
行路难
——挑战恶劣环境的月球车
2014-04-15 02:44□士元
天文爱好者 2014年4期
□ 士 元
行路难
——挑战恶劣环境的月球车
□ 士 元

美国航天员向月球车上搬运采集的月岩和月壤样品
2014年2月22日,我国玉兔号月球车第三次进入月夜休眠。在进入第二个月夜休眠前,玉兔号出现了机构控制异常情况,后来虽然被唤醒,进行了定点探测,但问题仍然存在。其实,在人类的月球车发展史上一直充满了风险,这主要是因为月球环境太复杂,甚至超过了火星,所以至今国外也只发射并运行成功了2辆无人月球探测车,而发射并运行成功的无人火星探测车已达到4辆。
不过,人类对月球探测的科学内涵正在不断扩展,它包括关于月球的科学、基于月球的科学和居于月球的科学三个方面。根据这样的理念,未来的月球探索不仅要发射大量的轨道器对月球进行普查,还要进行更多的月面活动,对月球进行详查。所以,用月球车对月面某一区域进行探测十分重要,是未来对月球进行深入探测的基础和条件。
车分两类
月球车是进行月球表面探测的重要工具之一。按照探测方式分,月球车一般分为两类:一类是无人驾驶的月球探测车,它由轮式底盘和仪器舱组成,载有多种科学探测设备,用太阳能电池和蓄电池联合供电,是靠地面遥控指令或自主控制在月面进行巡视探测,前苏联在20世纪70年代发射的月球车1号、2号属于这类月球车。另一类是有人驾驶的载人月球车,它主要作为航天员在月面活动的交通工具,用于扩大航天员的活动范围和减少航天员的体力消耗,并随时存放航天员收集的岩石和土壤标本,乘阿波罗15号、16号、17号载人飞船登月的美国航天员曾使用这种类似电瓶车的月球车在月面活
漫游四方
无人月球探测车是一种在月面进行巡视探测的行走装置,它必须能够适应月球环境,此外还可以通过携带动。至今,国外一共成功发射、运行过5辆月球车,即用于在月面进行无人巡视探测的前苏联月球车1号、2号和用于在月面运送航天员进行科学探测的美国3辆有人驾驶的载人月球车。
前苏联无人月球探测车能在月面自动行走,爬14度的坡,可转弯和倒车。
按走行方式,月球车还可分为轮式、腿式、蛇式、轮腿式、跳跃式、履带式等多种类型。不过,目前已使用的月面巡视探测器都采用轮式,因此叫月球车更为通俗易懂。轮式月球车还可分为4轮式、6轮式、8轮式等,目前常用6轮式月球车。科学探测仪器在月面进行巡视探测,并把探测数据传送回地球。因此,无人月球车实际上就是一种能够在月球移动并完成探测任务的机器人。
在技术上,无人月球探测车要能适应月球辐射强、弱重力(月球重力是地球的1/6,月壤很松软,行进效率会降低)、路况复杂(月面崎岖不平,月球车的轮子既不能打滑,也不能翻车,并可前进、后退、转弯、爬坡、取物、采样和翻转)、温差很大(月球的1天温度相差大约310℃)等不利条件,并具有自主工作能力(达到初级人工智能,例如,具有识别、爬越或绕过障碍物等能力)。
载人月球车也需适应月球环境,但携带的科学仪器很少,且在漫游过程中无须具有遥控功能。不过,它需具有载人行驶和运货功能,并要求速度较快。在“阿波罗”登月使用载人月球车之后,国外专家还提出过不少载人月球车的方案,例如,月球摩托车、火箭单座车、月球拖挂车、月球轨道巴士、中型月球探险车、客货两用月球车、双座多用途高性能小型月球车等,但都没有投入实用。在美国小布什总统执政期间,美国为了重返月球,曾实施星座计划,为此研制了密封式月球车,即航天员在该车内可以不穿登月服,但随着星座计划的取消,这种月球车也不了了之了。

前苏联月球17号着陆器落月过程示意图

前苏联月球17号着陆器载月球车1号在月面着陆示意图

前苏联月球车1号离开着陆器进行巡视探测示意图
无人神探
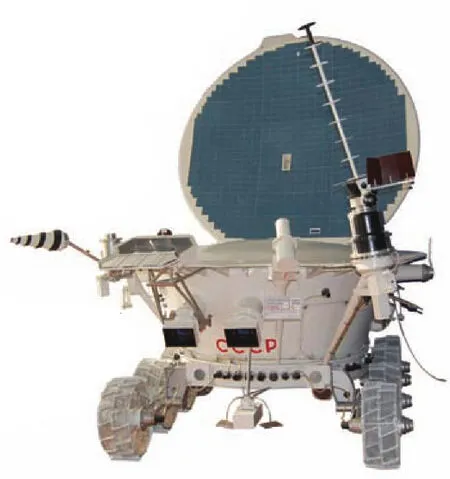
1970年11月10日和1973年1月8日,前苏联先后用质子号运载火箭发射了月球17号和21号月球探测器。其着陆器质量约1080千克,着陆机构为4个腿式缓冲着陆架,携带了着陆雷达、姿态控制系统、推力可调的发动机系统、陀螺、探测温度和辐射的仪器等。月球17号在月球雨海地区软着陆,月球21号在月球默尼环形山软着陆。
月球17号和21号着陆器携带的月球车1号、2号基本相同,都装有8个轮子,长为2.13米,轴距为1.70米,车轮直径为0.51米,宽度为0.20米,车轮动力范围为0.1米,行驶速度为1~2千米/小时,可翻越30°的坡,电源采用太阳电池阵列+蓄电池,在月夜期间,通过钋-210放射性同位元素加热器保温。
它们的不同之处是:月球车1号的质量为756千克,装有2副天线、4台摄像机、月壤探测器、X射线光谱仪、X射线望远镜、宇宙射线探测器和激光设备等科学仪器,在月面行驶了10.5千米,工作了10个月,后由于能源不足停止了工作;月球车2号的质量为840千克,装有3台摄像机、月壤探测器、太阳X射线实验仪器、天体光度测量计、磁力计、辐射计等科学仪器,虽然由于故障只工作了4个月,但在月面行驶了37千米,地面人员可通过月球车2号发回的图像来指挥其在月面的行走。另外,相比月球车1号,月球车2号在结构上有所改进,运动速度有所提高,摄像性能有所改善,活动范围大幅增加。
我国玉兔号月球车与前苏联月球车相比有一些共同点,例如,都是用着陆器携带到月面软着陆,都采用轮式移动系统,工作电源都采用太阳电池阵列+蓄电池,在月夜期间都是通过同位素热源保温。它们也有不同之处,例如,玉兔号的质量为140千克,6个轮子;玉兔号上装的测月雷达是在世界月球探测器上首次使用。与前苏联月球车相比,我国玉兔号的最大特点就是小而精,智能化程度非常高,所携带的仪器非常先进。比如,月球17号和21号月球探测器是盲降,而我国嫦娥3号落月时增加了悬停和避开障碍功能,大大减少了落月时的风险;月球17号和21号着陆器基本没有探测功能,而嫦娥3号着陆器和月球车都有探测功能。

我国玉兔号月球车工作实景
运人工具
1971年7月~1972年12月,美国先后发射了阿波罗15号、16号、17号载人登月飞船,它们各自装有一辆折叠式载人月球车,并且基本相同,均可在月面弱重力、真空环境中行驶,从而扩大了航天员的舱外活动范围。每辆“阿波罗”月球车质量约210千克,长3米,轴距2.3米,高1.1米,有4个轮子(每个轮子各由一台发动机驱动,靠蓄电池提供动力,轮胎在-100°C低温下仍可保持弹性),电源采用银锌氢氧化钾一次性电池,行驶速度为10~12 千米/小时,能携带约490千克的有效载荷。车上装有2个并排的可折叠座位,每个座位有可调节的踏板和安全带。车前端桅杆上装有大型网状碟型天线。航天员通过位于两个座位之间的T形手动控制器来控制漫游车。手柄前部有一个控制与显示模块,显示当前的速度、方向、电源和温度情况。其最高时速可达16千米,航天员坐在里面驾驶着它在月球表面巡游,以车代步,爬越障碍,翻越沟壑,对山脉、峡谷和火山口进行考察,并把激动人心的彩色图像传回地面。
阿波罗15号的月球车总共行驶了27.76千米,总时间为3小时2分钟,最长单次行驶距离为12.47千米,离开登月舱的最长距离为5千米,收集了约77千克月球样品;阿波罗16号的月球车总共行驶了26.55千米,总时间为3小时26分钟,最长单次行驶距离为11.59千米,离开登月舱的最长距离为4.5千米,收集了约96千克月球样品;阿波罗17号的月球车总共行驶了35.89千米,总时间为4小时26分钟,最长单次行驶距离为20.12千米,离开登月舱的最长距离为7.6千米,收集了111千克月球样品。其中在阿波罗17号任务中,由于月球车和航天服的可靠性增加,缓解了月球车行驶距离的局限,所以航天员驾驶月球车行驶的距离最长。
美国航天员使用月球车时受到了微粒非常细小的月球尘埃影响,尘埃会使轴承、齿轮和密封的其他机械结构产生磨损。另外,在月球车行驶时,从车轮下喷溅出来的尘埃数量巨大,高度超过2米,对航天员执行巡视任务产生了一定影响。

美国阿波罗16号航天员在地球上练习驾驶月球车。
道路曲折
人类发展月球车或月球着陆器或月球采样返回探测器经历了许多坎坷。例如,1963年4月2日,前苏联发射的月球4号从距月球约8500千米处飞过,软着陆失败;1965年5月9日发射的月球5号于5月12日撞击月面,软着陆失败;1965年6月8日发射的月球6号从距月球约10万千米处飞过,软着陆失败;1965年10月4日发射的月球7号于10月7日撞击月面,软着陆失败;1965年12月3日发射的月球8号于12月6日撞击月面,软着陆失败;1969年7月13日发射的月球15号于7月21日坠毁于危海,未取回样品;1971年9月2日发射的月球18号于9月11日着陆于丰富海附近,月球车因地面不平发生翻滚;1974年10月28日发射的月球23号于11月6日于危海南部着陆,钻机损坏,未送回样品。
美国探月也不是一帆风顺。例如,美国1962年4月23日发射徘徊者4号于4月26日落在月球背面,指令系统失灵;1964年1月30日发射的徘徊者6号,2月2日坠毁于静海地区,电视系统失灵;1966年9月20日发射的勘测者2号于9月23日坠毁于哥白尼月坑附近,控制系统失效;1967年7月14日发射的勘测者4号于7月17日在中央湾着陆前,无线电联系中断。
至今,国外只有前苏联成功发射、运行了月球车1号、2号两辆无人月球探测车,其中月球车1号在月面工作了10个月,而月球车2号由于中途出现故障只工作了4个月。月球车2号在地面操控下驶入一个撞击坑考察岩石时,由于轮子在疏松凹陷的月壤中空转,在倒车时坑壁的月壤撞落到月球车太阳电池板和散热器表面,导致供电骤减,车内过热,数日后月球车与地面彻底失去联系。
20世纪90年代至今也出现过探月故障。1990年1月,日本发射的飞天号月球轨道器在接近月球后与地面失去联系,未获得探测成果。2008年10月,印度的月船1号绕月探测器,其设计寿命为2年,但月船1号因故障,只在轨工作312天就与地面失去联系。从对国外月球探测器故障统计与分析来看,在探测器各分系统中,载荷、通信、电源、推进、控制5个分系统容易发生故障。

阿波罗15号航天员詹姆斯·欧文(James Irwin)准备驾驶历史上第一辆载人月球车。
环境恶劣
月球车易出现故障,其主要原因有:一是月球离地球较远,这就给发射、测控、入轨、着陆、返回等带来很多困难;二是月面环境十分恶劣,甚至比火星环境更复杂,它主要表现在大温差、长月夜、强辐射、高真空、弱重力、无磁场、坑很多、月尘多、月壤细、很松软等,这些中的任何一项都会对月球车产生影响,有的甚至很大,足以致命。
例如,从月表的路况上看,太阳紫外线辐射的影响,月壤细粒会周期性地升起,月球重力是地球的1/6,月球车行走时更容易带起大量月壤细粒,形成月尘。月尘可能进入甚至覆盖月球车所载仪器设备,一旦附着很难清除。月尘可能引起月球车很多故障,包括机械结构卡死、密封机构失效、光学系统灵敏度下降等。月球表面尘埃带电,会给太阳电池、光学器件等带来不利影响。月面覆盖着厚度不等的月壤层,并存在大小不等的月坑和岩石,其物理力学特性和月表地形都与月球车移动性能直接相关。
因为缺乏大气,月球车将完全暴露在多种宇宙射线下,强烈的电磁辐射可能破坏电子遥控系统,这对接收系统的最大接收功率提出了相当高的要求。月球每天都会直接面对超新星与太阳风暴等大量宇宙射线,而当宇宙射线击中月球表面时,会引发微型的核反应,其结果就是月球表面也产生大批危险的次级辐射。另外,月球表面崎岖不平,石块、陨石坑遍布,而土壤非常松软,这都会降低月球车的行进效率。而低重力导致的摩擦系数降低,使得在月球上行走远比地球上容易打滑,这对月球车的控制系统提出了更高的要求。
还有,月球的一天约相当于地球的28天,而且14天是阳光普照的白天,14天是寒冷的黑夜。在月球上,受光部位的极限温度可达150℃,未受光部位的温度则为-130℃~-60℃,而到了夜间,温度会降到-180℃,有些地区甚至低至-200℃。所以长达十多个地球日的漫长月夜、超过300℃的昼夜温差是月球车的“健康杀手”,必须采用有效的保温措施,使舱内温度控制在-50℃~50℃范围内,否则设备会损坏。
月球车进行巡视探测的一大难点就是上天前在地面试验验证难,而且人类对月球复杂环境了解有限,所以在实际探测中还会遇到很大风险、很大挑战。

美国航天员尤金·塞尔南驾驶着阿波罗17号的月球车。
未来前景

美国测试一款拥有全新电池系统的小型月球车,原计划于在2020年重返月球中投入使用,现在不了了之。
由此可见,用月球车进行探测是一项非常复杂并具高风险的工程,在探月过程中出现异常在所难免。任何一项复杂的科研工作都是波浪式前进的,太空探索更是如此,因为人类对月球和其他地外星球知之甚少,而且距离遥远,探测它们必须冒很大风险,经历各种考验,排除各种困难,才能有所收获,然而这也正是太空探索的魅力所在。所以,人类还在研究新型月球车。
月球车还可采用腿式和履带式等,但由于轮式月球车具有运动速度快的优点,效率最高,所以国外已发射的5个月球车都为轮式。腿式月球车的适应能力最强,但其效率最低,控制起来比较复杂,弄不好一下子就坐到地上;履带式最大的优点是压强小、通过性强,但它的弱点是遇到石块等容易被卡住不能动弹。与腿式和履带式月球车相比,虽然轮式月球车越野性能不太强,适应能力差,但随着月球车逐渐采用6轮摇臂+转向架式悬挂系统底盘结构,使轮式月球车的越野能力大大增强,能与腿式月球机器人相媲美。
不过,结合腿式和轮式漫游车各自的优点,一些国家开始研制轮腿式月球车。它融合了腿式的地形适应能力强和轮式高速高效的优点,作业范围大,同时具有优越的越障避障能力,对复杂月球表面环境适应性强,但缺点是结构与控制更复杂。
未来的月球车将朝着在月面工作更长的时间、行驶更长的距离、适应更复杂的环境等方面发展,并具有质量和尺寸最小化、有效地利用和传输能源、机动能力更强、航天员安全更高、应用范围更广、成本更低等特点。为此,需采用模块化设计和国际合作,以满足多种需求。
(责任编辑 张恩红)
猜你喜欢
军事文摘(2022年18期)2022-10-14
小哥白尼(趣味科学)(2022年6期)2022-08-17
军民两用技术与产品(2021年10期)2021-03-16
青少年科技博览(中学版)(2021年11期)2021-03-07
北京航空航天大学学报(2020年10期)2020-11-14
制造技术与机床(2018年8期)2018-10-09
中国军转民(2018年1期)2018-06-08
太空探索(2015年1期)2015-07-18
太空探索(2014年12期)2014-07-12
太空探索(2014年11期)2014-07-12
