
基于半实物无人机训练模拟器研究
2014-07-08 02:15陈舰波于正林邱文英
机械工程师 2014年9期
陈舰波,于正林,邱文英
(长春理工大学 机电工程学院,长春130022)
0 引 言
随着无人机的广泛应用,无人机训练模拟器也越来越重要。但现有很多训练模拟器都是抛开真实设备进行计算机仿真,不能真实反映实际操作时会出现的问题。本文利用真实无人机及其地面控制站,设计了一种基于半实物无人机训练模拟器,该模拟器有着真实的操作环境,它能够真实反映无人机的飞控、无线传输、地面控制站等子系统的真实情况,能够对地面控制站全部操作人员进行训练,并且在训练的同时还能对这些系统进行测试。
1 系统硬件结构
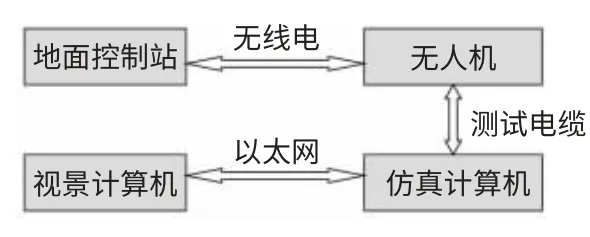
图1 训练模拟器硬件结构图
该训练模拟器硬件结构连接如图1 所示。有两台计算机分别为视景计算机和仿真计算机,它们由以太网连接。仿真机与无人机中的飞控计算机由专用测试电缆连接。无人机与地面控制站是用原有的真实无线电连接。
2 系统原理
系统最主要有仿真机和视景机两部分。仿真机连接无人机的飞控计算机,接收飞控计算机来自地面控制站的飞控指令。仿真机通过建立数学模型解算无人机的飞机方程,并且完成任务设备模型解算。仿真机再把计算出的无人机飞行参数和任务设备参数通过以太网传送给视景计算机。飞行参数包括无人机的飞行姿态、升力、阻力、发动机的推力等。任务设备参数包括视点位置、焦距、俯仰角等。视景计算机根据接收的数据进行视景仿真,生成任务设备所能看到的图像。视景机还将图像和此时无人机的飞行状态、位置以及任务设备的状态一起通过以太网传输给仿真计算机,仿真计算机再通过专用测试电缆将这些信息传输给无人机,最终无人机通过真实无线电将这些信息传送到地面控制站。这样地面控制站就可以得到所需的图像及无人机相关数据,再由相应的操作人员进行处理,接着操作无人机。
3 系统的软件设计
3.1 仿真机软件
仿真机主要是对地面控制站所发的指令进行解算,然后传送给视景计算机。Matlab/Simulink 具有强大的数据/函数处理和仿真能力,故仿真机用Matlab/Simulink 方式编写仿真模型。根据仿真机的作用,可由飞机方程、任务设备外特性模型、接口模块这三部分组成仿真模型[1]。仿真流程图如图2 所示[2]。

图2 仿真流程图
仿真模型中飞机方程部分包括气动受力和力矩模块、六自由度方程解算模块、动力模块、传感器模块。其中气动受力和力矩模块是根据所接收无人机相关数据对无人机的升力、阻力、侧力以及3 个轴的转动力矩进行计算;六自由度方程解算模块是对飞机模型的飞行姿态、位置等信息进行计算;动力模块是根据接收的发动机信息对飞机的推力和扭矩进行计算;传感器模块是对飞机所能得到的传感器信息进行计算,如高度空速仿真、磁力计仿真、垂直陀螺仿真等。
仿真模型中的任务设备外特性模型包括视点位置计算模块、跟踪角度计算模块、焦距计算模块、平台角度计算模块。其中视点位置计算模块是计算出任务设备的观察视点处于什么位置;跟踪角度计算模块是对跟踪视线与机体的夹角进行计算;焦距计算模块是根据接收的指令对任务设备的焦距进行计算;平台角度计算模块是对平台的实时角度进行计算。
仿真模型中的接口模块包括串口数据接发模块和网络数据接发模块。其中串口数据接发模块是为了接收无人机所发送的数据以及发送仿真数据给无人机。网络数据接发模块是发送飞机状态数据到视景计算机,以及从视景计算机接收图像和无人机当前状态信息、任务设备相关数据。
3.2 视景机软件

图3 仿真系统开发流程图
视景仿真就是要利用三维图像再现无人机的飞行过程。为了使训练效果更好,模拟场景应该逼近真实飞行场景。视景仿真分三维实体建模和场景驱动两部分。经比较,本设计把Vega Prime 视景仿真平台、Multigen Creator建模工具以及VC++结合设计视景仿真。首先利用Creator 强大的三维建模能力建立虚拟三维实体,然后在Vega Prime中将三维实体模型生成虚拟场景,并通过Vega Prime 的交互函数控制虚拟场景,最后再通过VC++生成界面[3]。仿真系统开发流程图如图3 所示。
3.2.1 三维实体建模
视景仿真中三维实体建模分无人机建模和地形建模。

图4 阴天和晴天飞行情况

图5 任务设备观测图
无人机建模包括无人机本体建模、无人机任务设备建模。无人机本体建模可直接利用Creator 进行建模。无人机本体一般来说可见结构包括:机头、机身、机翼、水平尾翼、垂直尾翼、副翼舵、方向舵、升降舵等部分。无人机本体结构复杂,故可采用放样方法来创建。无人机任务设备本文只设计成能完成摄像侦查任务的光电吊舱,能仿真出真实任务设备所能完成的所有动作。
地形建模主要是建立实时的地形模型如山川、河流、建筑等。Terrain Pro 是Multigen Creator 的地形建模模块,能够快速创建大面积地形数据库,它可以使建立的地形非常接近真实世界,并且地形所带有的三维文化特征和图像特征具有很高的逼真度。在地形建模中投影方式的选择和地形转换算法的选择是地形生成过程的关键技术[4]。Multigen Creator 提供了MAP 投影,它提供5 种投影 方 式 包 括 Flat Earth、UTM(Universal Transverse Mercator)、Geocentric、Lambert conic conformal、Trapezoidal。选择哪种投影方式我们应根据所要建立的地形而定。地形转换算法Creator 提供了4 种,包括Polymesh、Delaunay、TCT(Terrain Culture Triangulation)和CAT(Continuous Adaptive Terrain)。而我们选择的地形转换算法也应根据实际情况合理选择。
3.2.2 场景驱动
视景驱动就是要把静态的三维模型进行视景仿真,即设计视景仿真环境,让使用者可以与场景进行交互,有各种感官效果,有身临其境的感觉。三维视景仿真环境应包括无人机飞行驱动模块、视点模块、碰撞检测模块、仿真气象模块。
无人机飞行驱动模块就是要在虚拟场景中控制无人机模型的六自由度运动;碰撞检测模块是要尽量模拟出物体间碰撞的真实状态,如物体碰撞产生的爆炸、火焰、烟雾等。碰撞检测可以增加虚拟场景的真实性。同时碰撞检测可以用于感知地面的存在,才能更好地模拟无人机的起飞、降落、坠机等。碰撞检测可以引入最常用的包围盒方法来辅助碰撞检测;仿真气象模块是模拟出不同天气环境,如阴天、晴天、多云、雨天等,使仿真环境更加逼真。如图4 所示为阴天和晴天飞行情况。
无人机视点模块是要设计多个视点用于观察无人机的飞行状况以及用于实现任务设备载荷。当观察无人机状态时视点设在无人机本体旁的某一位置,时时跟随着无人机,此时视景机显示的图像能看到无人机的飞行情况,即在图像上能看到无人机本体。当需要实现任务载荷时,将视点设在任务设备上,此时视景机上的图像就是任务设备所观测到的图像,视景机得把此时图像传送到仿真机,最终传回地面控制站。如图5 所示为某时刻任务设备所观测到的图像。
4 结 论
该训练模拟器能够完成模拟训练。训练器不仅能够得到任务设备所观测的图像,还能得到无人机的飞行图。飞控操作员能够通过观察无人机飞行图找到自己操作的不足之处。该训练器还能够真实反映无线电传送所造成的延迟,组成简单,操作方便。由于训练评估没有统一标准,本文并未设计评估模块,但该训练模拟器足够完成对操作员的训练。
[1] 吴佳楠,王伟.基于任务设备模拟的新型无人机训练模拟器研究[J].计算机测量与控制,2011,19(12):3105-3107.
[2] 姚俊,马松辉.Simulink 建模与仿真[M].西安:西安电子科技大学出版社,2002.
[3] 徐鹤.基于Multigen Creator/Vega Prime 无人机三维视景仿真系统的设计与实现[D].南京:南京航空航天大学,2008:1-12.
[4] Multigen-Paradigm,Inc.Creator Terrain Guide[M].USA,Multigen-Paradigm,Inc,2004:3-80.
[5] 卢卫平.基于Vega Prime/multigen creator 飞行复现视景仿真系统的设计[D].南京:南京航空航天大学,2011.
[6] 陈永春.从Matlab/simulink 模型到代码实现[M].北京:清华大学出版社,2002.
(编辑立 明)
猜你喜欢
齐齐哈尔大学学报(自然科学版)(2021年3期)2021-04-19
重庆与世界(2019年10期)2019-11-25
中国电气工程学报(2019年3期)2019-09-10
无人机(2017年10期)2017-07-06
水利科技与经济(2016年6期)2016-04-22
河南电力(2016年5期)2016-02-06
新闻前哨(2015年2期)2015-03-11
中国水利(2015年5期)2015-02-28
舰船科学技术(2015年8期)2015-02-27
振动、测试与诊断(2014年4期)2014-03-01
