5 t/30 t双钩桥式起重机的结构设计与多功能驱动控制实现
2014-09-04 09:26修学强
中国铸造装备与技术 2014年2期
修学强
(陕西国防工业职业技术学院,陕西西安 710300)
1 总体结构设计
起重机械主要用于装卸和搬运物料,是现代化生产的重要设备。它不仅广泛应用于工厂、矿山、港口、车站、建筑工地、电站等生产领域,而且也应用到人们的生活领域。使用起重运输机械,能减轻工人劳动强度,降低装卸费用,减少货物的破损,提高劳动生产率,是实现生产过程机械化和自动化不可缺少的机械设备。
本文结合生产实际要求设计了一种5 t/30 t的桥式起重机,该起重机机由工作机构、工程材料和动力系统三部分组成的,设计结构如图1、2所示。
(1)工作机构
该起重机的工作机构由起升、运行和变幅机构组成。起升机构是升降重物的机构,它是起重机械最主要的机构,该起重机械有两套起升机构,分别为升降重物能力最大的主钩(承载质量30 t)和承载质量为5 t的副钩。运行机构是使起重机械或起重小车行走的机构,该起重机在设计时保留了大车(最长行程)和小车(最短行程)两个行走机构。变幅机构是使起重机械臂架倾角变化,改变幅度的机构。

图1 5 t/30 t的桥式起重机

图2 5 t/30 t的桥式起重机行走机构
(2)工程材料
工程材料主要指桥式起重机的主要金属结构,该结构要保障设备良好的运行稳定性、抗震性和适当的刚度,需要对结构的静刚度等参数进行分析计算,在这里不加重点叙述。
(3)动力系统
动力装置是驱动起重机械运动的动力设备。它在很大程度上决定了起重机械的性能和构造特点。起重机械的控制系统包括操纵装置和安全装置。各种机构的起动、调速、改向、制动和停止,都是通过操纵控制系统来实现的。
2 电气控制系统结构
根据设计需要重新设计了一套电控系统,以保证设备的多段速控制、多位置操作和有效的安全保护控制,力求做到操作简单方便、控制全面有效、超程及时保护、耗损迅速断电。由于生产现场中桥式起重机大车桥架跨度比较大,在两侧分别装置两个规格相同的电动机M3和M4拖动,沿着长程(大车运行)轨道纵向的两个方向同速运行,小车移动机构由一台电动机M2拖动,沿着固定在大车桥架上的小车轨道做横向两个方向的运动,主钩升降由电机M5拖动,副钩升降由电机M1拖动,电气控制线路如图3、4所示。
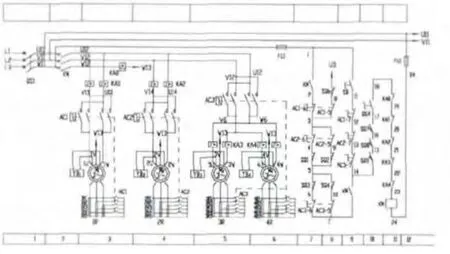
图3 电气控制图1

图4 电气控制图2
各移动部分均采用限位开关做行程限位保护,分别为主钩上升限位开关SQA,副钩上升限位开关SQB,小车横向限位开关SQ1、SQ2,大车纵向限位开关SQ3、SQ4。为保证桥式起重机在运行过程中的安全性,移动部件需在极限位置上安装挡铁,在任何一个挡铁触碰到行程开关时断开电路,停止设备运行,在一切检查就绪后重新通电使起重机正常运行。
起重机上的5台电机均采用电磁抱闸制动,这种制动方式结构简单,便于维修,出现问题能够及时更换处理,比起其它制动方式更加可靠,并能够减少由于过多的控制线路所造成的维修问题,其中主钩制动电磁铁YA5,副钩制动电磁铁YA1,小车制动电磁铁YA2,大车制动电磁铁YA3与YA4,YA1—YA4为两相,YA5、YA6为三相,当电动机通电时,电磁铁放开制动器,当电动机断电时,电磁铁制动。
3 电气多功能控制说明
(1)启动运行
操作人员按下启动按钮SB,主接触器KM吸合,使两相电源进入各凸轮控制器,一相电源引入到各电机定子,此时凸轮控制器手柄均在零位,电机不会运转
(2)凸轮控制器的多功能控制
大车、小车、副钩的控制分别采用三个凸轮控制器来进行,下面以大车控制过程为例来分析多功能调速控制的实现,小车与副钩的控制过程与大车相同。
转动凸轮控制器SA3手柄向后旋转1个角度后,处于位置1状态下,主触头V2-3M1、4M3、W2-3M3、4M1接通正反转连锁出头SA3-6接通,SA3-5、SA3-7 断开,电机 M3、M4 接通电源,YA3、YA4 通电,制动器放开,此时转子串联了全部电阻,具有较大的启动转矩和较小的启动电流,大车以最低的转速慢慢向后运行。
再转动凸轮控制器SA3手柄向后旋转1个角度后,处于位置2状态下,转子电阻控制触头3R3、4R5接通,电机M3、M4转子各切除一段3R、4R中的电阻,电机转速略有升高。依次往后直到位置5状态,接触触头依次闭合转子电阻逐渐切除,电机转速逐渐升高,当转子电阻全部切除时,转速达到最高。
当凸轮控制器向前旋转时,其过程与上述正好相反,电机反向旋转,并随着向前旋转的档位逐渐加大,转子的转速也逐渐升高,直到获得最大转速,当操作手柄扳到零位时,全部断电,制动器开始制动,这样大车就可以拥有11段的调速控制。
(3)主令控制器的多功能控制
主钩电机是整个桥式起重机中最为重要的部分,是工作量最大,承载量最高的电机,所以主钩电机采用主令控制器来实现多功能调速控制。主钩运行有升降两个方向,上升控制与凸轮控制器基本相似,区别是它通过接触器来实现的。下降的过程则与凸轮控制器有明显的区别,主钩下降有6挡位置,“J、1、2”这三个档位为制动下降位置,防止在吊有重载下降时速度过快,电机处于反接制动状态,“3、4、5”这三个档位为强力下降位置,主要用于轻载时快速下降。
4 控制系统的PLC改造
为了更好的控制桥式起重机大、小车运行,主、副钩提升、下降重物及调速,解决起重机工作在断续状态操作频繁、通断次数较高、负载没有规律性、时轻时重、经常承受大的过载和机械冲击的问题,将PLC应用于起重机控制系统中,为了更好地克服这些缺点,提高运行可靠性,降低维护量,特对该桥式起重机的控制系统进行了基于西门子226的PLC改造,依然可实现上述的多功能调速控制,外部接线与地址分配等内容在此不详加叙述,具体程序控制过程见图5。

图5 PLC程序控制过程
5 结语
本设计可以顺利实现5 t/30 t双钩桥式起重机的多功能调速控制,在用PLC控制替代传统继电器控制系统的基础上,进一步改进和完善电气控制系统,安全性能更好,因而可以获得更好的应用。
[1]左鹏军.变频器及PLC在桥式起重机控制系统改造中的应用[J].机床电器,2007(10).
[2]王军伟.PLC变频调速在桥式起重机中的应用[J].机械工程与自动化,2011(4).
[3]刘超然等.桥式起重机在线协同设计系统研究[J].机械设计与制造,2013(9).
猜你喜欢
科学技术创新(2022年24期)2022-08-06
快乐语文(2020年36期)2021-01-14
装备制造技术(2020年1期)2020-12-25
快乐语文(2019年36期)2020-01-04
快乐语文(2019年30期)2020-01-04
中国特种设备安全(2019年7期)2019-09-10
建材发展导向(2019年5期)2019-09-09
制造技术与机床(2019年8期)2019-09-03
中国特种设备安全(2019年5期)2019-07-16
制造技术与机床(2017年5期)2018-01-19