胶囊内窥镜主动控制研究
2014-10-29 12:20叶波孙珍军邓超程兴国彭菊红张鸿海刘胜
湖北大学学报(自然科学版) 2014年1期
叶波,孙珍军,邓超,程兴国,彭菊红,张鸿海,刘胜
(1.华中科技大学机械科学与工程学院,湖北 武 汉430074;2.湖北大学物理学与电子技术学院,湖北 武 汉430062)
0 引言
胶囊内窥镜[1]用于检查消化道具有操作简单、检查方便、无创伤、无痛苦、无交叉感染等优点,填补了胃镜、肠镜检查的盲区,扩展了医生的消化道检查视野,尤其对人的可疑小肠病变具有很高的诊断价值,被医学界誉为21世纪内窥镜发展的革命与方向.但胶囊内窥镜的移动是被动地由胃肠道自然蠕动实现,不能受医生控制,不能对疑似病症反复进行观察,漏检率高,因此亟需解决胶囊内窥镜在肠道内的主动控制问题.
目前已经有不少用于胶囊内窥镜的主动控制技术.电刺激法通过刺激肌肉收缩的方式推进胶囊内窥镜的行进[2],但电刺激对肠道的损伤是未知的.Swain P等人利用手持式外部永磁体控制胶囊内窥镜在人体食管和胃中的运动[3],但不能精确和反复控制胶囊内窥镜检测特定区域.有学者提出利用带有永磁体的机械手来控制带有磁壳的胶囊内窥镜的自由运动[4-5],但设备昂贵,操作复杂,不利于推广.也有学者提出用亥姆霍兹线圈产生的旋转磁场主动控制胶囊内窥镜[6],但亥姆霍兹线圈产生的电磁辐射对人体会产生伤害.还有学者提出将形状记忆合金(SMA)的蚯蚓状微型机器人用于主动式胶囊内窥镜中[7],但SMA装置在使用时需要频繁加热和冷却,临床应用时,由于胃肠道是封闭的,该装置的冷却速度将非常慢.另一种用于胶囊内窥镜的仿生机器人是以无线供电方式驱动的桨状微型机器人[8],尽管已开发了多种无线供电系统并取得了一些进展[9-11],但无线供电仍是主动控制式胶囊内窥镜未来发展的技术瓶颈.另外,仿生机器人的尺寸在人体胃肠道中显得较大.
本文中分析了前人的主动控制技术,在磁导航技术的基础上进行改进,提出一种新的基于单片机的手持式机构主动控制磁性螺旋型胶囊内窥镜的方法,介绍其工作原理、组成结构、软件流程及其在猪小肠内的离体实验.
1 基于单片机的手持式机构对磁性螺旋型胶囊内窥镜的主动控制
磁导航技术可对胶囊内窥镜提供简单、可靠和无线的主动控制方式,本文中结合手持式磁导航技术和旋转磁场控制表面有螺旋结构的胶囊内窥镜的优点,提出了一种新的基于单片机控制的手持式控制机构主动控制表面有螺旋结构的磁性胶囊内窥镜.
1.1 手持式机构原理 图1为手持式机构主动控制磁性螺旋型胶囊内窥镜运动的原理示意图.该机构由步进电机、步进电机驱动电路、单片机和外围输入输出电路以及连在步进电机上的永磁体组成,永磁体为轴向充磁.磁性螺旋型胶囊内窥镜包含一个商用胶囊内窥镜、一个圆柱状磁壳和表面螺旋结构.由于磁壳为径向充磁,因此磁性螺旋型胶囊内窥镜将随着由手持式机构上的永磁体所产生的外部旋转磁场同步旋转,如图2所示.磁性螺旋型胶囊内窥镜根据其旋转方向的不同而产生前进或后退的运动.

图1 手持式机构主动控制磁性螺旋型胶囊内窥镜运动的原理示意图

图2 磁性螺旋型胶囊内窥镜与永磁体同步旋转示意图
1.2 手持式机构的组成 图3为手持式机构的实物图,图4为该机构的组成框图.手持式机构通过旋转永磁体(铷铁硼材料,表面最高磁感应强度约为4 490G,轴向充磁,尺寸为50mm×50mm×25mm的立方体)产生旋转磁场,旋转永磁体通过铝制夹具安装在步进电机的轴上.单片机(AT89C52)控制步进电机的启动/停止和旋转速度,通过切换驱动电路方向控制端的高低电平控制步进电机的旋转方向,步进电机的旋转速度在0.1~10.0r/s范围内变化,旋转速度值由LED数码管显示,4个控制按钮分别控制步进电机的启动/停止、加速、减速、顺时针/逆时针旋转.单片机的程序代码在Keil上进行调试,程序流程图如图5所示,所有硬件电路在制备前均在Proteus上进行了仿真.

图3 手持式机构实物图
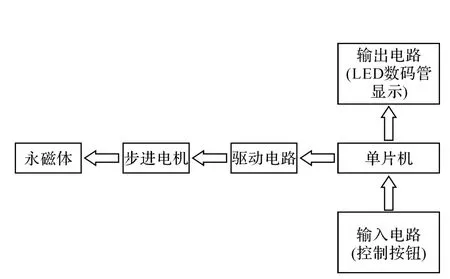
图4 手持式机构组成框图
1.3 磁性螺旋型胶囊内窥镜 图6为磁性螺旋型胶囊内窥镜的实物图.它包含一个商用胶囊内窥镜(杭州华冲科技有限公司制造,长28.0mm,直径为13.4mm).胶囊内窥镜表面的磁壳为铷铁硼永磁体(径向充磁,等级:N52).磁壳表面的螺旋结构由黄铜丝绕制而成,黄铜丝直径为1mm,螺旋线螺距为15mm.

图5 单片机程序流程图
1.4 猪小肠内的离体实验 图7为猪小肠内的离体实验现场图,实验中磁性螺旋型胶囊内窥镜被置于一段新鲜的猪小肠中,猪小肠放置在一个托盘中,肠内的食物残渣在实验前已经用水清理干净.实验检测了磁性螺旋型胶囊内窥镜在手持式机构控制下在猪小肠内的直线运动速度.图8为磁性螺旋型胶囊内窥镜运动速度与步进电机旋转速度的关系曲线图.横坐标vs表示手持式机构中步进电机的旋转速度,纵坐标vc表示磁性螺旋型胶囊内窥镜的运动速度.从图中可以看出两者基本呈正比关系,这说明可以通过改变步进电机的旋转速度来控制磁性螺旋型胶囊内窥镜的运动速度.
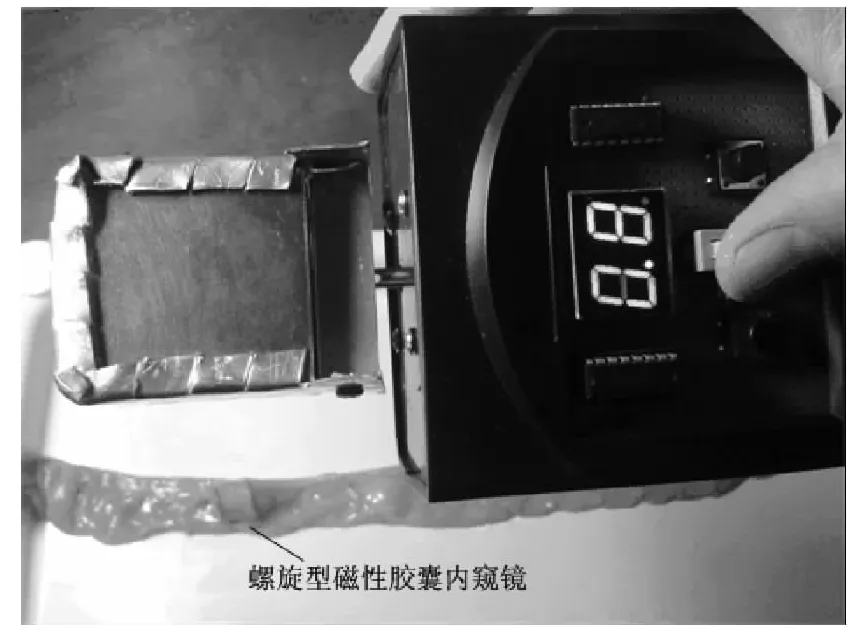
图7 实验现场图
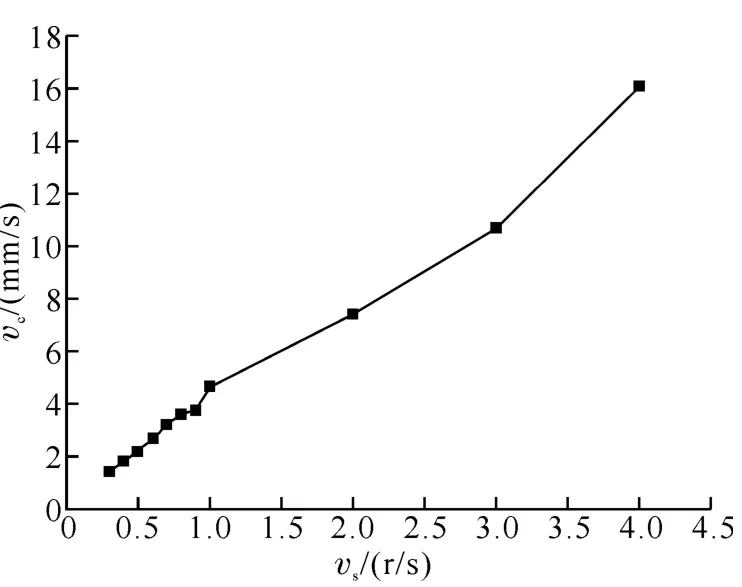
图8 磁性螺旋型胶囊内窥镜运动速度与步进电机旋转速度的关系曲线图
实验结果表明,该手持式机构能自如地控制磁性螺旋型胶囊内窥镜在猪小肠内快速的前进/后退运动,且控制距离超过170mm.该机构采用的是单边控制方式,与其他已有的磁导航系统相比,该手持式机构操作简单,性价比高.另外,磁性螺旋型胶囊内窥镜的制备简单,且不需要改变已有商用胶囊内窥镜的内部结构.
2 结束语
本文中提出一种新的基于单片机的手持式机构,用于主动控制磁性螺旋型胶囊内窥镜,并介绍了利用该机构主动控制胶囊内窥镜在猪小肠内运动的离体实验.实验结果表明,该手持式机构主动控制磁性螺旋型胶囊内窥镜的性能良好,基于单片机的手持式机构主动控制磁性螺旋型胶囊内窥镜运动的方法新颖独特,相比于其他现有的方法具有操作简单、性价比更高的优点,该手持式机构有望用于未来的实际临床应用中.
[1]Iddan G,Meron G,Glukhovsky A,et al.Wireless capsule endoscopy[J].Nature,2000,405:417.
[2]Mosse C A,Mills T N,Appleyard M N,et al.Electrical stimulation for propelling endoscopes[J].Gastrointest Endosc,2001,54:79-83.
[3]Swain P,Toor A,Volke F,et al.Remote magnetic manipulation of a wireless capsule endoscope in the esophagus and stomach of humans(with videos)[J].Gastrointest Endosc,2010,71:1290-1293.
[4]Carpi F,Pappone C.Magnetic maneuvering of endoscopic capsules by means of a robotic navigation system[J].IEEE Trans Biomed Eng,2009,56:1482-1490.
[5]Gao M,Hu C,Chen Z,et al.Design and fabrication of a magnetic propulsion system for self-propelled capsule endoscope[J].IEEE Trans Biomed Eng,2010,57:2891-2902.
[6]Sendoh M,Ishiyama K,Arai K I.Fabrication of magnetic actuator for use in a capsule endoscope[J].IEEE Trans Magn,2003,39:3232-3234.
[7]Kim B,Lee M G,Lee Y P,et al.An earthworm-like micro robot using shape memory alloy actuator[J].Sensors and Actuators,A:Physical,2006,125:429-437.
[8]Kim H M,Yang S,Kim J,et al.Active locomotion of a paddling-based capsule endoscope in an in vitro and in vivo experiment[J].Gastrointest Endosc,2010,72:381-387.
[9]Pan G,Xin W,Yan G,et al.A video wireless capsule endoscopy system powered wirelessly:design,analysis and experiment[J].Measurement Science and Technology,2011,22:1-9.
[10]Miura H,Arai S,Kakubari Y,et al.Improvement of the transcutaneous energy transmission system utilizing ferrite cored coils for artificial hearts[J].IEEE Trans Magn,2006,42:3578-3580.
[11]Ryu M,Kim J D,Chin H U,et al.Three-dimensional power receiver for in vivo robotic capsules[J].Medical and Biological Engineering and Computing,2007,45:997-1002.
猜你喜欢
中国交通信息化(2022年2期)2022-04-26
现代仪器与医疗(2022年1期)2022-04-19
现代仪器与医疗(2021年6期)2022-01-18
现代仪器与医疗(2021年4期)2021-11-05
微特电机(2021年1期)2021-01-25
仪表技术与传感器(2020年5期)2020-06-11
电子制作(2019年19期)2019-11-23
电工技术学报(2015年6期)2015-11-15
广西科技大学学报(2015年4期)2015-02-27
中国卫生标准管理(2015年3期)2015-01-27