结构参数对磁力平衡头自锁和启动力矩的影响研究
2014-05-25 00:34樊红卫景敏卿王仁超辛文辉
振动与冲击 2014年3期
樊红卫,景敏卿,王仁超,刘 恒,辛文辉
(1.西安交通大学机械工程学院,西安 710049;2.西安理工大学机械与精密仪器工程学院,西安 710048)
结构参数对磁力平衡头自锁和启动力矩的影响研究
樊红卫1,景敏卿1,王仁超1,刘 恒1,辛文辉2
(1.西安交通大学机械工程学院,西安 710049;2.西安理工大学机械与精密仪器工程学院,西安 710048)
为了简化平衡头的自锁结构,提出一种磁路自锁型电磁-永磁混合式平衡头。当线圈不通电时,依靠相邻两个永磁体与磁性内齿盘之间的磁阻最小,平衡头锁定在稳定位置。当线圈通电后,在电磁场和永磁体作用下,平衡头启动并向下一稳定位置运动。讨论了影响平衡头自锁力矩和启动力矩的结构参数,并对各个参数的取值范围进行了初步设计。通过有限元电磁分析,得到了其与自锁力矩、启动力矩之间的量化关系。基于此,设计并开发了一套电磁平衡头样机,完成了其自锁可靠性计算和启动能力试验。对比计算和试验结果,平衡头结构设计和参数选取正确。研究工作为该平衡头的工程应用提供了重要的参考价值。
结构参数;磁平衡头;自锁力矩;启动力矩
在线自动动平衡是近几十年发展起来的一项新的转子动平衡技术,它解决了现场动平衡试重次数多、平衡效率低的问题,因此受到国内外同行学者的青睐。平衡头是在线自动动平衡的执行机构,也是其核心技术所在。因此,研究平衡头的结构设计和基本性能具有重要的工程价值。
平衡头的基本工作原理是通过一套自动化配重机构来取代人工增/减重,进而实现对轴系质量分布不均的主动校正。查阅国内外相关文献可知,目前最为常见的自动平衡头主要有机械式、液压式和电磁式三种[1]。其中,机械式平衡头[2-4]通过一个微特电机驱动一个带有校正质量的齿圈实现动平衡,其平衡状态的保持通过机械自锁的方式,因此存在冲击、且零件数目较多,平衡精度和转速受到一定限制。液压式平衡头[5-6]利用一套液压系统并通过喷嘴向装在轴上的圆盘的空腔中喷射水或油等液态介质以实现质量配平,其平衡状态在停机后无法保持,在连续多次平衡时平衡效率低,且系统布置不紧凑、存在现场污染等。电磁式平衡头[7-10]通过线圈通电产生电磁场来驱动配重转子转动,进而实现动平衡,其平衡状态保持可通过外加离合器[7-8]或磁路的巧妙设计[9-10]实现,具有非接触、无污染等优点,理论上能够用于较高转速。其中,通过磁路的高度集成设计来实现平衡状态保持的平衡头结构简单、零件数目少、轴向尺寸小,因此极具工程应用价值。但是,这种平衡头安装在轴上而非轴端,因此一般需要根据实际应用工况和安装空间等进行自主设计和开发。
本文研究一种依靠永磁体实现配重盘自锁的电磁——永磁混合型平衡头的具体结构设计。重点研究平衡头设计参数对自锁力矩和启动力矩的影响规律,进而结合实验来评价平衡头样机的自锁可靠性和启动可行性,为该类平衡头的实际应用奠定基础。
1 依靠磁路设计实现配重盘自锁的平衡头结构
电磁平衡头由定子和转子组成,定子由线圈和铁芯组成,转子由配重盘和磁性盘等组成。在平衡头转子中,配重盘是携带偏心质量的金属圆盘,可采用不锈钢、钛合金或铝合金等不导磁材料制成,通过在其上某圆弧段上打孔或打孔后在孔内镶嵌铜、铅等重金属来获得想要的配重量(质量乘以其所在的半径),本文所设计的配重盘结构如图1所示。图1中,配重盘上镶嵌了10对圆柱形永磁体,每个永磁体沿其轴向充磁并在外表面镀锌,每相邻两个永磁体极性相反。配重盘转动时,需要在线圈两端施加一个“正负交替变换的方波电压”,此时,配重盘像步进电机一样“按步”转动;当配重盘转至平衡位置后,线圈收到来自控制器的信号而断电,此时配重盘停转并在永磁体的磁力作用下维持当前的平衡状态。图2所示为位于配重盘两侧的铁磁性内齿盘的具体结构,其齿厚等于相邻两永磁体的中心距,齿数等于永磁体的对数,驱动时磁性盘的内齿将被轴向磁化。本文所提出的平衡头的自锁磁路就是依次由磁性盘、中间配重盘和磁性盘组成,它是一个具有双气隙的轴向磁场,这三个元件也是该平衡头转子的“最小单元”。
在以上最小单元基础上,在磁性盘两侧增加端盖并将所有元件集成到一个支座上即构成平衡头转子的完整结构。装配好的平衡头转子直接安装到高速旋转的轴上。因此,平衡头需要抵抗轴的加速对自锁的影响;而平衡头结构本身的合理性以及启动的难易程度也是衡量该平衡头设计好坏的重要指标。
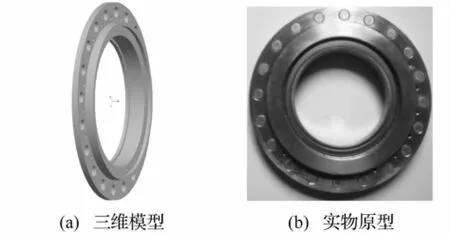
图1 配重盘结构设计与实现Fig.1 3D structure and of counterweight plate
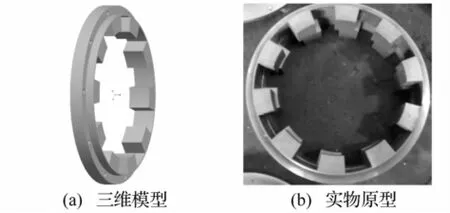
图2 磁性盘结构设计与实现Fig.2 3D structure and prototype ofmagnetic plate
2 平衡头自锁与启动磁路及影响磁力矩的结构参数
图3所示是由“带两个相邻永磁体的配重盘和其左右两侧的磁性内齿盘”所组成的简化的最小单元的自锁磁力线和启动磁力线,Fs是启动力。
在图3基础上,进一步地,包含平衡头定子的完整启动磁路如图4(a)所示。设配重盘与两侧磁性盘之间的气隙为g(mm),定子铁芯与转子磁性盘之间的气隙为δ(mm)。其中,定子中的铝环是为调整磁路的磁阻以减少漏磁而设,转子中的不锈钢圆环是为阻止磁感线从永磁体径向穿入而设。图4(b)是线圈的实际结构,它是一个扁平状的单相圆环结构,经绕线、脱模、浸漆、烘干、包覆绝缘层等工艺环节制成。
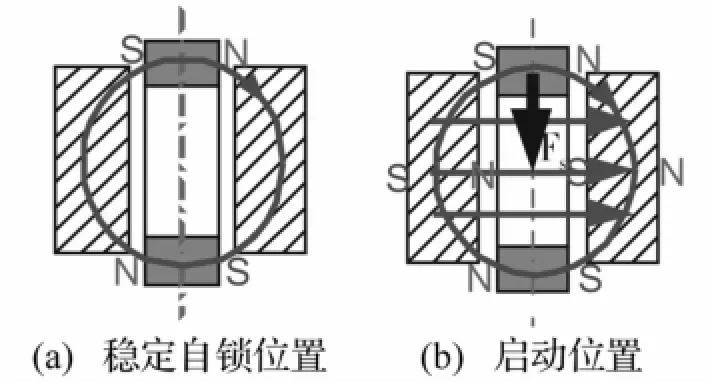
图3 配重盘自锁与启动位置的磁力线Fig.3 Magnetic flux line of self-locking and starting for the balancer's counterweight plate
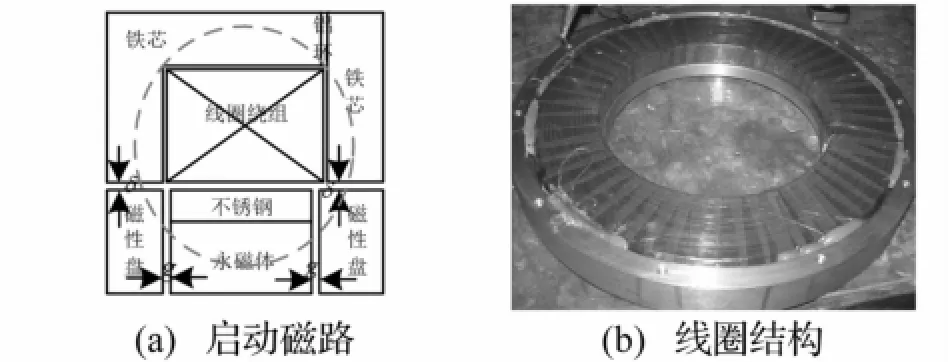
图4 配重盘启动磁路与线圈实物Fig.4 Startingmagnetic circuit and coil prototype
根据该平衡头的结构和磁路特点,影响其自锁特性的主要因素有永磁体磁特性和长径比(长度与直径之比)、永磁体与磁性盘之间的气隙大小、铁磁材料的磁特性以及磁性盘的厚度。其中,永磁体磁特性和长径比、永磁体与磁性盘之间气隙大小的影响是主要的。对于启动特性而言,影响因素还有线圈总电流(单匝电流乘以匝数,又称安匝数)和平衡头定转子之间的气隙大小。其中,线圈总电流对启动力矩影响很大,是最容易调控的参数。
为了便于量化结构参数与自锁力矩、启动力矩之间的关系进而得到平衡头的静态设计规律,其主要参数的初步设计结果如表1所示。
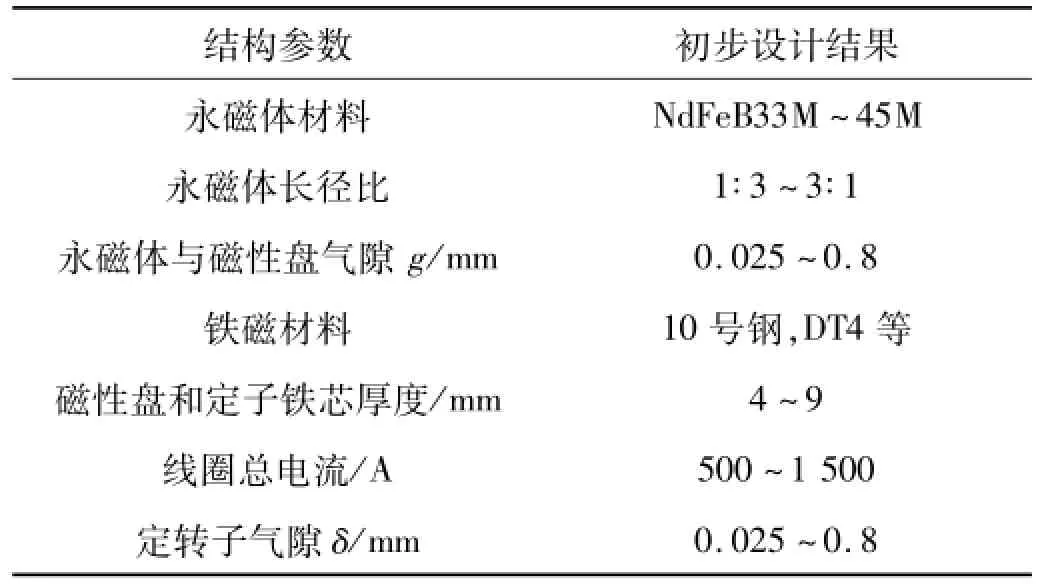
表1 平衡头结构参数初步设计结果Tab.1 Initial results of balancer structure parameter design
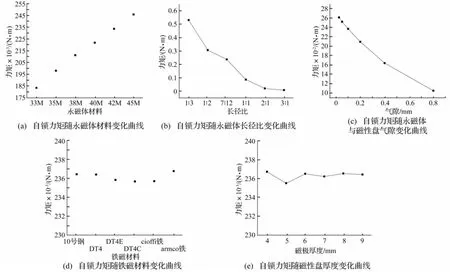
图5 自锁力矩随各结构参数变化曲线Fig.5 Self-locking torque curve with structure parameters
3 结构参数对自锁力矩的影响研究
根据电磁场的MAXWELL方程组,采用ANSOFT MAXWELL-3D平台完成该平衡头的电磁场静态分析,分析中的基本假设为:①考虑到平衡头的结构对称性,只针对1/20模型进行分析,②永磁体和铁磁材料的磁化曲线按线性处理,只给出永磁体的矫顽力、剩磁以及铁磁材料的相对磁导率,③永磁激励以材料属性形式施加,电磁激励采用面电流方式按总安匝数施加,④建立完全包围平衡头模型的扇形实体,并赋以空气属性,作为计算边界来考虑漏磁等,⑤求解对象为一对相邻永磁体,自锁力矩为二者计算结果的绝对值的平均值,启动力矩为二者计算结果直接求和,⑥每次计算都只改变一个参数。
图5为自锁力矩的计算结果,这里激励只有永磁体。
根据NdFeB-M系列6种常用永磁体的计算结果知,自锁力矩随永磁体磁特性(指剩磁和矫顽力)的提高呈近似线性增大即高矫顽力有利于提高自锁力矩,为了能用较小体积获得足够大的自锁力矩,选择40M、42M或45M均可;在[1∶3,3∶1]范围内,自锁力矩随永磁体长径比的增大呈非线性减小即扁平状永磁体有利于提高自锁力矩,为保证足够大的自锁力矩同时考虑加工和安装难度,取1∶2左右较好;在[0.025mm,0.8mm]范围内,自锁力矩随永磁体和磁性盘之间气隙的增大呈弱非线性减小即小气隙有利于提高自锁力矩,为保证足够大的自锁力矩同时考虑加工和装配难度,取[0.05mm,0.2mm]较好;根据6种常用铁磁材料的分析结果知,铁磁材料的磁特性(指磁导率)对自锁力矩影响很小,需结合磁场分布尽量选择高强度材料;在[4 mm,9mm]范围内,磁极(指磁性盘)厚度对自锁力矩影响很小,需结合磁场分布尽量选择较小磁极厚度以减小平衡头转子轴向尺寸。
4 结构参数对启动力矩的影响研究
对线圈施加恒定电流激励,采用和自锁力矩同样的方法求解一对永磁体的启动力矩。由于永磁体材料属性、长径比以及永磁体和磁性盘之间气隙3项参数对自锁力矩和启动力矩的影响规律类似,故以下只给出如图6所示其他4项参数的计算结果。
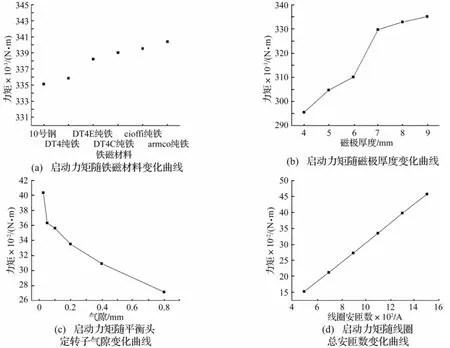
图6 启动力矩随各结构参数变化曲线Fig.6 Starting torque curve with structure parameters
与自锁力矩的分析不同,启动力矩计算中,铁磁材料被线圈的电磁场磁化后变成磁体,因而铁磁体的磁参数和厚度对启动力矩的影响与自锁力矩有所不同。不过,磁性盘和定子铁芯材料的磁特性(指磁导率)对启动力矩影响同样很小,需结合磁场分布确定,尽可能选择高强度材料;在[4mm,9mm]范围内,启动力矩随磁极厚度增大呈非线性增大即磁极越厚越有利于提高启动力矩,但在[6mm,7mm]范围内变化较为急剧,在保证足够大的启动力矩条件下为尽可能缩小平衡头转子轴向尺寸,取7mm左右较好。
此外,在[0.025 mm,0.8 mm]范围内,启动力矩随动静环之间气隙的增大呈非线性减小即小气隙有利于提高启动力矩且在[0.025 mm,0.05 mm]范围内变化较为急剧,为保证足够的启动力矩且考虑到加工装配难度,取[0.1mm,0.4mm]较好;在[500 A,1500 A]范围内,启动力矩随线圈安匝数增大呈线性增大即较大的安匝数有利于提高启动力矩,为保证在足够的启动力矩作用下快速而稳定地启动且尽可能节能,可考虑选择[1000 A,1200 A]。
在上述自锁力矩和启动力矩的计算中,均涉及到用磁场分布确定磁极厚度的问题。为此,对磁性盘和定子铁芯均为7mm的情况,利用MAXWELL-3D计算得到了如图7所示的磁场分布结果。
根据图7,磁性盘的最大自锁磁通密度大约为1.1T;对于启动磁通密度,定子铁芯小于磁性盘,磁性盘最大磁通密度大约为1.4T,启动磁场分布规则、无大的漏磁。故磁极厚度选取7mm是可行的。
5 自锁可靠性与启动能力试验
为了验证上述计算结果的正确性,采用不锈钢作配重盘,并在其上镶嵌长径比为7∶12的NdFeB-40M永磁体,设磁性盘与配重盘气隙为0.1mm,磁性盘用优质10号钢。由于启动试验需要通入一个较大范围的电流进行驱动测试,故为防止饱和而取磁极厚度为9mm。
按以上参数制造的平衡头转子实物如图8所示,这里为了清楚地看到磁性盘和配重盘的位置关系,未安装端盖。
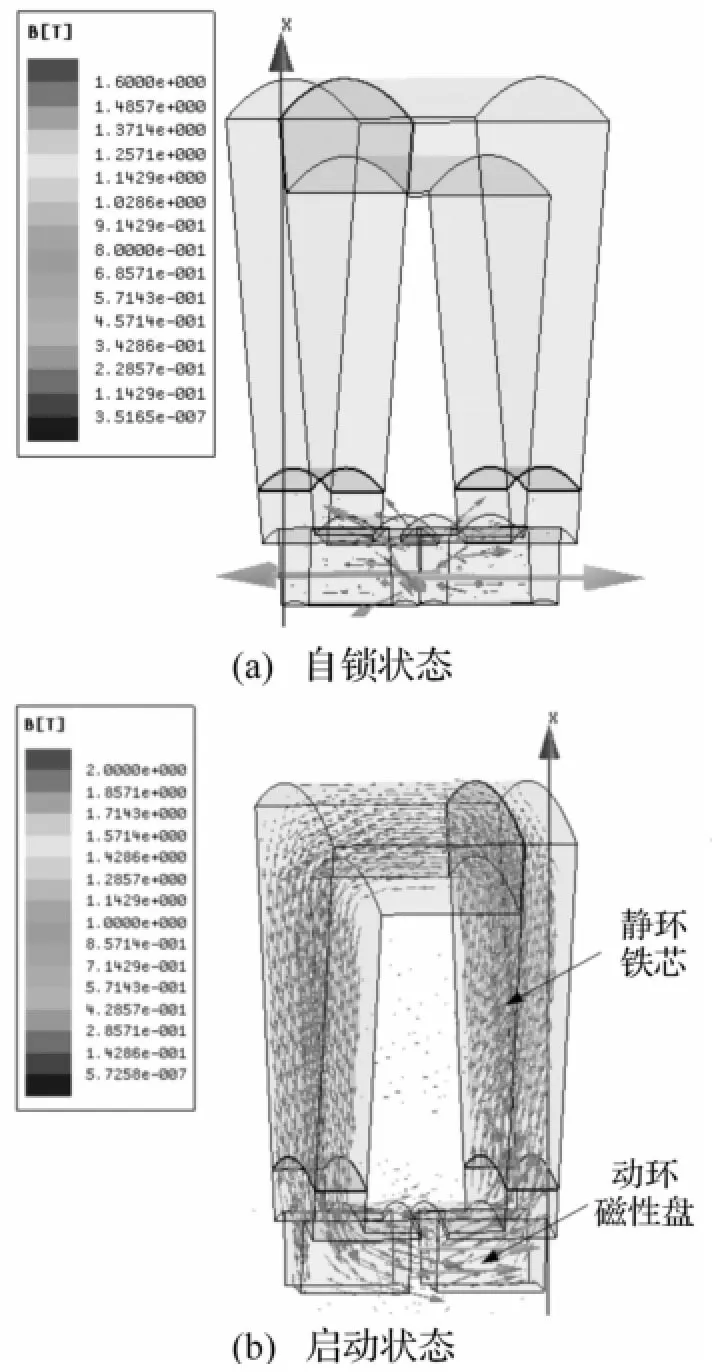
图7 自锁与启动磁密矢量图Fig.7 Flux density vector diagram of self-locking and starting conditions
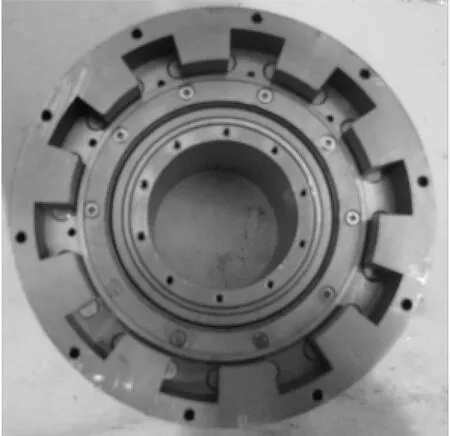
图8 平衡头转子实物Fig.8 Prototype of the balancer's rotor
针对图8的平衡头转子原型,经计算得知,配重盘总的自锁力矩为0.236 43 N·m/对×10对=2.364 3 N·m,其转动惯量则对不同的配重方式不同。图9是15种结构下配重盘所能承受的最大轴角加速度,经计算,其取值范围为4 841 rad/s2~12 836 rad/s2,即相当于771r/s2~2 044 r/s2,这对于一般旋转机械的启动升速是够用的。
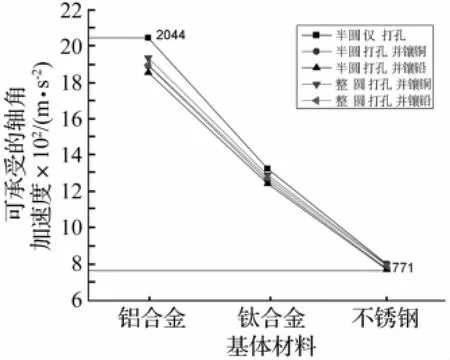
图9 配重盘所能承受的最大轴角加速度Fig.9 Maximal angular acceleration accepted by the counterweight plate
为了从实验角度检查平衡头样机的自锁可靠性和启动能力,搭建了如图10所示的试验平台,包括平衡头及其支撑系统以及平衡头的驱动电路。其中,驱动线圈采用线径为1.12 mm的漆包圆铜线绕制324匝得到。
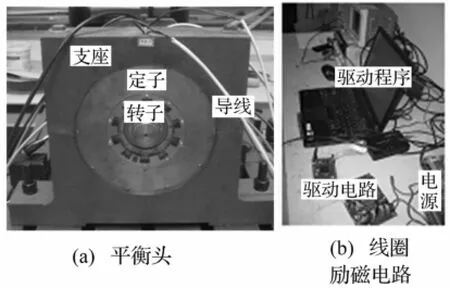
图10 自锁与驱动能力试验平台Fig.10 Experimental platform of verifying self-locking and starting ability
在图10(a)中,平衡头定子通过一个轴承座支撑,转子安装在一根阶梯轴上,轴通过柔性联轴器与变频电机连接。自锁可靠性评价是在定子线圈不通电情况下将电机在3~4s内升速至2 000 r/min~3 000 r/min,转速调节通过变频器实现。试验时,先在配重盘和磁性盘上用记号笔做好初始位置标记,然后控制变频器升速,之后停机观察启动前和停转后配重盘是否发生转动。经多次启停测试,证明所开发的平衡头的配重盘在加速试验期间未发生滑移,自锁是可靠的。
启动能力验证试验的过程如下:首先,为防止配重盘因支撑轴承的游隙过大导致配重盘摆动进而与磁性盘摩擦,将动静环单边间隙调整为0.2mm;然后,在轴不转动的情况下,对线圈逐渐通入1 A~4 A的递增电流,观察其运动状态。试验结果是:当电流小于3A时,平衡头基本静止不动;当电流约为3 A时,平衡头具有启动的趋势(微动);当电流升至3.1 A时,平衡头在自锁位置附近出现振荡;当电流继续增至3.3 A时,平衡头能够顺利启动,但是启动瞬间仍存在明显振荡;当电流大约为3.5 A时,平衡头顺利启动且比较平稳;当电流达到3.7 A以上时,平衡头启动过程再次出现了明显振荡。上述结果证明所开发的平衡头在总电流约为3.5 A×324=1134 A时,启动较为平稳,这与前述仿真分析的取值范围是吻合的。
6 结 论
(1)介绍了一种电磁-永磁混合的磁路自锁型平衡头的自锁原理和结构,分析了影响自锁力矩和启动力矩的结构参数。
(2)利用有限元法计算了不同结构参数下平衡头的静态自锁力矩和启动力矩,基于此讨论了各结构参数的取值范围;为了确定磁极厚度,给出了自锁和启动位置的磁场分布。
(3)开发了一套平衡头原理样机,计算了其所能承受的最大轴角加速度,通过试验证明了自锁是可靠的,并经启动测试证明了当线圈安匝数达到1 134 A附近时平衡头能够顺利启动、无振荡。
[1]樊红卫,景敏卿,刘 恒.主动混合式砂轮-电主轴系统自动平衡装置研究综述[J].振动与冲击,2012,31(5):26-30,41.
FAN Hong-wei,JING Min-qing,LIU Heng.Review for studying on active hybrid auto-balancer of grinding wheel and motor spindle[J].Journal of Vibration and Shock,2012, 31(5):26-30,41.
[2]Van De Vegte J.Continuous automatic balancing of rotating systems[J].Journal of Mechanical Engineering Science,1964,6(3):264-269.
[3]Van De Vegte J,Lake R T.Balancing of rotating systems during operation[J].Journal of Sound and Vibration,1978,57(2):225-235.
[4]高 冰,苏 键,钟小滨.砂轮在线自动平衡系统[J].轴承,2004(4):15-16.
GAO Bing,SU Jian,ZHONG Xiao-bin.Online automatic balancing system for the grinding wheel[J].Bearing,2004(4):15-16.
[5]周保堂,贺世正,王 宇,等.在线自动平衡的平衡头研究[J].石油化工设备技术,1994,15(3):42-45.
ZHOU Bao-tang,HE Shi-zheng,WANG Yu.Study on balancer for online automatic dynamic balancing[J].Petro-Chemical Equipment Technology,1994,15(3):42-45.
[6]贺世正.释放液体式自动平衡头的研究[J].浙江大学学报,2001,35(4):418-422.
HE Shi-zheng.Study of liquid release auto-balancing head[J].Journal of Zhejiang University(Engineering Science),2001,35(4):418-422.
[7]欧阳红兵,汪希萱.两种新型电磁式在线自动平衡头[J].机械制造,2002,40(455):47-48.
OUYANG Hong-bing,WANG Xi-xuan.Two types of new electromagnetic online automatic balancer[J].Machinery,2002,40(455):47-48.
[8]葛哲学,陶利民.新型电磁式自动平衡装置的研究[J].机械,2001,28(6):62-64.
GE Zhe-xue,TAO Li-min.Study on a new electromagnitic automatic-balancing instrument[J].Machinery,2001,28(6):62-64.
[9]沈 伟.旋转机械主动平衡技术及工程应用[D].北京:北京化工大学,2006:12-60.
[10]王仁超,景敏卿,樊红卫,等.一种新型电磁平衡头的静态磁特性研究[J].机械与电子,2012(7):10-13.
WANG Ren-chao,JING Min-qing,FAN Hong-wei,et al.Design and magnetostatic caculation of a new electromagnetic balancer[J].Machinery&Electronics,2012(7):10-13.
In fluence of structural param eters on self-locking and starting torques of a magnetic balancer
FAN Hong-wei1,JINGMin-qing1,WANGRen-chao1,LIU Heng1,XINWen-hui2
(1.School of Mechanical Engineering,Xi'an Jiaotong University,Xi'an 710049,China;2.School of Mechanical and Precision Instrument Engineering,Xi'an University of Technology,Xi'an 710048,China)
In order to simplify a balancer's self-locking structure,amagnetic balancer getting a self-locking state by designing a magnetic circuit was proposed.It's true that when a coil is not turned on,there is a minimum magnetic resistance between two adjacent permanentmagnets and magnetic toothed discs,so a balancer can be locked at a stable position;when the coil is turned on,the balancer starts and thenmoves to the next stable position under the interaction of electromagnetic fields and permanentmagnets.The structural parameters of a balancer affecting its self-locking torque and starting one were discussed,and these parameters'ranges were roughly designed.With finite element electromagnetic analysis,the quantitative relationships among these parameters and self-locking torque and starting one were obtained.Based on the above results,the design and developmentof amagnetic balancer prototypewere completed.Its self-locking reliability calculation and starting capability test were accomplished.Comparing calculation and test results showed that the structural design and parameter selection of the developed balancer are correct.This study provided an important reference for engineering applications of the proposed balancer.
structural parameters;magnetic balancer;self-locking torque;starting torque
TH113.2
A
国家科技重大专项(2010ZX04012-012)资助
2012-11-14 修改稿收到日期:2013-03-06
樊红卫男,博士生,1984年10月生
猜你喜欢
大电机技术(2022年1期)2022-03-16
计算机仿真(2022年1期)2022-03-01
上海大中型电机(2021年1期)2021-06-09
微特电机(2020年11期)2020-12-30
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
防爆电机(2020年3期)2020-11-06
陶瓷学报(2019年6期)2019-10-27
发明与创新·小学生(2019年11期)2019-08-11
振动与冲击(2019年7期)2019-04-22