ATV车操纵稳定性测试系统开发及应用
2014-07-08 02:16叶芳徐中明谭海伟翟喜成
机械工程师 2014年10期
叶芳,徐中明,谭海伟,翟喜成
(1.重庆工商职业学院,重庆 400052;2.重庆大学 机械工程学院,重庆 400030;3.德国艾默克测试测量有限公司 上海代表处,上海 200052;4.重庆合川职教中心,重庆 401520)
0 引 言
ATV(All-terrain-vehicles)车,又称全地域车,是具有跨骑式座椅、把式转向、三轮或四轮结构,采用大尺寸、低气压轮胎的单人多用途车辆[1],在国内通常被称为沙滩车。ATV 车主要应用领域涵盖了农业、畜牧业、林业、狩猎、景观美化、牧场经营、探险、工业、建筑及军事等,被国内外市场广泛认同。然而目前对ATV 的操纵稳定性的考察还有缺陷,操纵稳定性的研究常采用试验和仿真来进行,仿真分析的方法准确性较弱,个体差异较大,不能正确和定量地评价ATV 的操纵稳定性,所以有必要开发出适合ATV 试验工况的测试分析评价系统。
1 ATV 车操纵稳定性评价方法
车辆的操纵稳定性,指的是车辆在高速行驶下,接受驾驶员的控制能力及行驶方向的稳定性[2-5]。为评价ATV操纵稳定性,主要进行4 个试验:稳态回转试验、转向盘转角脉冲输入试验、转向盘阶跃试验、蛇形试验。试验方法、数据处理方法等参照GB 6323《汽车操纵稳定性试验方法》进行。
稳态转向特性描述了汽车在转向输入下能否稳定的动力学表现,当车速大于某临界车速时,过多转向的汽车受到轻微转向干扰也会发生运动不稳定现象[6-7]。因此不允许汽车转向特性有过多转向,然而很多汽车在侧向加速度ay到达一定值后,会出现过多转向现象,这个侧向加速度an称中性转向点。对一般乘用车,an不应小于5 m/s2,一般的说ay=4 m/s2时,(α1-α2)=2°左右最好,不应大于4°。
转向盘转角阶跃输入试验是指给转向盘一个突然的固定不变的转角δsw输入,相当于给系统一个阶跃位移干扰。如果系统稳定,在此干扰下,将从一个稳态(直线行驶)过渡到另一个稳态(转圈行驶),主要用横摆角速度γ(t)来表达多个评价指标[8]。
横摆角速度相对阻尼系数ξ 随车速V 的增大而减小。为激起横摆角速度的振动现象,转向盘转角阶跃输入试验的试验车速都比较高。在ISO 7410-88《侧向瞬态响应试验方法》中,要求试验车速为80 km/h;在GB/T 6323.2-94《转向盘转角阶跃输入方法》中,规定试验车速为被测汽车最高车速的70%。具体试验方法是,被测车辆在加速路段以试验车速V 等速转向行驶,进入试验区段后,继续以稳定车速V 按场地要求路线行驶。同时记录,当车辆行至指定地点,驾驶员应以最快的速度转动转向盘(或手把)至预先确定的转角,并保持转向盘(或手把)转角不变,同时保持节气门和油门开度不变。从驾驶员转动转向盘开始,至本次试验结束,记录时间应为6s 左右,预先确定好的转向盘转角位置,由试验要求达到的稳态侧向加速度值决定。
汽车转向盘转角阶跃输入试验结果,比较理想的数据处理方法是对横摆角速度响应时间历程γ(t)进行非线性曲线拟合,计算出上述指标数值。
转向盘转角脉冲输入试验是为得到作为线性动力学系统的车辆的频率响应特性,以此体察车辆转向输入响应的真实以及失真程度[9]。
进行试验时,首先标定直线行驶位置,然后给转向盘一个三角脉冲转角输入,即向左转动转向盘,并迅速转回原处保持不动。记录横摆响应全过渡过程,直至车辆回复到直线行驶状态。转向盘转角输入脉宽为0.3~0.5 s,其最大转角应使本次试验过渡过程中最大侧向加速度为4 m/s2左右,当车速为80 km/h 时,轿车转向盘转角约为70°~90°,试验期间,车速保持不变。
试验应在往返两个行驶方向进行,每个行驶方向至少按左、右方向转动转向盘(转角脉冲输入)各3 次。对于车速低的,可以将试验车速定低点。
要得到汽车的横摆角响应的频率特性图,可将采集的数据在专用的信号处理设备上用快速傅立叶变换得到,也可通过专用软件实现。
蛇形试验属于闭路系统试验,反映汽车进行急剧转向的能力,同时反映车辆舒适性和安全性[10]。试验时驾驶员驾驶被试车辆以基准车速通过有效标桩区,小型汽车的基准车速为65 km/h;最大质量大于6 t 的汽车,基准车速为60 km/h;若大于15 t,基准车速为50 km/h。汽车进入入口前,打开仪器进行记录,一直记录到汽车驶出出口,如图1 所示。
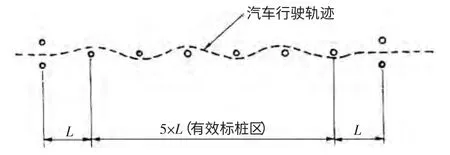
图1 蛇形穿杆试验示意图
2 测试系统硬件设计
2.1 测试系统结构
根据上述评价方法,操纵稳定性测试系统由陀螺仪、车速传感器,信号调理电路、数据采集器、外触发电路、交换机、普通网线、计算机构成。系统结构原理图如图2 所示。系统工作原理:通过GPS 车速传感器和角速度陀螺仪测量车辆质心位置处的车速信号和横摆角速度信号,经过信号调理电路得到适当的电压信号,由采集系统将几路信号采集并存储于PC 硬盘或CF 卡中[13]。
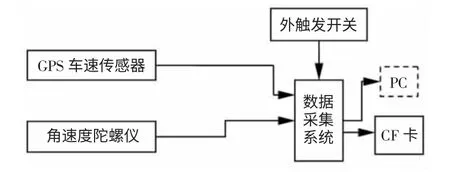
图2 操纵稳定性道路试验测试系统框架图
测试系统中的数据采集箱必须便携、稳固、抗干扰,拥有6 个以上通道同步采样,通道可扩展。选择IMC 设备公司开发的便携式数据采集器(IMC PL2/UICP8),该系统具有8 模拟通道进行同步采集,提供了16 位数字通道以备外触发。使用以太网接口技术,数据采集机箱和计算机完全分离,操作方便,并且可利用Hub 进行多台采集器并联,扩展通道。
利用IMC 采集模块提供的16 位数字输入模块以及内部的5V 恒流源,配备普通开关,设计了外触发模块。选用DIN_Bit01 作为触发源,在DSUB-PLUG 数字盒内的BIT_01 端和LCOM 端接一个节点开关。开始触发测量为高电平,结束触发测量为低电平。图3 所示为其电路图。角速度陀螺仪选型为IMU201 六自由度惯性传感器[11]。车速传感器选用自主开发的VDL-1 型GPS 车速传感器。

图3 数字接口盒的电路图
2.2 传感器开发与应用
车速的精确测量直接影响车辆操纵稳定性试验的准确性,传统的车速测量仪使用不便,测量误差相对较大,针对本测试系统,利用GPS 测速技术研制了一款高精度、低成本的车速传感器(VDL-1 型GPS 车速传感器),将其应用在汽车操稳性试验中,降低了汽车操稳性试验条件的困难程度[12]。
该传感器将广泛应用于定位的GPS 技术应用在瞬时车速测量上,利用单片机PIC16F877 作为控制器的核心,E580 OEM 模块接收GPS 信号,形成了由6 个模块组成的GPS 车速传感器系统,分别为:1)电源转换系统,实现+12 V 和+5 V 供电2 种方式供电,实现+12 V 向+5 V,+5 V 向+3 V,+12 V 向+3 V 的多种电压转换;2)GPS 接收模块,采用国产GPS 导航模块E580 接收GPS 卫星信号;3)电平转换模块,设计电平转换电路实现单片机、GPS 模块与计算机异步串行通讯接口之间的通讯;4)单片机控制模块,选用Microchip 公司的PIC 8 位单片机16F877 A作为主控元件,实现信号通讯、转换、控制、显示等功能;5)D/A 转换模块,选用美国MAXIM 公司的8 位串行D/A芯片MAX518,实现数字信号向模拟信号的转变,实现数字信号和模拟信号双输出,以便采集器采集;6)显示模块,选用动态扫描显示方式,将速度信号对应的ASCII 码转换成二进制码,通过单片机串行口RB0~RB7 直接输出到八段LED 数码管a~dp 上,实现车速的实时显示[13]。
该传感器可测车速范围为0~200 km/h,灵敏度为51(km/h)/V。成本低廉,测量精度较高,抗干扰性能好,易于扩展升级。应用在ATV 操稳性试验中,提高了测试精度,降低了试验条件。
3 数据分析软件开发
由于采集器采集到的原始数据为famos 格式,为了避免读取数据的繁琐,提高有效性,选择了IMC 提供的Famos 平台进行软件开发。
根据结构化编程的思想将软件系统设计成几个模块,根据系统的整体需求,操纵稳定性道路试验分析系统分为:数据录入、试验分析模块、退出模块[14]如图4 所示。
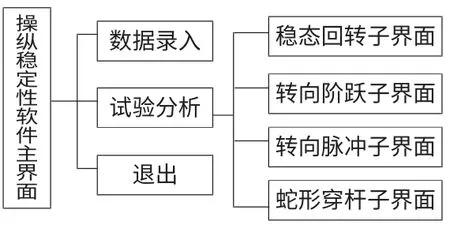
图4 操纵稳定性分析系统总体结构图
其中稳态转向子程序又可以分为:前处理模块,参数输入模块,结果计算模块,数据保存模块。
转向阶跃分析子程序可以分为:前处理模块,零位校正模块,图形显示模块,波形截取模块,结果计算模块,生成报告模块。
转向脉冲子程序可以分为:前处理模块,零位校正模块,图形显示模块,波形截取模块,频谱计算模块,生成报告模块。
蛇形穿杆子程序可以分为:前处理模块,零位校正模块,参数输入模块,结果计算模块,生成报告模块。
软件的结构设计后,即进行各底层子模块的详细设计,以程序流程图(图5)的形式表现出来。

图5 数据分析处理程序流程图
4 测试系统应用
4.1 操纵稳定性道路试验
参照GB/T 6323—1986《汽车操纵稳定性试验方法》,结合ATV 的实际特点进行操纵稳定性试验。试验选用以上所述测试系统,该测试系统试验前在加速度振动台上进行标定[15]。
试验时天气晴好,车辆技术状况符合试验要求,驾驶员体重在70 kg 左右,乘骑人员为专职试车员,经验丰富。试验路面等级等同于B级路面。具体试验方法按前述评价方法进行。标定好传感器,将车速传感器,角速度陀螺仪绑在车架尾部,并确保在车身纵向中心线位置。为了方便脱机采样,设置好外触发,并将开关由驾驶员控制采样开始,采集试验阶段的横摆角速度信号和车速信号。采样时间250s,如图6 所示。

图6 操纵稳定性试验仪器设备现场图
4.2 试验结果及分析
1)稳态回转试验。进行某方向试验重复3 次,结果如表1 所示。
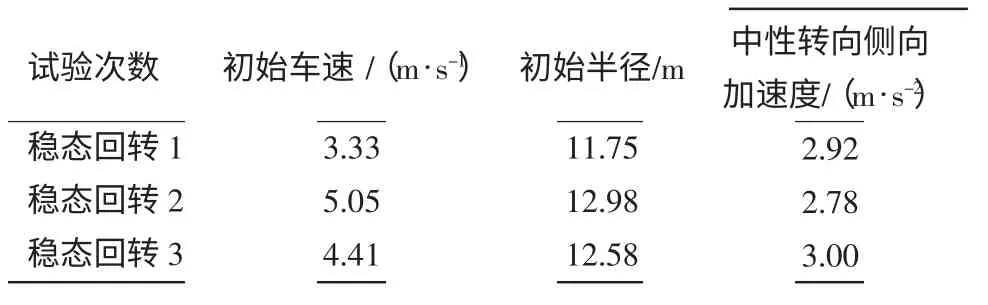
表1 某国产车稳态回转试验
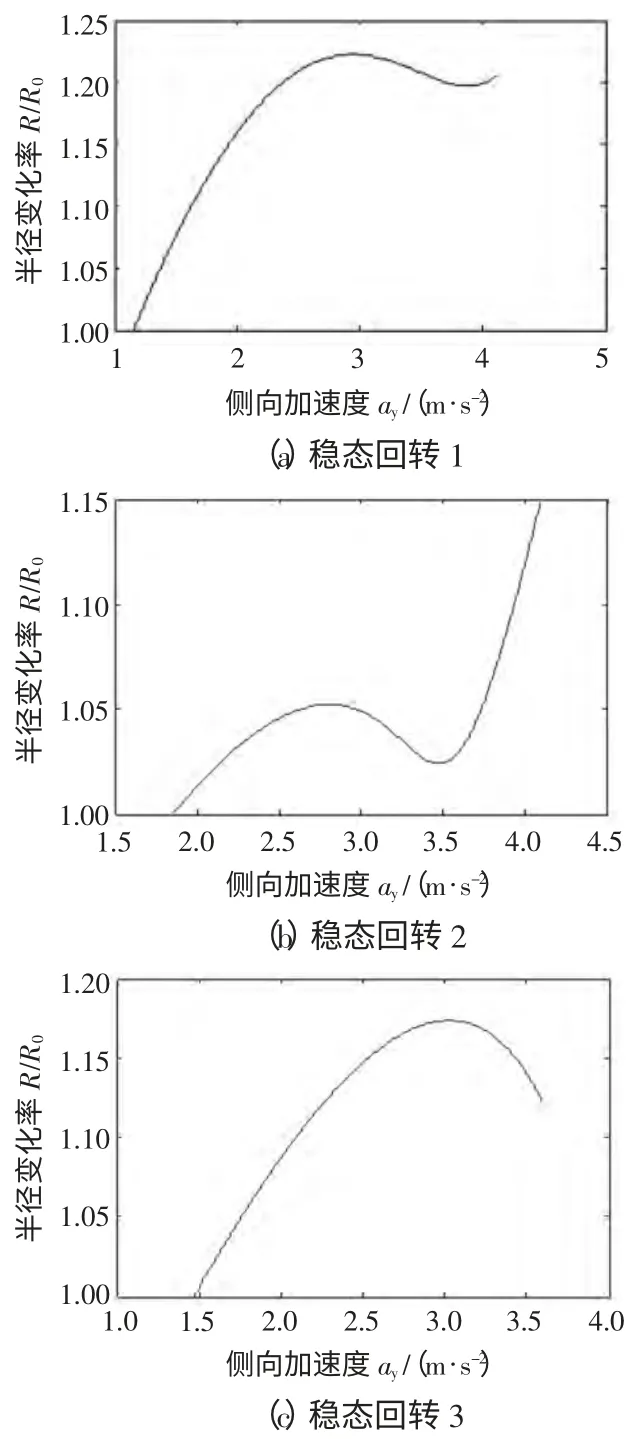
图7 汽车稳态转向特性图
汽车稳态转向特性图分别如图7 所示。
从图7 可以发现,该ATV 车先呈现不足转向,再呈现一定程度的过多转向。中性转向点出现在3 m/s2左右,且该车能达到的最大稳定测向加速度不超过4 m/s2,这个值相对于轿车来讲很低,这反映了四轮ATV 车稳态转向特性差[13]。
2)转向盘转角阶跃试验(表2)。
试验结果差距较大,需分析试验是否可靠。
3)脉冲试验。
从两款车的脉冲响应分析得到的谐振频率可以看出,进口车的谐振频率比国产车要好,这同驾驶员的主观操作感受符合。
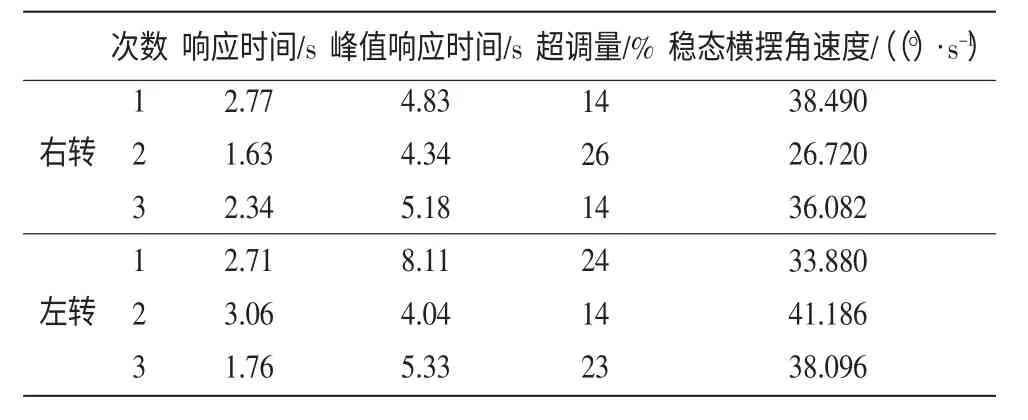
表2 某国产车阶跃数据结果
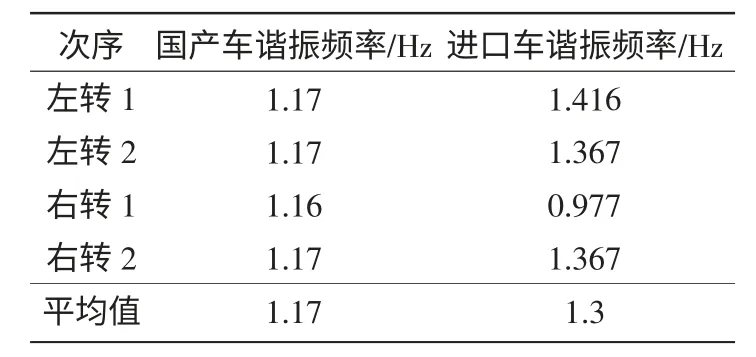
表3 国产/进口车转向脉冲试验结果
4)蛇形试验。
从表4中比较两车的平均横摆角速度,说明了进口车的操稳性优于国产车。
5 结 论
1)针对ATV 操纵稳定性试验评价,开发了便携式ATV 操纵稳定性测试系统,试验结果表明,测试分析系统可靠、稳定、满足要求。
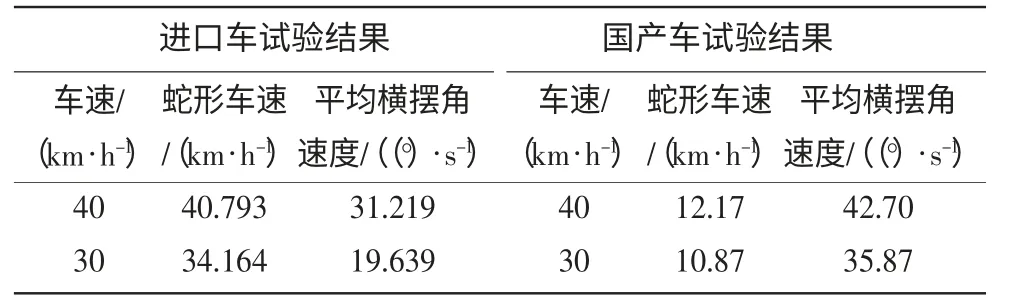
表4 进口车蛇形试验结果
2)该系统能定性定量的评价ATV 车辆的操纵稳定性,得到的评价指标能够较好地与乘骑人员的主观感觉吻合,表明所建立的ATV 操纵稳定性评价方法是合适的。
3)阶跃试验由于转角难控制,所以试验结果差距较大,因此后续改进工作是开发相应的仪器增加试验的重复性。
[1] 李陆山.建设推出JS400“悍虎”全地形车[J].摩托车技术,2005(5):30.
[2] 彭文中.基于ADAMS 的汽车操纵稳定性仿真分析及优化[D].长沙:湖南大学,2010.
[3] 赵荣远.某跑车操纵稳定性分析和优化[D].长沙:湖南大学,2008.
[4] 罗文水.基于ADAMS 的某跑车操纵稳定性和制动性仿真分析及优化[D].长沙:湖南大学,2007.
[5] 中国工业汽车总公司.QC/T 480-1999 汽车操纵稳定性指标限值与评价方法[S].
[6] Cooper G E.The Use of Pilot Rating in the Evaluation of Aircraft Handling Qualities[M].NASA TND-5153,1969.
[7] International Standard Organization.ISO 4138-2004 Passenger cars:Steady-state circular driving behaviour:Open-loop test methods[S].
[8] Weir D H,Richard J.Correlat ion an Evaluation of Driver/Vehicle Directional Handling Date[R].SAE paper780010,1978.
[9] 马涛锋,薛念文.汽车操纵稳定性的研究[J].农机化研究,2005,(3):278-280.
[10] 宗长富,刘蕴博,孔繁森.汽车操纵稳定性的模拟器闭环评价与试验方法[J].汽车工程,2001,23(3):205-208.
[11] 倪佑民.陀螺仪及其在汽车操纵稳定性试验中应用的若干问题[J].汽车技术,1975(1).
[12] 徐中明,叶芳,谭海伟,等.基于GPS 的车速传感器开发[J].传感器与微系统,2009(6):62-65.
[13] 叶芳,谭海伟.基于GPS 的车速传感器在汽车操稳性试验中的应用[J].贵州大学学报:自然科学版,2010(4):86-90.
[14] 倪佑铭.脉冲试验中转向输入有缺陷引起数据处理误差的初步判断[C]//清华大学交流论文,1993.
[15] 中国汽车技术研究中心标准化研究所.汽车整车试验方法标准大全[M].天津:中国汽车技术研究中心,1993.
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
装备制造技术(2018年8期)2018-10-17
天津教育·下(2018年9期)2018-07-13
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
解放军健康(2017年5期)2017-08-01
知识经济·中国直销(2016年2期)2016-11-07
探测与控制学报(2015年4期)2015-12-15
汽车维护与修理(2015年5期)2015-02-28
电力自动化设备(2013年11期)2013-09-18