基于驱动电流的水下热敏剪应力微传感器灵敏度研究*
2014-09-20 08:21朱鹏飞马炳和姜澄宇邓进军王云龙
传感器与微系统 2014年9期
朱鹏飞, 马炳和, 姜澄宇, 邓进军, 王云龙
(西北工业大学 空天微纳系统教育部重点实验室,陕西 西安 710072)
0 引 言
流体壁面剪应力是精确掌握壁面摩擦阻力的重要依据,是研究边界层流动状态的重要物理量,对新型航空航天飞行器、水中航行器减阻降噪、气动和水动性能的设计研究具有重要意义[1]。
基于MEMS技术研制的热敏式剪应力微传感器具有流场干扰小、阵列化、响应快等特点,能够达到传统测量装置如斯坦顿管、普林斯顿管、双向隔板等不能达到的流体壁面剪应力精确测量要求[2],为流体壁面剪应力测量提供了新的技术手段。
热敏式剪应力微传感器是基于热平衡原理来间接测量壁面剪应力的,可以分为恒流、恒温、恒压等工作模式,其中,恒流模式是最常用的一种工作模式。国内外的众多学者对恒流模式热敏剪应力微传感器做了研究,美国加州理工学院和加州大学洛杉矶分校联合研制了一种工作在恒流模式下的硅基微型热敏剪应力传感器,其灵敏度在剪应力为0.2 Pa时可以达到15 mV/Pa[3,4]。国内西北工业大学成功研制出柔性热膜式剪应力微传感器,并开发出了一种恒流驱动模式下的测量系统[5]。
本文在西北工业大学柔性热膜式剪应力微传感器基础上,研究了如何基于驱动电流来最大程度地提高传感器的灵敏度。通过实验验证了传感器灵敏度与驱动电流的关系。结合传感器水下工作时的最大安全工作温度,确定了其水下工作时的最大允许驱动电流。在保证传感器水下正常工作的前提下,使其灵敏度大幅提高。
1 理论分析
在恒流模式下,热敏式剪应力微传感器电压输出V与流速u满足以下关系[6]
(1)
其中,A,B为与速度无关的常数,它们与流体的热容、导热性及粘度等性质相关,n为与传感器敏感单元尺寸相关的常数,V0为传感器在零剪应力输入时的电压输出值。对于矩形水槽流动状态,流速u与剪应力τ满足以下关系[7]
(2)
其中,h和w分别为矩形水槽的高度和宽度,μ为流体的动力粘度。因此,结合式(1)和式(2)可以得到热敏式剪应力微传感器电压输出V与剪应力τ的关系
(3)

对公式(3)求导就可以得到热敏式剪应力微传感器在不同剪应力τ输入下的灵敏度S值[8]
(4)
因为τ≥0,n≤1,所以,由公式(4)可知随着剪应力增大,传感器灵敏度会降低。但是,随着剪应力输入的减小,传感器探头表面强制对流换热会减弱,从而其工作温度升高。由此可知,在零剪应力输入下,传感器的工作温度将会达到最大。所以,通过静水中的I-V特性测试实验来确定热敏式剪应力微传感器在水下工作的最大允许驱动电流。
2 确定最大允许驱动电流
在恒流模式驱动下,增大驱动电流可以有效提高剪应力微传感器的灵敏度,提高传感器的测试性能[9],同时也会增大传感器探头的工作温度。尤其是在水下测量时,过高的工作温度会在传感器探头表面产生气泡,从而影响传感器的正常工作。为了确定热敏式剪应力微传感器在水下工作时的最大允许驱动电流,需要研究不同电流驱动下传感器在水下的工作温度情况。
本文选用如图1所示的柔性热膜式剪应力微传感器进行静水I-V特性测试(即将剪应力微传感器置于静水中,采集其在不同驱动电流下的电压值),得到了该传感器的I-V特性曲线,如图2所示。

图1 柔性热敏式剪应力微传感器[10]

图2 热敏式剪应力微传感器的I-V特性曲线
传感器工作在恒流模式下,通过欧姆定律可计算得到不同驱动电流下传感器的电阻值。另外,传感器的电阻值R与其对应工作温度T存在以下关系[7]
R=R0[1+α(T-T0)].
(5)
其中,α为热敏电阻器的电阻器温度系数,T0为参考温度,R0为参考温度为T0时的电阻值。所以,通过计算就得到了不同驱动电流下传感器的水下工作温度情况,如图3所示。

图3 不同电流驱动下热敏式剪应力微传感器的工作温度
热膜式剪应力微传感器在水下的工作温度通常比水温高出20~30 ℃左右,以避免在探头表面产生气泡。本文实验水温为18 ℃,所以,为了安全起见,选用38 ℃作为该传感器在水下工作的最高安全工作温度。结合图3所示数据就可以确定60 mA为该传感器在水下工作时的最大允许驱动电流。
3 灵敏度与驱动电流的关系
由第2节可知,要研究热敏式剪应力微传感器灵敏度与驱动电流的关系,需要首先研究输出电压随剪应力输入的变化规律,所以,本文通过微小型扁薄矩形标准剪应力发生装置对柔性热膜式剪应力微传感器进行了不同驱动电流下的电压—剪应力特性测试实验。实验装置原理图如图4所示,装置内的水流在扁薄矩形槽内形成纯剪切流,槽内流量Q与壁面剪应力τ又存在以下关系[9]
(6)
其中,Dh为水力学半径,A为水槽横截面积,φ(n)为扁薄矩形槽修正因子,μ为水的动力粘度系数,Q为水槽内单位时间流量。采集不同流量下对应的传感器输出电压值,通过计算就可以得到传感器的输出电压V与剪应力τ关系曲线。
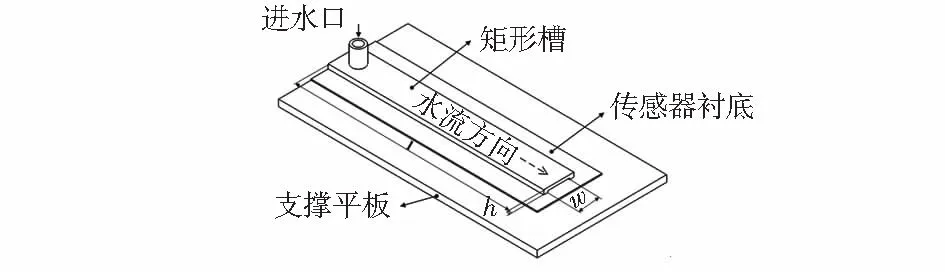
图4 剪应力发生装置示意图
由于60 mA为该传感器在水下工作时的最大允许驱动电流,所以,实验中选择30,40,50,60 mA作为该传感器的驱动电流,实验结果如图5所示。

图5 不同驱动电流下输出电压V与剪应力τ关系曲线
图5中各曲线对剪应力τ求导就可以得到不同驱动电流下该传感器灵敏度S与剪应力τ的关系,如图6所示。从图中可以看出:在相同的剪应力输入下,驱动电流越大,该传感器的灵敏度就越大。当剪应力输入为0.2 Pa时,30 mA的驱动电流使该传感器的灵敏度为3.7 mV/Pa,而最大允许驱动电流60 mA可以使该灵敏度提高到23.8 mV/Pa。
同时可以看出:随着剪应力输入的增大,传感器的灵敏度会不断降低,这也验证了第2节中的理论分析。
图7所示为不同电流驱动下该传感器工作温度随剪应力输入变化的曲线图。可以看出当驱动电流为60 mA时,该传感器的工作温度在安全工作温度范围内,这也验证了60 mA作为该传感器水下工作时的最大允许驱动电流是安全的。

图6 不同驱动电流下灵敏度随剪应力的变化
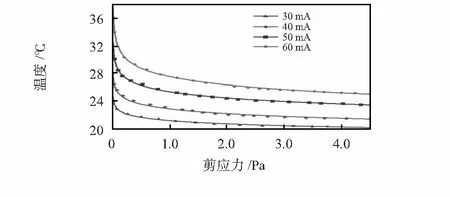
图7 不同驱动电流下传感探头工作温度与剪应力τ关系曲线
4 结 论
本文研究了如何基于驱动电流来最大程度的提高热敏式剪应力微传感器的灵敏度,理论分析了传感器灵敏度随剪应力输入的变化规律,研究了传感器灵敏度与驱动电流的关系,并通过电压—剪应力特性测试实验进行了验证。通过静水I-V特性测试实验确定了传感器水下工作时的最大允许驱动电流为60 mA,使剪应力输入为0.2 Pa时,传感器的灵敏度达到23.8 mV/Pa。
参考文献:
[1] Xu Yong,Jiang Fukang,Newbern S,et al.Flexible shear-stress sensor skin and its application to unmanned aerial vehicles[J].Sensors and Actuators A:Physical,2003,105(3):321-329.
[2] Padmanabhan Aravind.Silicon micromachined sensors and sensor arrays for shear-stress measurements in aerodynamic flows[R].Boston:ACDL Technical Reports,1997:1.
[3] Jiang Fukang,Lee Gwobin,Tai Yuchong,et al.A flexible micromachine-based shear-stress sensor array and its application to separation-point detection[J].Sensors and Actuators A: Physical,2000,79(3):194-203.
[4] Liu C,Tai Y C.Surface micromachined thermal shear stress sensor[C]∥Application of Microfabrication to Fluid Mechanics,American Society of Mechanical Engineers,Fluids Engineering Division(ASME-FED),Chicago,1994:9-16.
[5] 肖同新,马炳和,邓进军,等.基于柔性热膜传感器的流体壁面剪应力测量系统[J].传感器与微系统,2013,32(7):101-105.
[6] Jiang Fukang,Tai Yuchong,Ho Chiming,et al.Theoretical and experimental studies of micromachined hot-wire anemometer-s[C]∥1994 IEEE International Electron Devices Meeting(IEDM’94),San Francisco,1994:139-142.
[7] Xu Yong,Chiu Chenwei,Jiang Fukang,et al.A MEMS multi-sensor chip for gas flow sensing[J].Sensors and Actuators A:Physical,2005,121(1):253-261.
[8] 李晓莹,张新荣,任海果.传感器与测试技术[M].北京:高等教育出版社,2004:59-64.
[9] Xu Yong,Lin Qiao,Lin Guoyu,et al.Micromachined thermal shear-stress sensor for underwater applications[J].Journal of Micro-electro-mechanical Systems,2005,14(5):1023-1030.
[10] Ma Binghe,Ren Jinzhong, Deng Jinjun,et al.Flexible thermal sensor array on PI film substrate for underwater application-s[C]∥2010 IEEE 23rd International Conference on Micro-Electro-Mechanical Systems(MEMS),Hong Kong,2010:679-682.
猜你喜欢
煤气与热力(2022年2期)2022-03-09
煤气与热力(2021年12期)2022-01-19
汽车技术(2021年5期)2021-05-24
电脑爱好者(2021年5期)2021-03-10
照明工程学报(2020年1期)2020-06-16
中国惯性技术学报(2018年4期)2018-11-08
电子制作(2017年14期)2017-12-18
工业设计(2016年6期)2016-04-17
现代电子技术(2015年20期)2015-10-26
安徽农业科学(2015年21期)2015-10-21