
机动弹头攻防视景仿真系统研究
2014-04-19 06:00郭鸿武
导航定位与授时 2014年1期
王 鹏,吕 鸣,郭鸿武,韩 阳,周 彬
(国防科学技术大学 机电工程与自动化学院,湖南 长沙 410073)
机动弹头攻防视景仿真系统研究
王 鹏,吕 鸣,郭鸿武,韩 阳,周 彬
(国防科学技术大学 机电工程与自动化学院,湖南 长沙 410073)
通过建立机动弹头大气层外动力学模型,利用Vega、Creator视景开发软件建立三维实体模型,在VC/MFC开发平台基础上,解决Simulink仿真模块与视景仿真模块数据交互问题。构建三台计算机联合仿真平台,真实模拟机动弹头攻防对抗过程,并设计开发了弹道导弹中段攻防对抗视景仿真系统。主要包括机动弹头动力学模型构建和弹道数据产生,数据通信交互程序设计,视景仿真程序设计和动态显示。
Vega;视景仿真 ;机动弹头;动态显示
0 引言
视景仿真又称为虚拟现实仿真,它是计算机技术、图形图像技术、光学技术、控制技术等多种高科技的结合。视景仿真技术是现代仿真技术的一个重要分支, 是虚拟现实技术、分布式交互仿真技术研究的主要内容之一, 它利用计算机图形图像技术, 根据仿真的目的, 构造仿真对象的三维模型或再现真实的环境, 能够实现传统仿真技术所无法实现的逼真的仿真特效[1]。
随着科学技术的发展,武器装备的日益复杂化。视景仿真被越来越多的运用到军事领域,并在武器装备的研究和论证、计算机模拟的军事训练和对抗中发挥重要作用[2]。现代战争中,导弹往往被用于打击敌方纵深目标,形成战略威慑,已经成为现代战争中不可或缺的重要武器。利用视景仿真技术对导弹的飞行过程进行动态显示不仅具有良好的安全性、可控性,重复性和保密性等优点,而又有利于缩短研制和试验周期,提高武器的性能指标,节约研制经费,具有重要意义。
本文采用视景仿真软件Creator和Vega,Matlab仿真模块Simulink,结合VC++6.0/MFC,建立模型对象,构建三机联合仿真平台,分别模拟进攻弹、拦截弹、导引头与进行视景开发显示,利用网络通信解决数据交互问题,对机动弹头在大气层外攻防对抗状态进行动态显示。
1 机动弹头模型
为增强仿真的可信度,在机动弹头攻防视景仿真系统中需要提供机动弹头飞行过程的实时位置姿态信息以及运行状况,然后利用视景仿真工具进行实时动态显示和渲染。要生成机动弹头飞行过程弹道数据,关键问题就是建立机动弹头运动的动力学模型,然后利用Simulink仿真,得到飞行过程六自由度数据。
本文研究的是大气层外机动攻防对抗视景仿真,所以在建立机动弹头动力学模型时不用考虑气动作用及力矩的影响,同时由于进攻弹和拦截弹相对速度较大,突防的时间较短,所以不考虑地球自转和地球偏率的影响,假设为水平坐标系,并且固化进攻弹和拦截弹参数。
根据牛顿第二定律,建立突防弹质心运动的动力学方程为:
(1)
式中,Vm为突防弹的速度,m为突防弹的质量,θ,ψc,γc分别为突防弹的弹道倾角、弹道偏角和速度倾斜角,α和β分别为突防弹的攻角和侧滑角。弹道导弹在大气层外飞行时没有空气动力,只受地球引力G和发动机推力Tx,Ty,Tz的影响。
突防弹质心旋转的动力学方程为:
(2)
式中,Jx,Jy,Jz分别为突防弹绕三个弹体轴的转动惯量,ωx,ωy,ωz分别为突防弹旋转角速度矢量在弹体坐标系各轴上的分量,Mx,My,Mz分别为作用于突防弹上的所有外力对质心的力矩在弹体坐标系各轴上的力矩分量。
研究突防弹的运动规律时,一般是相对地面坐标系来说的,以地面坐标系为基准,利用速度坐标系和地面坐标系之间的夹角余弦关系,即可得质心移动的运动学方程:
(3)
突防弹的弹体坐标系和地面坐标系之间的方向余弦关系求得绕质心转动的运动学方程:
(4)
拦截弹的模型与突防弹是一样的,本文不再赘述。设突防弹和拦截弹的相对距离为R,目标视线高低角为qy,目标视线方位角为qz,弹道突防导弹的参数用下标“m”表示,拦截器的参数用下标“E”表示。可得目标和拦截器的相对运动方程:
(5)
利用Simulink仿真模块建立弹头模型,输入初始条件后开始仿真得到机动弹头攻防弹道轨迹,Simulink仿真结构图如下所示

图1 仿真框架图Fig.1 Simulation framework map
由于本文中视景仿真系统是在VC/MFC平台基础上开发的,为了方便的获取弹道数据和利用网络进行数据交互传输,将Simulink仿真模块转化成C语言程序,利用socket解决Simulink仿真模块与视景仿真模块数据交互和通信的问题。
2 数据交互程序设计
2.1 三机联合仿真结构图
机动弹头对抗仿真涉及到攻防双方的程序与数据接口问题,为了真实模拟对抗过程,构建了三台计算机联合仿真平台[1],通过局域网实现数据传输,仿真平台如图2所示,
2.2 数据交换程序关键点分析
2.2.1SOCKET使用流程
本文中数据交互程序是借助VC/MFC开发平台,利用Socket自己编写数据传输接口实现三台计算机在局域网中的数据通信,其传输方式简单,实时性较强。
在MFC中,CSocket的使用流程是:
1) 从CSocket中派生一个类。
2) 重载CUDPSock类的数据接收函数。当接收到网络数据包后,系统会自动调用该函数,因此在该函数中进行相应处理。
3) 生成CUDPSock类的对象,然后调用对象的初始化函数,完成后即自动开始接收网络数据包。
4) 当要发送数据时,调用对象的SendTo()函数。
2.2.2 循环缓冲区的使用
循环缓冲区也就是生成两个或多个缓冲区。在保存数据(即写入缓冲区)时,数据保存到第一个缓冲区,下次要保存数据时,则保存到第二个缓冲区中,依次类推。当写入最后一个缓冲区后,下次保存数据时则循环到第一个缓冲区,因此叫做循环缓冲区。而读取数据时,也是顺序读写缓冲区。
这样的好处是:可以将数据的写入和读取之间进行一定的分隔。若不使用循环缓冲区,当正在读取数据时,可能正好有新的数据要保存,这样就会造成冲突,数据混乱。
2.2.3 网络数据包格式和数据记录
在本例中,需要定时发送网络数据包,发送的网络数据包先经过打包,然后调用SendTo( )函数向目的地址发送,数据打包函数可通过自定义函数实现,主要功能是按照网络数据包格式组成数据包。网络数据包由网络帧头加上数据组成,其中网络帧头格式根据需要自定义结构体。
数据的记录采用线程方式实现。采用线程可以使得记录工作和其它功能实现并行。
数据记录的处理流程是:
1)初始化CUDPSock对象时,启动线程;
2)接收数据,触发事件;
3)响应事件,把接收到的每包数据写到文件中。
记录的文件格式是:每帧数据加上一个记录帧头,顺序保存到文件中。记录帧头的格式根据需要自定义结构体。图示如图3。
3 视景仿真系统设计
在视景仿真系统中,为达到较为逼真的动态画面,需要建立较为精确地模型对象和复杂的三维场景模型。在本例中,综合利用了MultiGen-Paradigm公司开发的Creator和Vega图形仿真工具能够方便,准确的建立模型对象,进行实时视景仿真。同时借助VC/MFC开发平台,进行视景仿真程序设计。

图 3 数据格式Fig.3 Data format
3.1 机动弹头攻防对抗视景仿真框架设计
在导弹飞行中段,由于飞行环境处于大气层外,所以不会受大气环境、天气状况、地理环境的影响,其动力学模型也不用考虑气动作用的影响。为了逼真的仿真导弹在大气层外运动状态,采用Simulink实时仿真数据作为弹道飞行的轨道和姿态数据,同时使用Creator建立准确的导弹模型对象,逼真的星空背景和大气层外环境模型。选用VC++6.0作为开发平台,Vega视景仿真软件
作为视景驱动,完成模型和场景的动态显示与渲染。由以上分析可知:整个仿真系统主要分为四个部分:三维模型对象和场景的建立,模型对象数学模型的建立和数据生成,LynX图形界面设计、场景驱动程序设计,基本框图如图4所示。

图 4 弹道导弹中段突防视景仿真系统框架图Fig.4 Anti-Ballistic Missile sudden interruption visual simulation system framework map
其中,数据生成部分由进攻弹和拦截弹仿真计算机分别完成,三维模型建立和LynX图形界面设计在场景驱动程序设计前完成。
3.2 三维实体模型建立
视景仿真过程中三维实体模型需要在仿真启动之前建立,其逼真度直接关系到仿真效果。Creator是一套高逼真度、最优的实时三维建模工具,利用它可以方便的创建复杂的三维实体模型,将这些文件导入到Vega的运行软件中就可以产生逼真的仿真效果[4]。
弹道导弹在中段飞行过程中由于弹体一、二级已经分离,所以在视景仿真中只需建立弹头三维实体模型。根据弹头几何模型,综合运用贴图、填充、光照、纹理等多种手段,建立立体感强,逼真度高的弹头模型。弹头由于是在大气层外绕地球飞行,为获取较好的视觉效果,建立地球三维实体模型和相应的星空背景。建立的三维实体模型如图5、图6所示:

图5 弹头三维模型图Fig.5 The 3D model of warhead

图6 地球三维模型图Fig.6 Earth’s three-dimensional model diagram
4 仿真结果显示
完成三维实体建模和相关驱动程序的编写后,运行MFC程序,加载ADF文件,设置好通信地址及端口号,由服务器接收甲、乙仿真计算机的弹道数据后,在服务器上实时的显示三维仿真场景,直观的反映导弹突防的工作过程。
图7为进攻弹和拦截弹在突防前在大气层外的飞行状态,左右两边的导弹三维实体模型分别为进攻弹和拦截弹,左下角和右下角的两个通道使用Tether-Fixed定位方式分别观察进攻弹和拦截弹的运行过程,红色曲线表示导弹运行轨迹。图8为进攻弹成功进行突防后的状态。
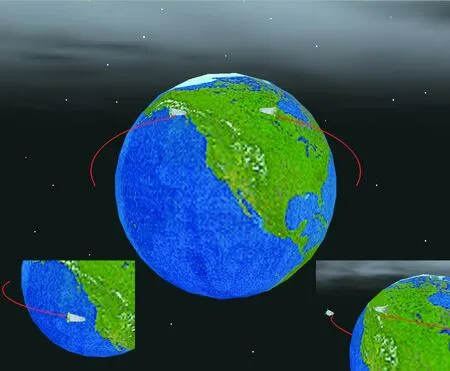
图7 导弹大气层外飞行状态Fig.7 Missiles outside the atmosphere flight status

图8 导弹突防过程Fig.8 Missile penetration process
5 结论
通过局域网实现数据传输,仿真平台如图所示,随着计算机技术和图像图形处理技术的发展,视景仿真技术将会被越来越多的运用到各个领域。本文以机动弹头自由段攻防对抗的飞行过程为例,构建三台机联合仿真平台,编写了基于MFC的Vega应用程序,开发了相应的实时视景仿真系统。本仿真系统运用了路径生成、特效使用、碰撞检测、通道和视点设置等相关方面的知识。程序经过运行测试表明,视景仿真画面连续逼真,可实时模拟出机动弹头自由段攻防对抗的过程,具有较高的可信度,基本达到了预期效果,对同类视景仿真系统的开发具有一定的参考价值。
[1] 陈新庚.马长生.孙文涛. 基于Vega的导弹防御仿真系统研究[J]. 计算机仿真,2011,28(1):59-61.[ChenXingengMaChangshengSunWentao.ResearchofSimulationMissileDefenseSystemBasedonVega[J].ComputerSimulation,2011,28 (1) :59-61. ]
[2] 陈新庚 马长生 孙文涛. 基于Vega的导弹飞行视景仿真[J]. 沈阳航空学报,2010,27(2):20-23.[ChenXingergMaChangshengSunwentao.Missileflightvisualsimulationbasedonvega[J].ShenyangInstituteofAeronauticalTechnology, 2010,27 (2) :20-23. ]
[3] 陶鹏 刘怀勋 高宏峰.空面导弹飞行视景仿真系统研究[J].微型机与应用,2009, (22):40-43.[TaoPengLiuHuaixunGaoHongfeng.Researchofmissileflightvisualsimulation[J].MicrocomputersandApplications, 2009, (22) :40-43. ]
[4] 王乘.Creator可视化仿真建模技术[M]. 武汉:华中科技大学出版社,2005. [WangCheng.Creatorvisualsimulationmodelingtechnology[M].Wuhan:HuazhongUniversityofScienceandTechnologyPress, 2005. ]
[5] 王乘 李利军.Vega实时三维视景仿真技术[M]. 武汉:华中科技大学出版社,2004. [WangChengLiLijun.Vegareal-timethree-dimensionalvisualsimulationtechnology[M].Wuhan:HuazhongUniversityofScienceandTechnologyPress, 2004. ]
[6] 赵秀娜. 机动弹头的智能规避策略研究[D].长沙:国防科学技术大学,2006[ZhaoXiuna.intelligentmaneuveringwarheadavoidancestrategyof[D].Changsha:NationalUniversityofDefenseTechnology, 2006. ]
Research on Combat Visualization Simulation System of Maneuvering Warhead
WANG Peng, LV Ming, GUO Hong-wu, HAN Yang, ZHOU Bin
(Mechatronic Engineering and Automation School of National University of Defense Technology,Changsha 410073,China)
The exoatmospheric kinetic model of maneuvering warhead is built, and three-dimensional solid model is built using the Vega and Creator visual development software. The problem of data exchange between simulink simulation module and visualization module is solved based on VC/MFC development platform. The co-simulation platform of three computers is built, and the platform can simulate the combat progress of maneuvering warhead. The missile attack and defense visualization simulation system is developped, which includes kinetic model of maneuvering warhead and trajectory data generation, the design of data communications interactive program, the design of visualization simulation program and dynamic display.
Vega; Visual simulation; Maneuvering warhead; Dynamic display
2014-05-10;
2014-06-18。
航天技术支撑基金(编号:2012-HT-GFKD)
王鹏(1987-),男,硕士研究生,主要从事精确制导与控制方面的研究。 E-mail: wangpeng_nudt@126.com。
TP271
A
2095-8110(2014)01-0075-06
猜你喜欢
齐齐哈尔大学学报(自然科学版)(2021年3期)2021-04-19
科教导刊·电子版(2020年24期)2020-10-21
火力与指挥控制(2020年2期)2020-04-02
计算机与数字工程(2018年12期)2019-01-02
计算机测量与控制(2018年7期)2018-07-27
计算机系统应用(2018年3期)2018-04-21
舰船科学技术(2015年8期)2015-02-27
时代人物(2014年10期)2015-01-28
环球时报(2012-01-12)2012-01-12
航空知识(2001年4期)2001-06-07

- 导航定位与授时的其它文章
- 导航、定位与授时技术综述
- 惯导系统误差自补偿技术发展综述