
零速修正在GNSS/INS组合导航中的应用
2014-08-21 09:13徐海鑫孙付平苗岳旺
全球定位系统 2014年4期
徐海鑫,孙付平,刘 帅,苗岳旺,石 晶
(1.信息工程大学,河南 郑州 450001;2.西安测绘总站,陕西 西安 710054;3.河南省基础地理信息中心,河南 郑州 450003)
0 引 言
随着时代的发展,人们对载体的状态估计精度要求越来越高,依靠单一传感器进行导航、跟踪已不能满足这种要求。于是把两种或多种导航系统联合起来,应用信息融合理论,形成最优组合导航系统或最优容错组合导航系统,便成为导航定位技术的发展方向。GNSS与INS目前是最优的组合方式,具有良好的互补特性,将其组合可以获得稳定、精度好、数据更新率高的三维位置、速度、姿态信息[1-2]在GNSS/INS松组合导航中通常以GNSS接收机输出的位置、速度观测值并通过扩展卡尔曼滤波算法来限制INS导航误差的累积,GNSS接收机输出的位置、速度观测值总是含有误差,但是当载体处于静止状态时,载体速度始终为零,载体的位置也始终保持不变,如果此时以零速度作为观测值来代替GNSS接收机输出的速度,就相当于有精度极高的速度观测值来限制INS导航误差的累积,可显著改善静止状态下的GNSS/INS组合导航结果,这就是零速修正的思想[3]。国外学者在关于个人导航的文章中指出,利用三轴加速度计感知重力,在完全静止在地面上的这段时间应用零速修正技术,可以限制速度、位置误差的积累,并能改善俯仰角和横滚角的精度[4-6]。国内的学者提出动态零速修正技术,利用车体横向和垂直方向的速度为0作为约束条件,限制惯性器件误差积累[7]。
无论是哪种理论,都只是在惯导单独工作的情况下使用零速修正技术。在GNSS可用时,依然可以同时使用GNSS的位置和速度信息来构成卡尔曼滤波的观测值,对惯导的状态及器件误差进行修正。
GNSS/INS组合导航的信息融合方法通常采用卡尔曼滤波。本文中给出的是常规的扩展卡尔曼滤波,在GNSS/INS组合模式上,采用的是基于位置、速度观测值的组合模式,即松组合模式。零速修正技术,其原理也就是利用载体速度为零的条件,针对速度误差进行处理,此时使用松组合更为合适。
1 GNSS/INS松组合数学模型
GNSS/INS松组合是将GNSS、INS解算得到的位置、速度的差值作为扩展卡尔曼滤波器的观测值[8],对INS的导航误差和元器件误差进行估计,并反馈校正。
1)松组合状态方程
在当地导航坐标系中,松组合导航状态方程的线性化形式可以表示为

(1)

(2)

2)松组合量测方程
松组合的量测量是INS位置、速度同GNSS位置、速度的差值,所以在当地导航坐标系中,量测方程可以表示为
(3)
(4)
式中RM为子午圆半径;RN为卯西圆半径.
在松组合导航中,量测噪声协方差矩阵定义为
(5)
理想情况下,RG应为基于GPS导航滤波器的误差协方差,并根据GPS接收机的置信水平进行加权,但是这个信息实际上很少有接收机输出。通常的做法假设量测噪声的协方差矩阵为常值。
2 零速修正
传统的零速修正中,每有一次惯导输出就对惯导误差修正一次,这样带来的问题是惯性器件零偏估计不准确,并且计算量较大,本文则是在整秒点利用INS和GNSS观测值进行零速修正的,这也是本文的创新点。在零速修正之前,先要进行零速检测:根据惯导器件陀螺仪和加速度计三轴输出以及变化规律,判断载体是否静止。当载体处于静止状态下,由GNSS和INS解算出来的速度都应该为零,但实际并非如此,也就是说存在误差。本文采取两种方式对静止时的误差积累进行修正,即通过改变量测方程来实现。
第一种方案,与公式(6)的量测方程相比,同样使用位置、速度的差值作为观测值,唯一的不同是将GNSS的速度输出改为0,如上文所说,用零速度代替GNSS接收机输出的速度作为观测值,相当于用精度极高的速度观测信息限制INS导航误差的累积,可以在静止的条件下得到更好的导航结果,其观测方程的表达式为
(6)
第二种方案,与式(6)相比,去掉了位置观测量,仅使用速度作为观测值,GNSS的速度仍改为0,观测方程的表达式为
(7)
3 算例分析
为了验证载体在静止条件下使用零速更新技术,能够改善输出的导航信息,取一组车载GNSS/INS组合导航数据作为实验对象。实验数据由GNSS/INS组合导航系统采集。惯导系统的主要指标如表1所示。
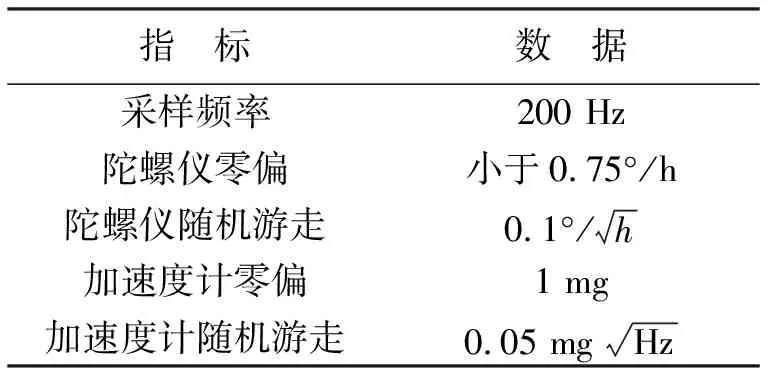
表1 惯导系统的主要技标
本次实验采集的数据时长1 200 s,实验环境为城市郊区,卫星的观测条件良好。取初始位置误差2 m,初始速度误差0.1 m/s,初始姿态误差0.05°,GPS位置噪声水平3 m、垂向5 m,速度噪声水平0.2 m/s,垂向0.5 m/s.为了能够准确评价本文所取模型的导航精度,本文将商业软件Inertial-Explorer的双差平滑结果作为基准与GNSS/INS松组合计算结果进行对比。跑车实验中,200 s到900 s载体处于静止状态。
分成两组不同的实验方案:
第一种方案:同时使用零速修正和GNSS位置、速度观测值。
第二种方案:只使用零速修正和GNSS速度观测值。
两种方案以及不使用零速修正松组合的RMS误差统计结果如表2所示,图1~图3示出了两种方案的位置、速度、姿态在当地水平坐标系下的误差结果。

表2 两种方案与非零速修正松组合RMS误差统计值
特别指出,这里给出的比较值是没有使用零速修正的松组合结果的RMS误差统计值。
从图1到图3及表2中可以得到如下结论:
1)从表2中可以知道,应用零速修正技术可以改善位置和速度的精度,但俯仰、横滚角的精度并没有得到太大提高,原因在于静止条件下,卡尔曼滤波对姿态的解算并不敏感。
2)从图中可以清楚的看到,只将速度的差值作为卡尔曼滤波的观测值,能得到比方案一更好的结果,在位置上以及北向的速度上更为明显,原因可能在于GNSS和INS解算出的位置存在误差,经过卡尔曼滤波,INS器件误差不能得到有效反馈。
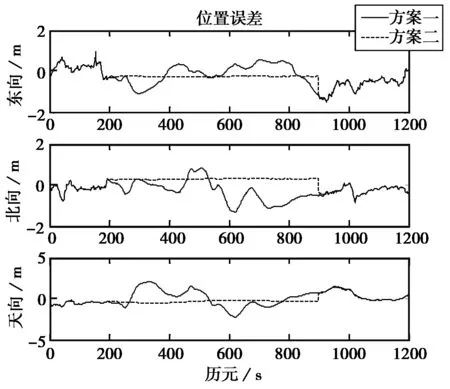
图1 两组方案的位置误差
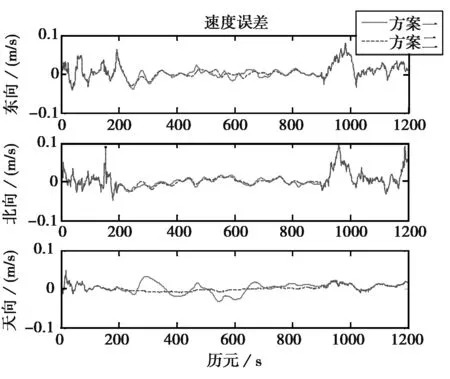
图2 两组方案的速度误差
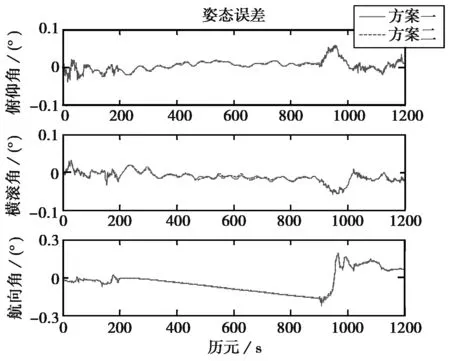
图3 两组方案的姿态误差
3)实验结果中位置和速度方向的精度改正十分明显,也充分说明了通过误差有效反馈校正,INS性能会有很大提高,并具有短时精度高的特点。
4 结束语
在GNSS/INS松组合中,因为是位置、速度层面的组合形式,所以应用零速修正,形式较为简洁,只需要更改相应的观测方程来实现。通过实测的数据解算可以看出,应用零速修正,可以有效的改善GNSS/INS组合导航中位置和速度的精度,对姿态角而言,其精度改善并不明显。在GNSS有效的情况下,也可以使用零速修正,并且在静止条件下可以得到比单纯松组合更好的结果。从实验结果可以清楚的看到,在静止条件下,由于航向角观测质量比较差,误差会不断增加,针对这一情况,如何限制航向角误差积累,是笔者下一步的研究重点。
[1]刘 帅.GPS_INS组合导航算法研究与实现[D].郑州:解放军信息工程大学,2012.
[2]刘 帅,孙付平,陈 坡,等.GPS_INS组合导航系统时间同步方法综述[J].全球定位系统,2012,37(1):57-60.
[3]高钟毓,王 进,董景新,等.惯性测量系统零速修正的几种估计方法[J].中国惯性技术学报,1995(2):24-29.
[4]GODHA S,LACHAPELLE G,CANNON M E. Integrated GPS/INS system for pedestrian navigation in a signal degraded environment[C]//ION GNSS,2006.
[5]KRACH B,ROBERSTON P.Cascaded estimation architecture for integration of foot-mounted inertial sensors[C]//In Position, Location and Navigation Symposium, 2008 IEEE/ION,2008:112-119.
[6]FOXLIN E. Pedestrian tracking with shoe-mounted inertial sensors[J].Computer Graphics and Applications, IEEE,2005,25(6):38-46.
[7]方 靖,顾启泰,丁天怀.车载惯性导航的动态零速修正技术[J].中国惯性技术学报,2008(3):17-20.
[8]付梦印,邓志红,闫莉萍.专著题名缺失[M].北京:科学出版社,2010.
[9]苗岳旺.SINS_GPS组合导航数据处理方法研究[D].郑州:解放军信息工程大学,2013.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
舰船科学技术(2022年10期)2022-06-17
Journal of Palaeogeography(2022年1期)2022-03-25
快乐语文(2021年35期)2022-01-18
北京航空航天大学学报(2021年7期)2021-08-13
数字海洋与水下攻防(2020年5期)2021-01-04
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年9期)2017-12-18
摄影之友(影像视觉)(2017年1期)2017-07-18
