某食品加工企业腌泡池智能清洗车设计的方案探讨
2014-06-09 12:33付宏才黄宋魏
机电产品开发与创新 2014年3期
王 冬,付宏才,黄宋魏
(1.云南农业大学 机电工程学院,云南 昆明 650201;2.昆明理工大学 国土资源工程学院,云南 昆明 650093)
某食品加工企业腌泡池智能清洗车设计的方案探讨
王 冬1,付宏才1,黄宋魏2
(1.云南农业大学 机电工程学院,云南 昆明 650201;2.昆明理工大学 国土资源工程学院,云南 昆明 650093)
针对某食品加工企业上百个大型腌泡池的经常性清洗任务需求,基于现代机电控制技术,提出智能清洗车的解决方案,重点探讨这种清洗车的型式及结构、液压系统与电气控制部分的设计。
智能清洗车;型式结构;液压系统;电气控制;腌泡池
0 引言
某食品企业是云南地区一家以传统腌制食品加工为主的出口型企业,主打产品包括以云南特产丘北辣椒为原料的腌辣椒等。企业生产规模较大,生产流程整体上处于自动化、半自动化程度。其中,上百个腌制食品的腌泡池 (腌泡池的长×宽×高=6×3×4米)在定期不定期轮换使用时,需要清理和清洗(清洗面包括四壁和池底),而目前这一工作主要依靠人工来完成;但在清洗过程中存在着许多不利因素:池底释放有毒气体危害人身安全,清洗人员上、下池子的高边墙不方便也不卫生,清洗需要较多劳动力、耗时长等。因此,对该流程做自动化改造势在必行,本文对此探讨智能清洗车的解决方案。
1 清洗车的结构及工作原理
1.1 清洗车的结构组成
清洗车的结构如图1所示,其中图1(a)和图1(b)代表清洗车的两种工作状态,图1(c)是清洗车的底座形状。该清洗车主要由行走机构、清洗刷、清洗刷转动装置、电机、液压泵、底座、传动链条、安装支架、螺旋升降装置[1]、导轨、配重块,清洗液箱、水箱、控制柜、吊钩等组成。其中行走机构主要由支架、电机 (液压马达)、传动轮、支撑轮和履带组成;清洗车的底座为空心,前后对称设计成半圆形;在半圆形的圆心处设有螺旋升降装置与转动机构,螺旋升降装置一侧安装有与洗刷装置相连的安装支架,在安装支架上装有电机,电机上装有链轮,电机通过链轮、链条来带动各清洗刷转动;在螺旋升降装置另一侧安装有配重块,用来平衡洗刷装置的偏移重量,并且在螺旋升降装置两侧设有上升导轨;在底座中央设有清洗液箱、水箱和电气控制柜,底座空心处设有线路和底部清洗刷传动装置,底部在半圆形的直径上设有两排清洗刷,用来实现池底面的清洗,其中控制柜中安装有控制器、锂充电电池组及线路。
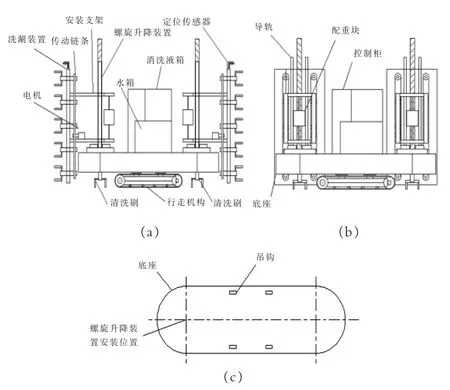
图1 清洗车的结构简图Fig.1 Structure schematic of the flushing vehicle
1.2 清洗车的移动
在行走机构[2]上安装有两个传动轮,传动轮上安装有履带,履带上开有防滑凹槽,当电机转动时,传动轮带动履带旋转,履带与地面摩擦推动小车前进。传动轮直接与电机的输出轴相连接,在输出轴上安装有编码盘,当清洗车直线前进时,保证两个电机的转速一致;当转弯时,根据编码盘编写的程序,由程序控制转弯大小,实现清洗车的非直线移动。
1.3 清洗车的清洗
在每个腌泡池里 “设有”一个初始位置,清洗工作开始前,将清洗车放置到初始位置附近,接通电源,根据定位传感器的定位,通过程序控制使其移动到工作位置。当清洗车到达工作位置时,一方面,开启液压泵,具有压力的清洗液喷射到墙面和地面上;另一方面,电机带动清洗刷转动。在程序设定的墙壁湿润后,移动清洗车,进行墙面清洗工作,遵循先上后下的原则,先清洗墙面高处,小车前后移动,直线清洗,在清洗完洗刷装置的工作范围之后,通过螺旋升降装置调整清洗刷的工作高度;根据洗刷装置上每两个清洗刷之间的距离与螺旋升降装置之间的关系,每次调整的工作高度是通过程序预先设定的。假设已知螺旋升降装置上螺旋为等距两线螺纹,螺距为P,洗刷装置上每两个清洗刷之间的距离为H,它们之间的关系为H=2nP,n为螺旋转动的圈数。
2 洗刷装置的结构及工作程序
2.1 洗刷装置的结构
如图2所示,洗刷装置主要由清洗刷安装板、清洗刷、定位传感器以及安装卡槽组成。清洗刷固定于清洗刷安装板上,清洗刷安装板的背面安装有四个卡槽,用来安装与清洗车相连接的支架,在清洗刷安装板的顶端安装有定位传感器;清洗刷安装板上共装有五行清洗刷,每行两个,以墙壁高4m为例,设洗刷装置安装板总高为2.5m,洗刷装置每两个清洗刷之间的为50cm,在实际应用中可以根据墙面的高度在小车刚性范围内进行拓展安装。
其中,清洗刷主要由毛刷、转盘、喷头、出水管路、轴承、轴套、传动链轮及管路接头组成。转盘上装有毛刷,转盘直径为20cm,毛刷长15cm,毛刷相对于转盘的中心线向外侧倾斜一定角度α(5°~15°),保证清洗时毛刷与墙面的接触面积,转盘通过轴承、轴套与出水管路相连接,转盘后端固装有链轮,出水管路固定于清洗刷安装板上,出水管路前端装有喷头,后端装有水管接头,喷头上设有九个喷眼,喷头顶端设有一个喷眼,周围设有八个喷眼,分两圈,每圈4个,周围喷眼空相对于转盘中心线倾斜一定的角度β,β的角度与毛刷的长度有关,使得里面的喷眼喷射出的清洗液能够湿润毛刷,外面的喷眼与顶端的喷眼喷射出的清洗液射到墙面上。毛刷的长度和每行清洗刷之间距离相关保证清洗工作时不会出现清洗遗漏现象。
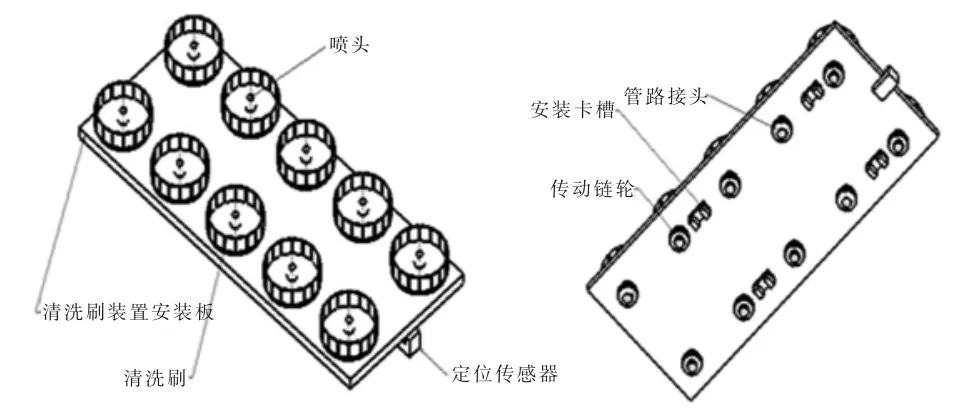
图2 洗刷装置结构简图Fig.2 Structure of the flushing unit
2.2 洗刷装置的工作程序
当清洗工作开始时,清洗液经过管路接头和喷头形成压力水流,喷射到墙面和毛刷,湿润墙面与毛刷,通过时间差达到浸泡墙面污渍、降低污渍对墙面附着力的作用;清洗刷转盘在与链轮相连接的传动装置的带动下旋转,与转盘相连接的毛刷在高速运转的状态下与墙面接触,毛刷的刷力分离墙面的污渍。定位传感器用来检测洗刷装置与墙面的距离,其检测结果用来调整清洗刷与墙面的距离,保证墙面清洗的最佳距离和洗刷装置与墙面的安全距离。安装卡槽用来连接支架,支架则与清洗车升降装置相连接,实现洗刷装置的上下位置调整。
2.3 液压系统的工作程序
如图3所示为清洗装置的液压系统原理图。液压系统[3~5]主要由液压泵、过滤器、清洗液箱、水箱、单电控二位二通电磁阀、双电控三位四通电磁阀、单向阀、压力表、液位计、溢流阀、管路接头、软管和压力传感器等组成。
清洗工作开始时,控制器启动液压泵,2#、3#电磁阀同时通电接通负压回路和水箱;电机带动液压泵将水箱内的清水抽出,经过单向阀,以一定的压力输送到7#电磁阀处;7#电磁阀控制清水单独流向墙壁或地面清洗刷,8#电磁阀通电可以实现墙面与地面的同时清洗;当7#电磁阀未通电时,清水经6#电磁阀回到水箱中。当接通1#、4#、5#电磁阀时控制清洗液回路,其工作原理与控制清水回路原理相同。当清水(清洗液)通过7#电磁阀后经过管路接头、软管,被分成多条支流连接到洗刷装置上的清洗刷出水管路上。9#、10#电磁阀是分别与水箱、清洗液箱接通的外部水路,当液位低于低限值时控制系统发出报警,并自动打开9#与10#电磁阀。当清洗工作进入智能清洗阶段,控制器可以采集管路过滤器两端的压差信号,以及水箱和清洗液箱的液位信号,设定清洗的时间长度和处理报警,实时地监控整个系统。
3 清洗车的控制原理
3.1 控制系统的结构设计
智能清洗车的系统控制器采用S7-200 PLC,控制程序由STEP7—MicroWIN V4.0编程软件开发,控制系统遵循模块化设计,将智能清洗车的控制系统分为三个模块:行走控制模块,液压控制模块和洗刷工作控制模块。模块化编程是根据功能分为不同的逻辑块,其特点是易于分工合作,调试方便[6]。其中,行走控制模块控制小车的前进、后退和转弯;液压控制模块控制清洗液的传送与供给,并采集水箱(清洗液箱)的液位及管道压力等数据,实现水箱(清洗液箱)自动供给清水、清洗液并调节管路压力、控制清洗液的喷射力。洗刷工作控制模块实现清洗刷的传动和位置的控制。

图3 清洗车的液压系统原理图Fig.3 Schematic of the hydraulic unit
3.2 控制系统原理
当按下启动按钮时,系统通电,清洗车开始工作,控制清洗车到达初始位置,切换到程序控制的智能模式,根据程序的设定,清洗车执行相关指令,直到清洗任务完成,清洗车回到初始位置,退出程序,发出停机指令,结束清洗工作。清洗车的工作流程如图4所示。

图4 智能清洗车的工作流程图Fig.4 Work flow of the intelligent flushing vehicle
4 结束语
本文根据某食品加工企业腌泡池的实际情况,提出了智能清洗车的解决方案,分别对清洗车的体型结构、清洗装置及电气控制部分的设计方案进行了探讨。该装置制造成本低、占用空间面积小、移动方便,在工艺上易于实现,可大大减轻清洗工人的劳动强度。
[1]郑玉华,秦四成.典型机械(电)产品构造[M].北京:科学出版社,2004.
[2]马强,陈志,张小超.苹果采摘机器人关键技术研究[D].中国农业机械化科学研究院,2012.
[3]杨佳,卿华,杨小林,赵汉武.一种基于微控制器的新型发动机清洗车设计[J].机电产品开发与创新,2011,3.
[4]杜来林,杨超.Z9FDQX型发动机清洗车的设计与使用[J].液压气动与密封,2012,7.
[5]杨曙东,何存兴.液压传动与气压传动[M].武汉:华中科技大学出版社,2008.
[6]陈海霞.西门子S7-300/400PLC编程技术及工程应用[M].北京:机械工业出版社,2012.
Discussion on Design of an Intelligent Flushing Vehicle for the Pickled Pools of a Food-processing Enterprise
WANG Dong1,FU Hong-Cai1,HUANG Song-Wei2
(1.Faculty of Mechanical and Electrical Engineering,Yunnan Agriculture University,Kunming Yunnan 650201,China;2.Faculty of Land and Resources Engineering,Kunming University of Science and Technology,Kunming Yunnan 650093,China)
Aimed at the regular cleaning assignment need for nearly a hundred of large pickled pools of a food-processing enterprise,this paper presents the solution of intelligent flushing vehicle by modern mechanical and electrical control technology,and mainly discusses on the design of the physical structure,hydraulic system and electrical control of the intelligent flushing vehicle.
intelligent flushing vehicle;physical structure;hydraulic system;electrical control;pickled pool
TH-39
:Adoi:10.3969/j.issn.1002-6673.2014.03.020
1002-6673(2014)03-051-03
2014-04-13
王冬(1989-),男,江苏盐城人,2012级农业机械化硕士研究生;付宏才(1966-),男,湖北随州人,博士,副教授。研究领域:机电一体化、决策支持系统等。已发表论文三十余篇
猜你喜欢
当代陕西(2020年17期)2020-10-28
世界有色金属(2018年15期)2018-01-30
学苑创造·A版(2017年5期)2017-05-09
电子制作(2017年19期)2017-02-02
工业设计(2016年11期)2016-04-16
林业与生态(2016年2期)2016-02-27
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
长江大学学报(自科版)(2015年19期)2015-12-04
小雪花·成长指南(2015年10期)2015-10-23
化工生产与技术(2014年3期)2014-02-27