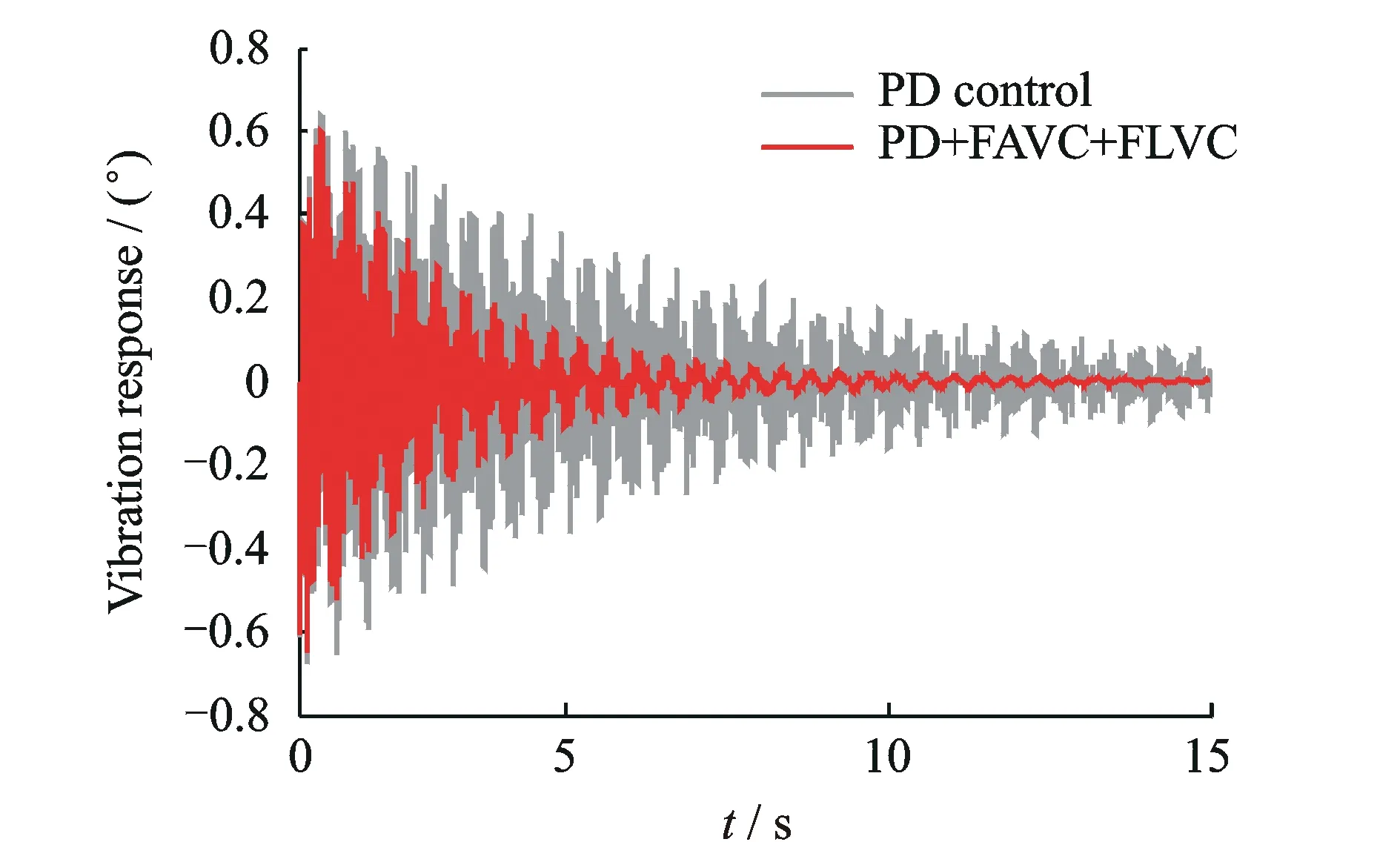
图8 一阶扭转振动引起的末端操作对象的振动响应
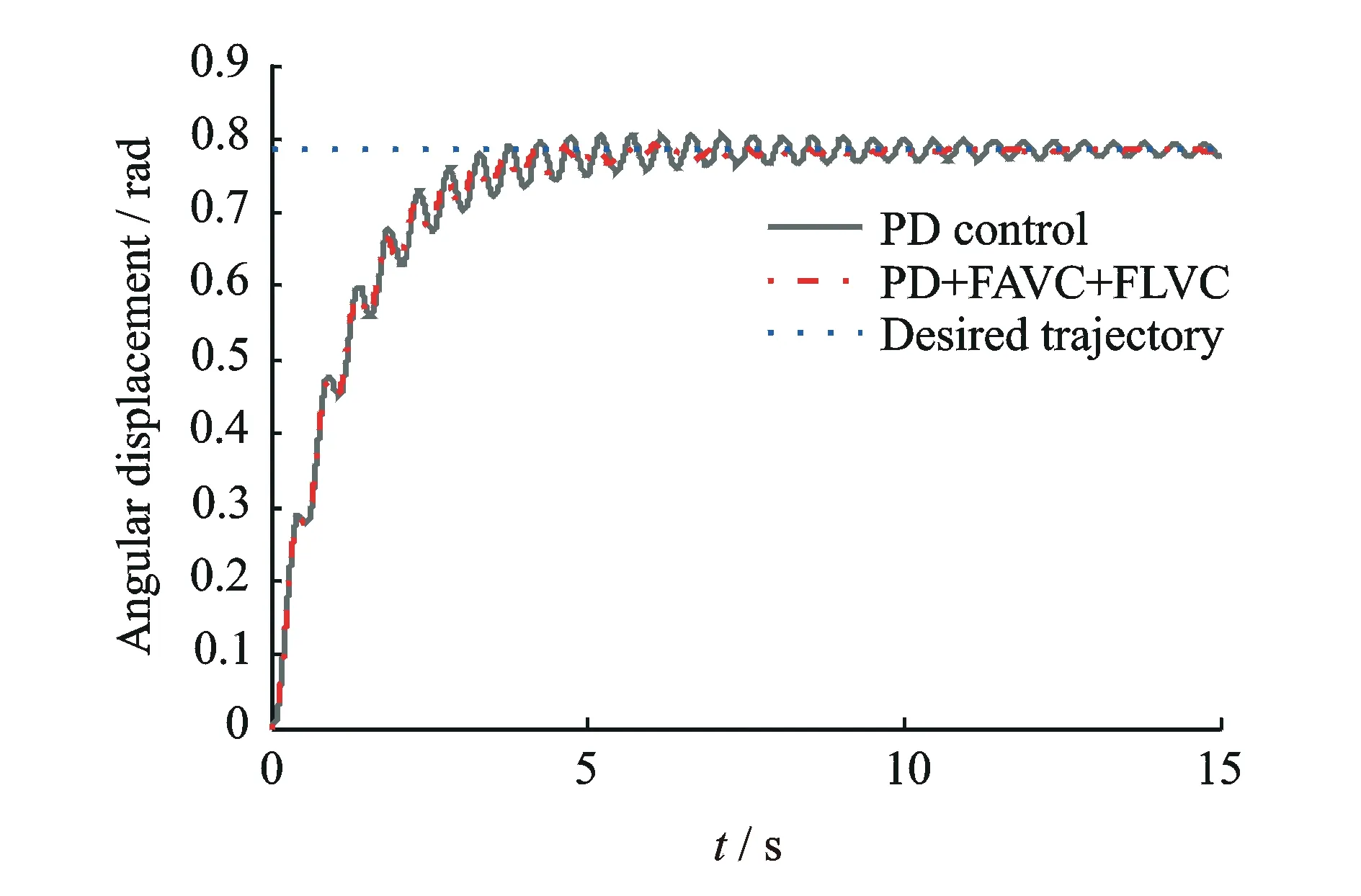
图9 末端操作对象的转角位移
不考虑压电材料的影响,利用假设模态法计算得到柔性臂3的前两阶扭转振动频率分别为6.72, 1 953.2 Hz,柔性臂6的前3阶弯曲振动频率分别为2.25, 15.20和44.74 Hz,由于高频的模态分量对系统的影响相对较小,因此只对机械臂3的一阶扭转振动和机械臂6的前两阶弯曲振动进行抑振控制研究,仿真运动过程是在伺服电机的驱动下,实现整个空间机械臂系统从θ=0运动到θ=π/4 rad。由于整个系统的强耦合性,为了实现较高的定位精度,必须对运动过程中的弯曲、扭转弹性振动进行抑制。在运动仿真的过程中,假定柔性臂6的模态阻尼系数为0.01,柔性臂3的扭转模态阻尼系数为0.02,图5~10显示了在两种不同的控制策略下的仿真实验结果:a)PD control,仅伺服电机的PD控制策略;b)PD+FAVC+FLVC,伺服电机PD控制、压电剪切致动器的模糊L型线速度反馈控制、压电扭转致动器的模糊A型角速度反馈控制复合控制策略。
如图5所示,虽然伺服电机的PD控制策略可以保证伺服电机输出精确的驱动转角位移,但是由于系统存在着刚柔耦合和弯扭耦合,空间柔性机械臂系统在大范围转动的过程中不可避免地产生了弯曲和扭转弹性振动,并且仿真结果表明由于弯曲振动和扭转振动带来的末端操作对象的位置误差是不能忽略的,如图5~8中PD曲线所示,因此对柔性臂6的弯曲振动和柔性臂3的扭转振动进行振动抑制是很有必要的。而利用本文提出的基于Lyapunov稳定性的模糊自适应速度反馈控制策略,通过压电剪切致动器和压电扭转致动器的控制,系统的弯曲振动和扭转振动都得到了很好的抑制,如图5~8中PD+FAVC+FLVC曲线所示,实现了整个空间柔性机械臂系统的振动控制,提高了系统的运动精度以及末端操作对象的定位精度,试验结果见图9。
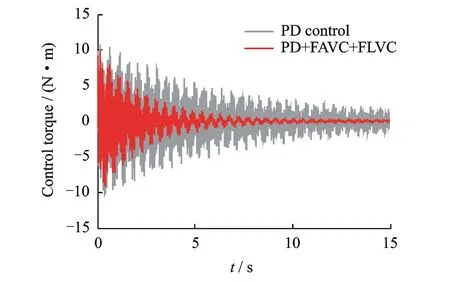
图10 伺服电机的控制扭矩
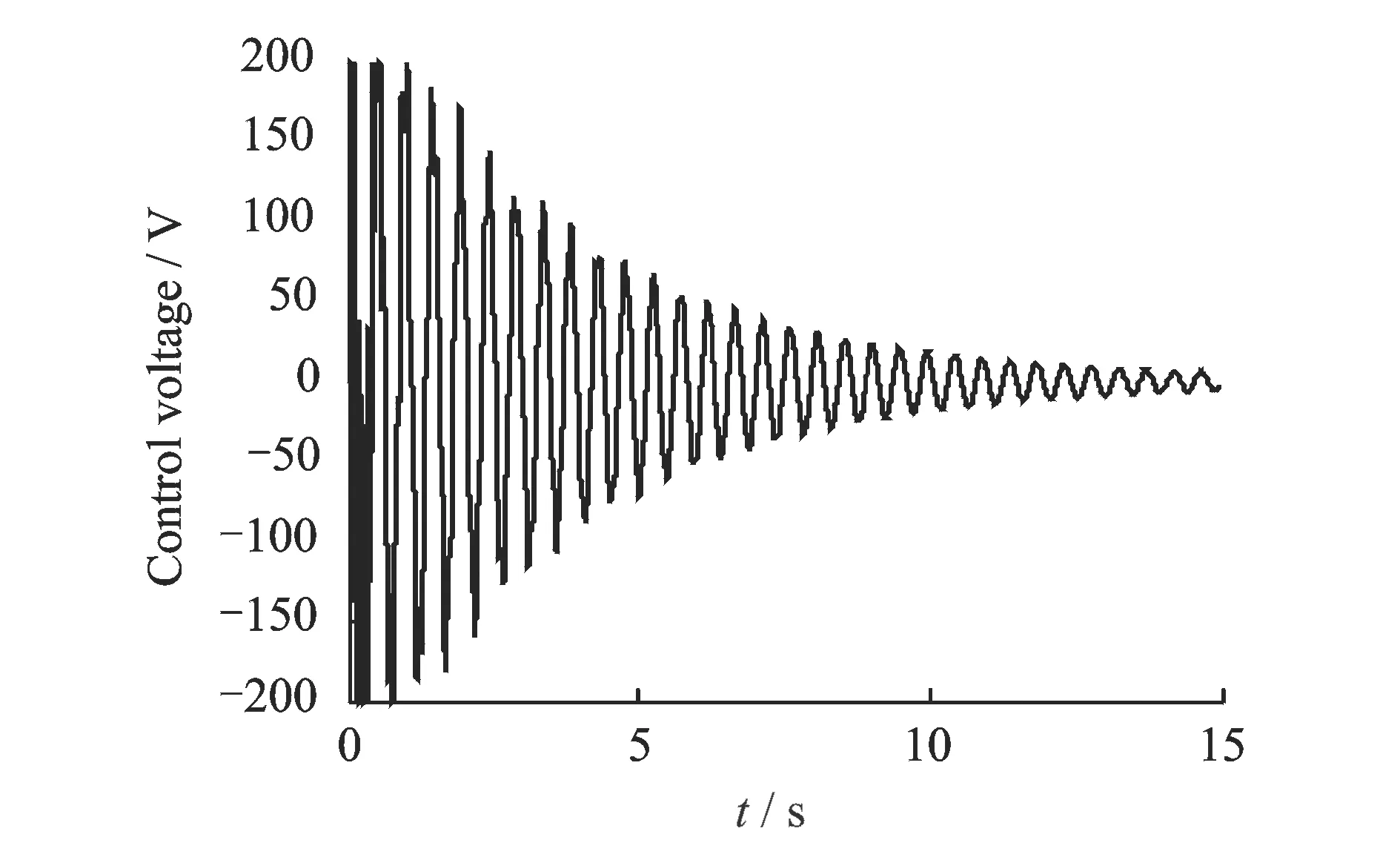
图11 压电剪切致动器的控制电压
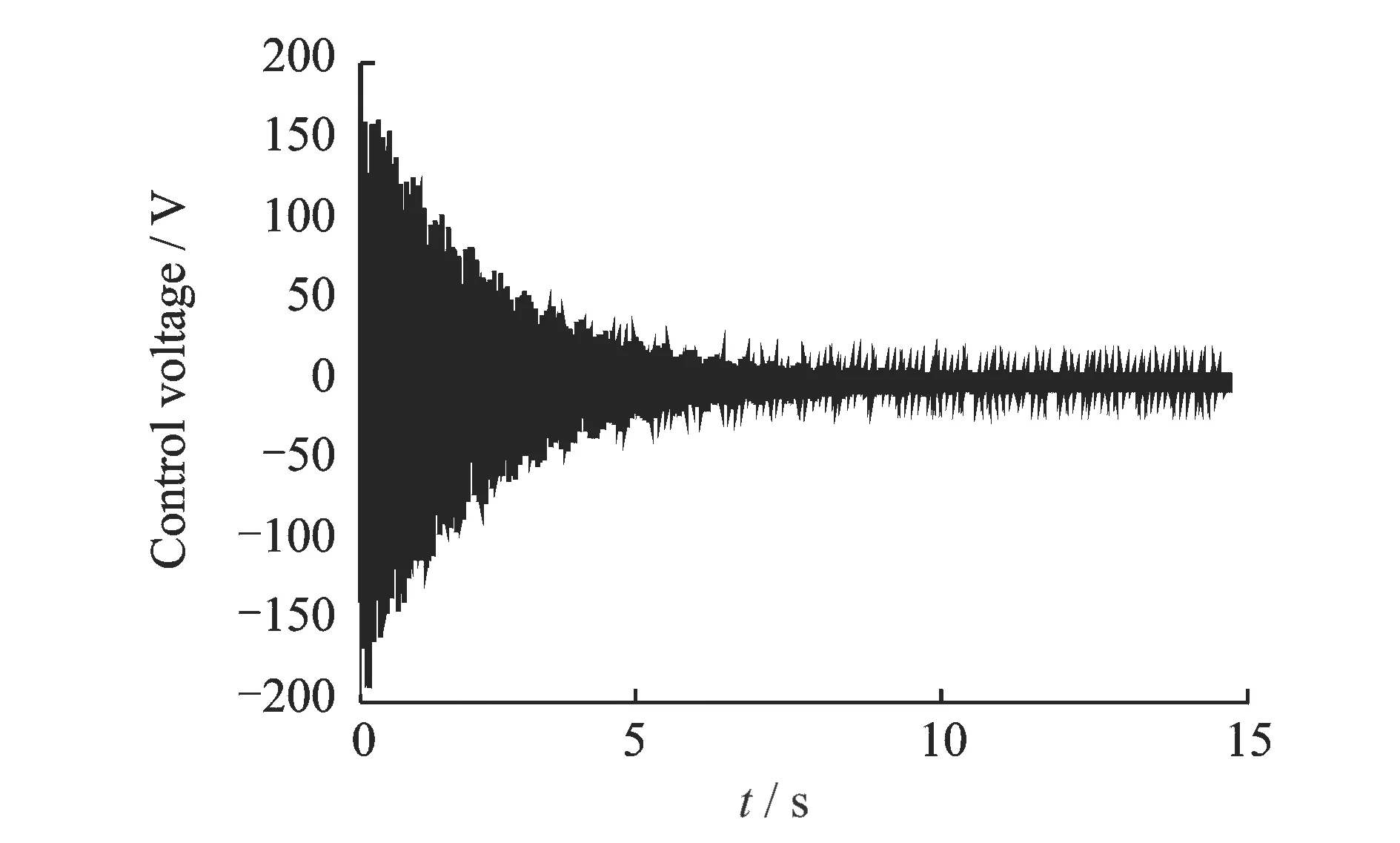
图12 压电扭转致动器的控制电压
图10给出了在PD和PD+FAVC+FLVC两种控制策略下的伺服电机的驱动扭矩,可以看到:在压电剪切致动器和压电扭转致动器的控制作用下,不仅可以抑制系统的柔性弹性振动,同时可以提高系统的刚性转动精度,从而大幅度地减小伺服电机的驱动电压,进一步提高系统的运动精度。
图11和12为压电剪切致动器和压电扭转致动器的驱动电压,由于受限于压电驱动器的驱动电源,设定压电致动器的驱动电压不大于200 V,在试验的过程中通过相应的饱和模块实现。
4 结 论
1)通过对伺服驱动的空间柔性机械臂系统的动力学分析表明,由于机械臂的结构形式和末端操作对象的影响,系统存在着强烈的刚柔耦合、弯扭耦合的非线性特性。为了提高机械臂系统末端的定位精度,必须要对系统在伺服驱动中产生的弹性振动进行抑制。
2)在通过伺服电机驱动保证空间机械臂系统大范围内刚性运动的同时,分别利用压电剪切致动器和压电扭转致动器抑制机械臂系统的弯曲及扭转弹性振动的控制方法是可行的。本文提出的模糊自适应模态速度反馈控制策略是有效的,抑制了系统在运动中产生的弹性弯曲、扭转振动,提高了末端操作对象定位精度。
参考文献:
[1] Sabatini M, Gasbarri P, Monti R, et al. Vibration control of a flexible space manipulator during on orbit operations[J]. Acta Astronautica, 2012,73: 109—121.
[2] Malekzadeh M, Naghash A, Talebi H A. A robust nonlinear control approach for tip position tracking of flexible spacecraft[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011,47(4): 2 423—2 434.
[3] Mohamed Z, Tokhi M O. Command shaping techniques for vibration control of a flexible robot manipulator[J]. Mechatronics, 2004,14(1): 69—90.
[4] Payo I, Feliu V, Daniel Cortazar O. Force control of a very lightweight single-link flexible arm based on coupling torque feedback[J]. Mechatronics, 2009,19(3): 334—347.
[5] Forbes J R, Damaren C J. Design of optimal strictly positive real controllers using numerical optimization for the control of flexible robotic systems[J]. Journal of the Franklin Institute-Engineering and Applied Mathematics, 2011,348(8): 2 191—2 215.
[6] Sun Dong, Mills J K, Shan Jinjun,et al. A PZT actuator control of a single-link flexible manipulator based on linear velocity feedback and actuator placement[J]. Mechatronics, 2004,14(4): 381—401.
[7] 邱志成. 刚柔耦合系统的振动主动控制[J]. 机械工程学报, 2006,42(11): 26—33.Qiu Zhicheng. Active vibration control for coupling sys—tem of flexible structures and rigid body[J]. Chinese Journal of Mechanical Engineering, 2006,42(11):26—33.
[8] Mirzaee E, M Eghtesad, S A Fazelzadeh. Maneuver control and active vibration suppression of a two-link flexible arm using a hybrid variable structure/Lyapunov control design[J]. Acta Astronautica, 2010,67(9-10): 1 218—1 232.
[9] 谢官模. 振动力学[M]. 北京: 国防工业出版社, 2007.
[10] 魏燕定, 吕永桂, 吕存养, 等. 机器人柔性臂的扭转振动主动控制研究[J]. 浙江大学学报(工学版), 2005,39(11): 1 761—1 764.Wei Yanding, Lv Yonggui, Lv Cunyang, et al. Active torsional vibration control of flexible manipulator [J]. Journal of Zhejiang University(Engineering Science), 2005,39(11):1 761—1 764.
[11] 吕永桂. 基于压电致动器的柔性构件振动主动控制技术研究[D].杭州:浙江大学,2007.Lv Yonggui. Study on active vibration control techniques for flexible structure using piezoelectric actuators D]. Hangzhou: Zhejiang Uinversity,2007.
[12] Gurses K, B J Buckham, E J Park, Vibration control of a single-link flexible manipulator using an array of fiber optic curvature sensors and PZT actuators[J]. Mechatronics, 2009,19(2): 167—177.
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
石油沥青(2021年5期)2021-12-02
陶瓷学报(2021年3期)2021-07-22
文化创新比较研究(2020年7期)2021-01-13
微特电机(2020年11期)2020-12-30
电子制作(2018年17期)2018-09-28
铜仁学院学报(2018年6期)2018-07-05
通信电源技术(2018年3期)2018-06-26
电子制作(2016年1期)2016-11-07
振动、测试与诊断(2014年6期)2014-03-01