
Retard function and ship motions with forward speed in time-domain*
2014-06-01 12:30TANGKai唐恺ZHURenchuan朱仁传MIAOGuoping缪国平HONGLiang洪亮
水动力学研究与进展 B辑 2014年5期
关键词:洪亮
TANG Kai (唐恺), ZHU Ren-chuan (朱仁传), MIAO Guo-ping (缪国平), HONG Liang (洪亮)
The State Key Laboratory of Ocean Engineering, School of Naval Architecture, Ocean and Civil Engineering, Shanghai Jiao Tong University, Shanghai 200240, China, E-mail: douzi1985618@163.com
Retard function and ship motions with forward speed in time-domain*
TANG Kai (唐恺), ZHU Ren-chuan (朱仁传), MIAO Guo-ping (缪国平), HONG Liang (洪亮)
The State Key Laboratory of Ocean Engineering, School of Naval Architecture, Ocean and Civil Engineering, Shanghai Jiao Tong University, Shanghai 200240, China, E-mail: douzi1985618@163.com
(Received March 13, 2013, Revised August 25, 2013)
The time-domain calculations of retard function and ship motions in waves by the direct time-domain method (DTM) and the frequency to time-domain transformation method (FTTM) are compared and analyzed. A Wigley-hull-form ship and an S60 ship moving in waves are examined, and the corresponding retard functions are in good agreement with those given by DTM and FTTM. The comparison of retard functions in different forward speeds by the two methods is observed, and the results of ship motions in forward speed are also compared with the experimental data. On this basis, the advantage and disadvantage of them are discussed.
retard function, Green’s function method, direct time-domain method (DTM), frequency to time-domain transformation method (FTTM), ship motions, forward speed
Introduction


In the present study, the DTM and FTTM are applied in numerical calculation of the Wigley-hullform ship and S60 ship at different forward speeds. In the DTM, a 3-D time-domain Green function is adopted and the effects of forward speed and waterline in-tegral are considered. In the FTTM, the 3-D translating-pulsating source Green’s function in the Havelock form is used for studying the problem of ship at forward speed. The numerical results given by the two methods agree well with each other, which prove the transformation method is applicable. The retard functions with different forward speeds are presented and the results of ship motions with both methods shows good agreement for all studied cases with the experimental data.
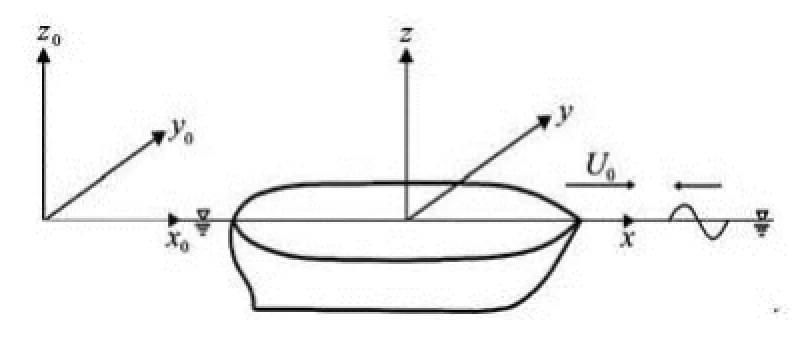
Fig.1 Coordinate systems
1. Basic theory of time domain analysis

1.2 Direct time-domain method
The problem is treated by the linear potential theory in time domain. The velocity potential can be described under the usual assumptions on irrotational flow of ideal and incompressible fluid as follows

where Φ0is the potential of the incident wave, Φithe radiation potential to the response motion of mode i( i=1,2,…6) respectively for surge, sway, heave, roll, pitch and yaw, Φ7the diffraction potential.
The radiation and diffraction potential should satisfy the definite solution problem as follows:


whereΓ0is the waterline of the ship.
By the method of impulse response function, the radiation potentialΦiis expressed as
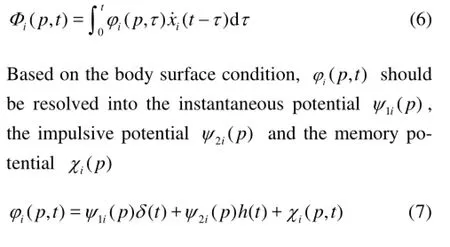
whereδ(t) is the Dirac delta function, andh(t) is the Heaviside function.


The diffraction potential can be obtained by the same method with the known body surface condition. Based on the linearized Bernoulli equation, the wave forces, including the Froude-Krylov force and the diffraction force can be obtained from the following integral equation
1.3Frequency to time domain transformation methodIn FTTM the hydrodynamic coefficients should be calculated by using the frequency domain Green function, and the coordinate system and the resolution of velocity potential are the same as those in the above subsections. The frequency domain Green function which satisfies initial boundary condition with forward speed is defined as

In order to obtain the accurate 3-D translatingpulsating source Green function and its partial derivatives, Hong et al.[14]adopted the Lobatto rule to eliminate the singularity in the Green function expressed in single integral form and the polynomial method to calculate the complex exponential integral rapidly and accurately.
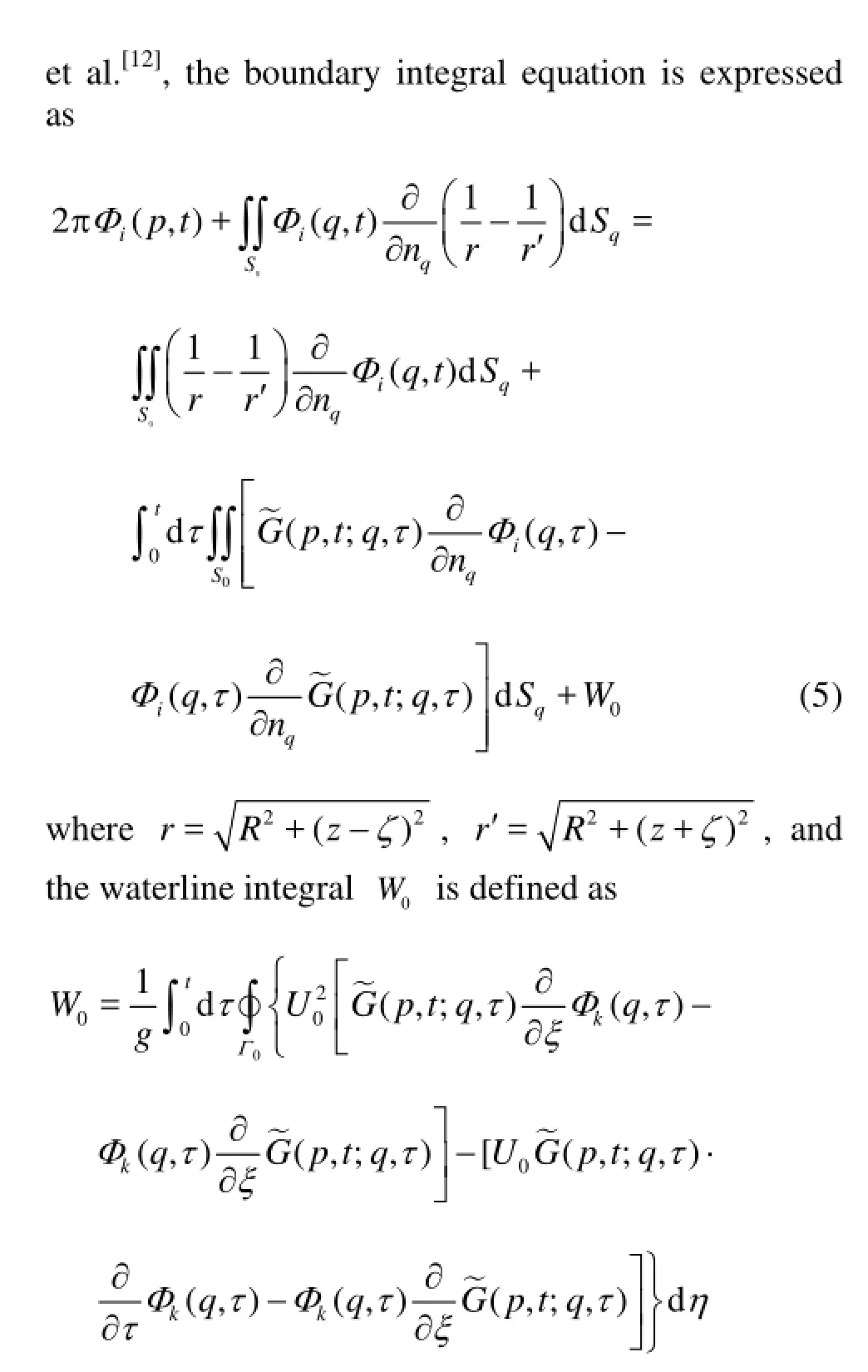
The radiation potentialiΦ should satisfy the boundary integral equation

where the integral on waterline is ignored.
Then the radiation forces and moments can be obtained by the following equation

in which Aij(ωe) and Bij(ωe) are the added masses and damping coefficients of encounter frequency ωe.
From the relationship between the radiation force in time domain and frequency domain it is obtained that

The added masses and damping coefficients at all frequencies can be obtained from time domain results by FFT. Oppositely, we can get the retard function by using inverse fast Fourier transform (IFFT).


Fig.2 Panels of wigley and S60 hull
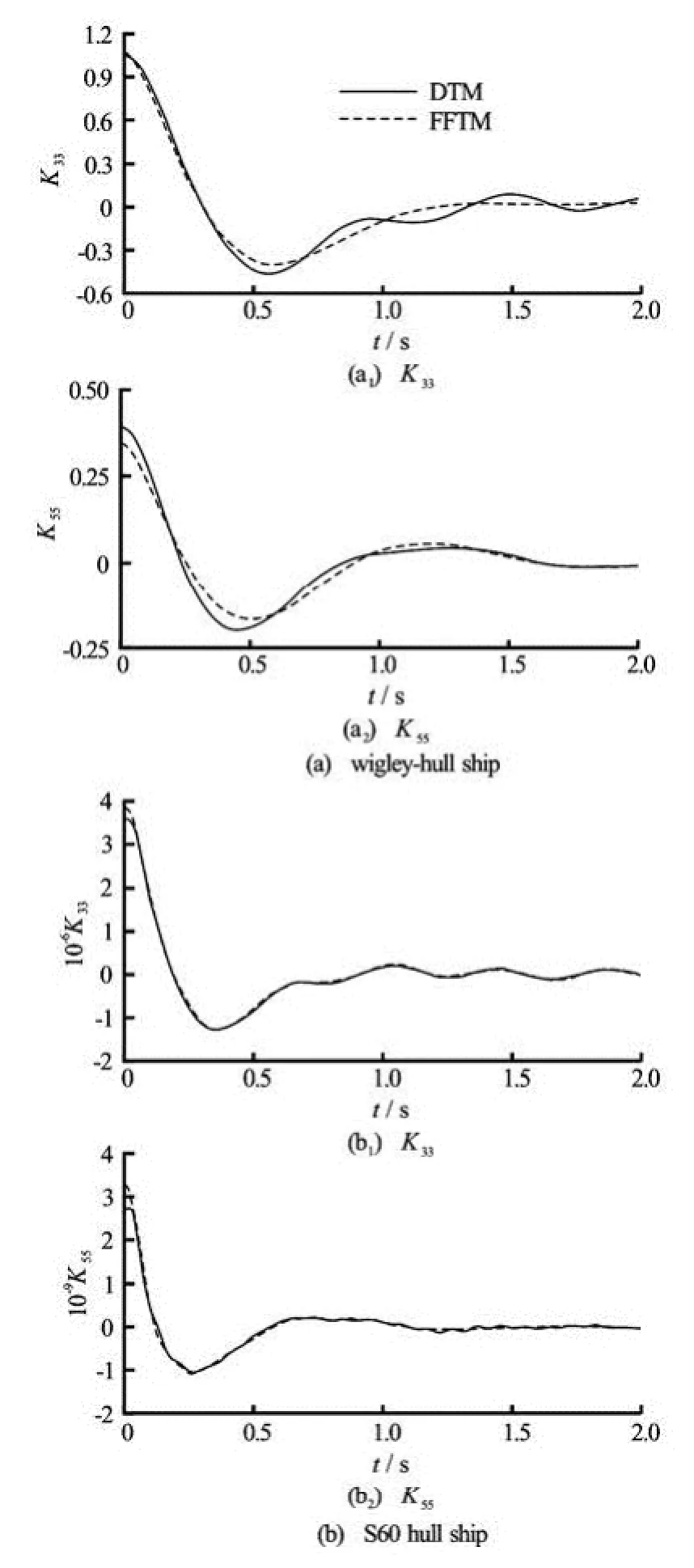
Fig.3 Retard functions at zero speed
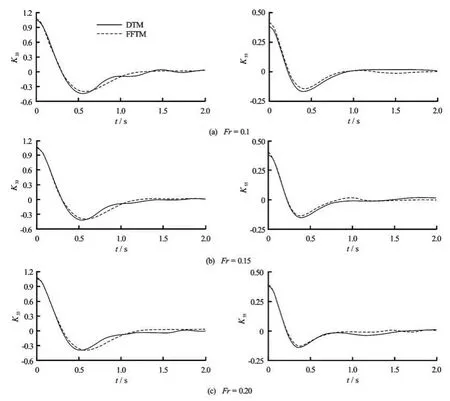
Fig.4 Retard functions of Wigley-hull ship in different forward speeds
With the relationship between time domain and frequency domain results, the two kinds of results can be transformed to each other.
2. Computational results and analysis
2.1Numerical examples

2.2Comparison of retard function at zero speed
Figure 3 shows the retard functions for heave and pitch of the Wigley-hull and S60-hull ships at zero speed, the horizontal axes represent the time with the unit s, and the vertical axes represent the retard function (33Kand55K). In the figures, the results of the Wigley-hull and S60-hull ships with the DTM and FTTM are in good agreement with each other. It can be seen both methods are efficient under the circumstance. Furthermore, It is found that in the same condition, the time expended for the DTM is 5-8 times as for the FTTM, so the FTTM is more suitable to actual engineering problems due to its computational efficiency.
2.3Comparison of retard function in forward speed
Figure 4 shows the retard functions for heave and pitch of the Wigley-hull ship at =Fr0.1, 0.15 and 0.2, the horizontal axes and vertical axes are the same as in Fig.3. Figure 5 shows the retard functions of S60-hull ship at =0.2Fr. From the figures we can see the results with the DTM and FTTM agree well with each other, which indicates both methods are effective for the radiation problem with forward speed.

Fig.5 Retard functions of S60-hull ship in forward speed

Fig.6 Motion histories of heave and pitch for Wigley-hull ship
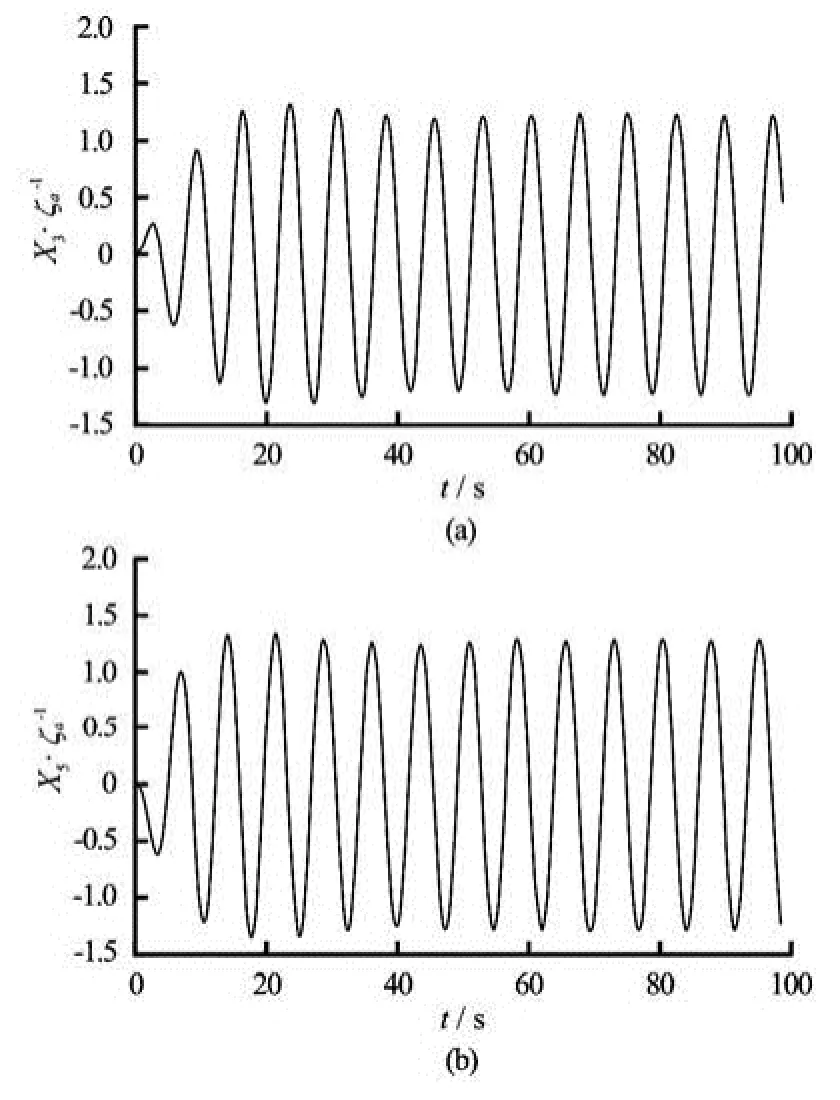
Fig.7 Motion histories of heave and pitch for S60-hull ship

Fig.8 RAO of Wigley-hull ship at =0.2Fr
2.4Comparison of ship motions at zero and nonzero forward speeds
When the retard function and wave force are evaluated by the DTM, the ship motions in head sea can be obtained from Eq.(1). During the simulation, the wave amplitude is set as constant ζa/L=0.01.Figure 6 shows the ship motion histories of heave and pitch for the Wigley-hull ship with λ/L=1 at Fr= 0, 0.2. Fig.7 shows the corresponding results for the S60-hull ship with λ/L=1.41 at Fr=0.2.
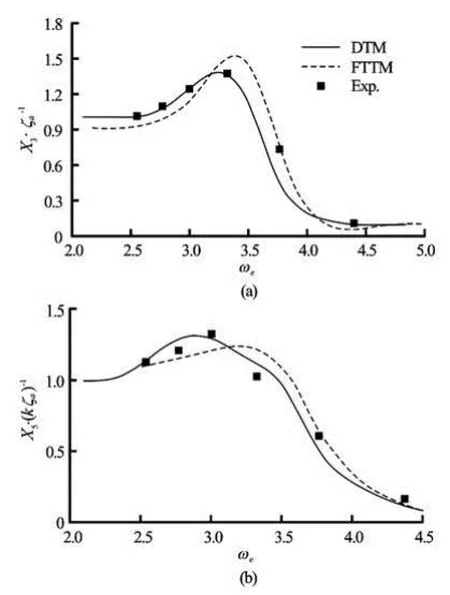
Fig.9 RAO of S60-hull ship at =0.2Fr
3. Conclusions
In the present paper, the DTM and FTTM have been presented to calculate and research the retard function of ship in waves. In the DTM, the 3-D timedomain Green function is adopted and waterline integral is considered due to the effects of forward speed. In the FTTM, The 3-D translating-pulsating source Green function in the Havelock form is used in the problem of ship with forward speed.
From the calculation of retard functions of Wigley-hull and S60 hull ships, it can be seen both DTM and FTTM are effective. The relationship between time domain and frequency domain results has been numerically proved from comparison of retard functions by DTM and FTTM. The present study proves FTTM is accurate enough and more efficient, so it is practical in dealing with engineering problems.
The prediction of ship motions with forward speed is conducted by using the DTM and FTTM. Good agreement between numerical results and experimental data is observed, which indicates the present formulation and numerical calculation are correct and work properly.
[1] DU S. X., HUDSON D. A. and PRICE W. G. et al. The occurrence of irregular frequencies in forward speed ship seakeeping numerical calculations[J]. Ocean Engineering, 2011, 38(1): 235-247.
[2] FANG Ming-Chung, CHEN Gung-Rong. The relative motion and wave elevation between two ships advancing in waves[J]. International Shipbuilding Progress, 2002, 49(3): 177-194.
[3] MCTAGGART K., CUMMING D. and HSIUNG C. C. Seakeeping of two ships in close proximity[J]. Ocean Engineering, 2003, 30(8): 1051-1063.
[4] SUN Ming, LIU Pei-lin and SUN Li-ping et al. Hydrodynamic analysis of multi-body operation in deepwater installation[J]. Chinese Journal of Hydrodynamics, 2011, 26(3): 351-358(in Chinese).
[5] QIU W., PENG H. Computation of large-amplitude ship motions in the time domain[C]. Proceedings of 9th International Conference on Numerical Ship Hydrodynamics. Ann Arbor, Michigan, USA, 2007.
[6] SEN D. Time-domain computation of large amplitude 3D ship motions with forward speed[J]. Ocean Engineering, 2002, 29(8): 973-1002.
[7] KIM K. H., KIM Y. H. On technical issues in the analysis of nonlinear ship motion and structural loads in waves by a time-domain Rankine panel method[C]. The 23rd International Workshop on Water Waves and Floating Bodies. Jeju, Korea, 2008.
[8] TAGHIPOUR R., PEREZ T. and MOAN T. Hybrid frequency-time domain models for dynamic response analysis of marine structures[J]. Ocean Engineering, 2008, 35(7): 685-705.
[9] PEREZ T., FOSSEN T. I. Practical aspects of frequency-domain identification of dynamic models of marine structures from hydrodynamic data[J]. Ocean Engineering, 2011, 38(1-2): 426-435.
[10] KIM Y., NAM B.W. and KIM D. W. et al. Study on coupling effects of ship motion and sloshing[J]. Ocean Engineering, 2007, 34(16): 2176-2187.
[11] ZHU Hai-rong. Three dimensional time domain approach and application for ship motions[D]. Doctoral Thesis, Shanghai, China: Shanghai Jiao Tong University, 2009(in Chinese).
[12] DAI Yi-shan, DUAN Wen-yang. Potential flow theory of ship motions in waves[M]. Beijing, China: National Defence Industry Press, 2008, 1: 207-213(in Chinese).
[13] KARA F. Time domain hydrodynamics and hydroelastic analysis of floating bodies with forward speed[D]. Doctoral Thesis, Glasgow, Scotland, UK: University of Strathclyde, 2000, 37-38.
[14] HONG Liang, ZHU Ren-chuan and MIAO Guo-ping et al. Numerical calculation and analysis of 3-D Green’s function with forward speed in frequency domain[J].Chinese Journal of Hydrodynamics, 2013, 28(4): 423-430(in Chinese).
[15] BAO W., KINOSHITA T. Asymptotic solution of wave-radiating damping at high frequency[J]. Applied Ocean Research, 1992, 14(3): 165-173.
[16] HONG Liang, ZHU Ren-chuan and MIAO Guo-ping et al. Calculation and comparison of ship motion with forward speed in frequency domain[C]. Proceeding of the 25th National Conference on Hydrodynamics and 12th National Congress on Hydrodynamics. Zhoushan, China, 2013, 1000-1007(in Chinese).
[17] GERRITSMA J., BEUKELMAN W. Comparison of calculated and measured heaving and pitching motions of a Series 60, cb=0.7 ship model in regular longitudinal waves[C]. 11th international towing tank conference. Tokyo, Japan, 1966, 436-445.
10.1016/S1001-6058(14)60077-9
* Biography: TANG Kai (1985-), Male, Ph. D.
ZHU Ren-chuan,
E-mail: renchuan@sjtu.edu.cn
猜你喜欢
公民与法治(2023年1期)2023-03-31
党员生活(2022年7期)2022-07-22
Plasma Science and Technology(2021年11期)2021-11-30
Plasma Science and Technology(2021年9期)2021-09-10
Plasma Science and Technology(2021年6期)2021-06-21
文化产业(2020年15期)2020-07-22
华人时刊(2017年21期)2018-01-31
小学生学习指导(低年级)(2017年4期)2017-02-17
河北书画研究(2016年6期)2016-02-03
环球市场信息导报(2015年15期)2015-12-03

- 水动力学研究与进展 B辑的其它文章
- Stability of fluid flow in a Brinkman porous medium-A numerical study*
- Multi-point design optimization of hydrofoil for marine current turbine*
- An iterative Rankine boundary element method for wave diffraction of a ship with forward speed*
- Sediment rarefaction resuspension and contaminant release under tidal currents*
- Vadose-zone moisture dynamics under radiation boundary conditions during a drying process*
- Experimental and numerical study on hydrodynamics of riparian vegetation*