
有源电力滤波器指定次谐波补偿技术研究
2014-12-14 07:00耿运涛
邵阳学院学报(自然科学版) 2014年1期
王 璐,唐 杰,耿运涛
(邵阳学院机械与能源工程系,湖南邵阳422000)
0 引言
随着电力电子技术的飞速发展,大量非线性负荷产生的谐波对电网的影响日趋严重[1].公用电网中的谐波源主要由各种电力电子装置,荧光灯,电力变压器,工业用电弧炉等产生.APF是一种用于动态补偿谐波和无功的新型电力电子装置,因其优异的补偿性能现已得到了广泛的重视和研究,利用APF补偿谐波将是未来发展的一个趋势[2].
电流检测和跟踪控制是影响APF精确、稳定工作的重要条件[3-4].目前检测谐波的方法主要有模拟低通滤波器法、基于FFT的检测法、基于Fryze功率定义的检测法、瞬时无功功率检测法,近年来还有学者提出小波变换法、自适应检测法等.文献[5]表明当电网参数发生变化时,采用模拟低通滤波器法检测效果明显变差.文献[6]表明基于FFT的检测法存在着频谱混叠、频率分辨能力差、栅栏效应及频谱泄漏、相位误差等问题.文献[7]表明基于Fryze功率定义的谐波检测法至少需要一个电源周波的时间才能得到瞬时有功电流,因此实时性较差.目前工程上应用比较广泛的检测技术为基于瞬时无功功率理论检测法,在三相电网电压畸变的情况下基于瞬时无功功率理论的ip-iq法仍能较准确地检测出电网谐波,因此论文在ip-iq检测法的基础上做出相应改进,设计出一种指定次谐波检测法.为满足APF输出的补偿电流能够准确实时地跟踪指令电流的变化,控制器一直是研究的热点.目前较常用的有传统PI控制、滞环控制、重复控制等.PI具有算法简单、稳定性好、可靠性高等特点,能够对直流信号实现稳态无静差跟踪,已被广泛应于工业控制中,但对交流给定量的控制存在不足[8].滞环控制易受系统参数影响,开关频率波动较大,因此它的抗干扰能力较弱[9].重复控制存在一个周期的时间延迟,因此实时性不太理想[10].鉴于以上缺点,论文采用PR控制器,该控制策略参数易整定且减少了坐标变换次数,同时克服了传统PI无法实现交流给定信号稳态无静差的缺点.论文的最后给出了基于PR控制器的APF仿真结果,仿真结果表明基于PR控制的APF能快速准确补偿电网中的指定次谐波,有效补偿谐振频率处的指定次谐波.
1 指定次谐波电流检测方法
指定次谐波电流检测框图如图1所示,对于三相对称系统,ia,ib,ic三相瞬时电流经CLARK变换变为两相静止坐标系αβ下的 iα,iβ.变换矩阵为

然后iα-iβ经过Cn变换,其变换矩阵为

式(2)中n=3k+1时取上符号,n=3k-1时取下符号,下同.其中 sinnwt,-cosnwt由PLL和正余弦发生电路得到.PLL为锁相环,其作用为锁住a相电网电压ea的相位.由式(2)可知,n次谐波以n倍的ω(基波角频率)旋转变为直流量,基波和其他次谐波相对于n倍的基波角频率旋转变为交流量,通过LPF(低通滤波器)之后,交流分量被滤除,反变换之后即为要检测的谐波指令电流.反变换矩阵为

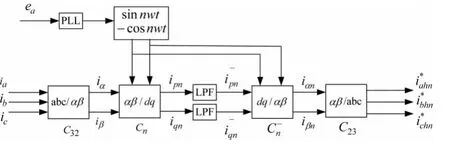
图1 指定次谐波电流检测框图Fig.1 The block diagram of specified harmonics current detection
2 比例谐振控制器设计
2.1 PR控制器的性能分析
传统PI控制器传递函数为

式中kp为比例增益,ki为积分增益.由传递函数可知,传统PI在电网基波频率处的增益为有限值.因此当给定信号为交流时,对于传统PI控制的APF系统存在稳态跟踪误差.
为了克服传统PI控制器的不足,论文采用PR控制器,在αβ静止坐标系下直接对交流信号进行控制.PR控制器的传递函数为

式中w0为谐振频率,kp为比例增益,kr为积分增益.为了分析PR控制器的性能,取kp=2,kr=9,w0=314rad/s,此时bode图如图2所示.
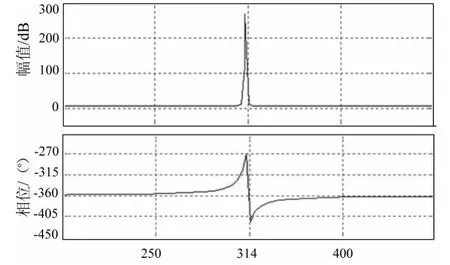
图2 PR控制器bode图Fig.2 The bode graph of PR controller
由图2可知PR控制器在基波频率处的增益趋向无穷大,可以实现交流给定信号的稳态无静差跟踪.但在实际情况中,PR控制器在指定次频率处有一个无穷大的增益,用模拟或数字电路很难实现.在电网电压频率偏移时,指定次频率之外的增益非常小,不能有效抑制电网中的谐波[11].
2.2 准PR控制器的性能分析
基于以上问题,一种容易实现的准PR控制器被提出,其传递函数为

式中w0为谐振频率,kp为比例增益,kr为积分增益,wc为截止频率.取 kp=2,kr=9,w0=314rad/s,wc=5 和10,其 bode图如图3所示.

图3 准PR控制器bode图Fig.3 The bode graph of quasi PR controller
从图3可以看出,加入了截止频率wc的准PR控制器,与图2相比带宽有所增加,而wc对谐振频率处的增益没有影响,因此合理选择wc可以降低频率偏移造成控制器增益骤减的缺陷,有效提高了谐波检测的精确性.kp对系统的增益、稳定性、快速响应性等都有重要的影响,调节kr可以改变控制器在谐振点处的增益.图4给出了α轴的PR控制器框图,在三相三线制系统中,谐波次数主要为 6k±1 次(k=1,2,3,…),以7次谐波为例,从负载中检测的电流作为指令电流,与APF输出的电流iα相比较后作为PR控制器的输入,uα7为采用PR控制器输出的参考电压,经过PWM发生电路产生主电路中开关管的驱动信号.根据文献[12]详细介绍的 PR控制器参数设计方法,补偿5次谐波时的控制器参数为:kp=80,kr=100,wc=8,补偿 7 次谐波时的控制器参数为:kp=80,kr=100,wc=15.如果要补偿其他次谐波,只需将各次谐波的PR控制器并联后相加即可,方便的实现了指定次谐波补偿.
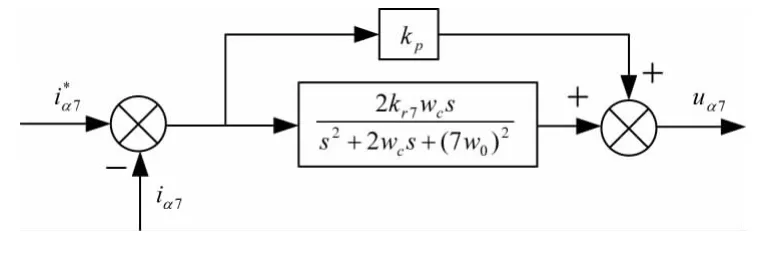
图4 准PR控制框图Fig.4 The block diagram of quasi PR controller
3 仿真结果与分析
3.1 仿真模型的建立
为了验证所采用的指定次谐波检测法和PR控制器设计的正确性和有效性,对系统进行仿真分析.仿真软件采用MATLAB7.3.0,搭建基于 PR 控制器的三相三桥臂APF模型,谐波源为带阻性负载的三相不可控整流桥,直流侧电源采用蓄电池直接供电.具体参数如表1所示.

表1 APF仿真模型参数Tab.1 APF simulation model parameters
3.2 补偿指定次谐波分析
仿真系统三相对称,仿真波形均以A相为例.图5,6为A相负载电流波形及其频谱,从图6可以看出谐波总畸变率20.44%,负载电流中含有大量的5、7次谐波.下面分别以补偿单次谐波和某几次谐波为例,给出仿真试验波形.单独补偿7次谐波时,图7给出了检测负载中7次谐波电流在α轴上的仿真波形,0.03s时波形基本达到稳定状态,图8为7次谐波指令电流FFT,可以看出检测效果较好.补偿5,7次谐波时,图9给出了0.06s时投入APF电网侧的电流波形,从图中可以看出在一个电源周期左右APF进入稳定工作状态,动态响应性较好.其频谱如图10所示,5、7次谐波从负载侧的 7.81A、2.53A 降到0.09A、0.03A,谐波总畸变率降为 3.07%,指定次谐波补偿效果较好.
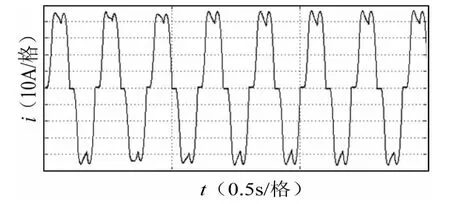
图5 A相负载电流Fig.5 The load current of phase A
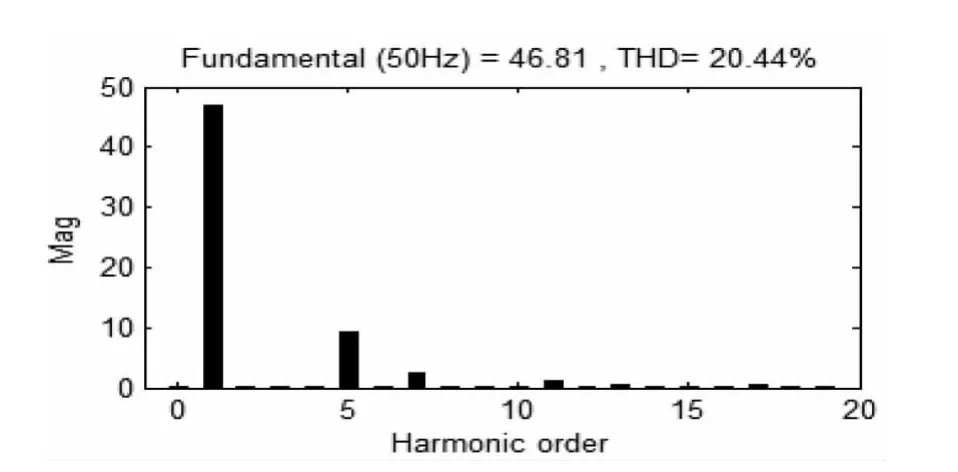
图6 A相负载电流FFTFig.6 The FFT of phase A load current

图7 α轴7次谐波电流指令Fig.7 The α axis of 7 harmonic directive current
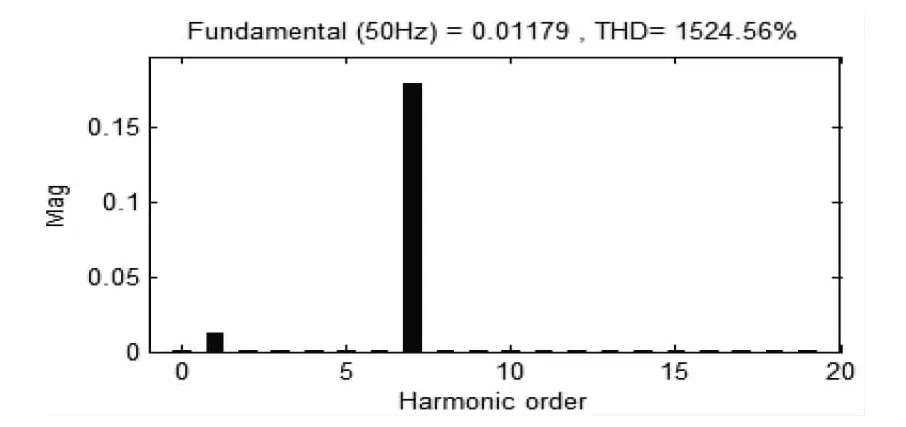
图8 α轴7次谐波电流指令FFTFig.8 The α axis FFT of 7 harmonic directive current

图9 补偿5、7次谐波后电源电流Fig.9 The power current of after 5、7 harmonic current compensation
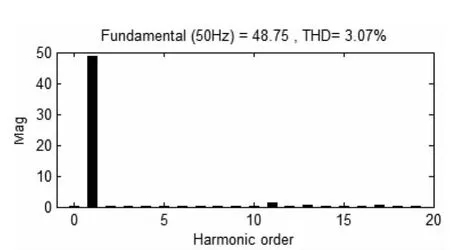
图10 补偿5、7次谐波后电源电流FFTFig.10 The power current FFT of after 5、7 harmonic current compensation
3.3 负载切换时补偿指定次谐波分析
图11给出了在1.4s时负载由10Ω变为5Ω,从波形可以看出,在负载切换过程中,不到一个电源周期,APF就已工作在稳定状态.其频谱如图12所示,1.6s时5、7次谐波从负载侧的 11.04A、4.04A 降到0.1A、0.06A,谐波总畸变率降为 2.26%,满足低压电网谐波治理要求.
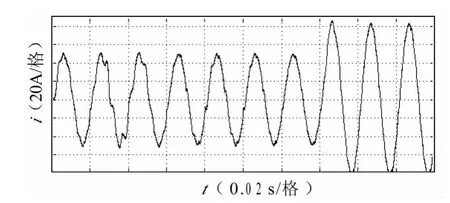
图11 补偿5、7次谐波加扰动后电源电流Fig.11 The power current of after 5、7 harmonic current and disturbance compensation
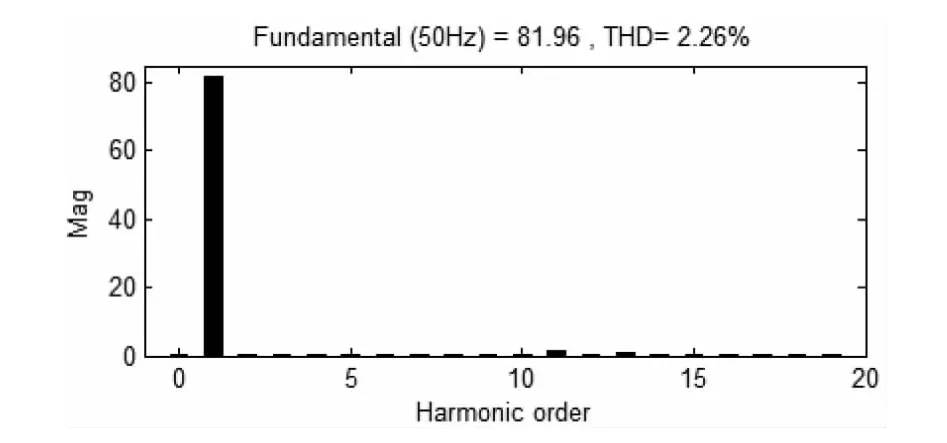
图12 补偿5、7次谐波加扰动后电源电流FFTFig.12 The power current FFT of after 5、7 harmonic current and disturbance compensation
4 结论
APF是一种补偿谐波的新型电力电子装置,其检测和控制部分是保证APF稳定高效工作的前提.论文从补偿指定次谐波的目的出发,论述了任意整数次谐波检测的法原理,采用基于PR控制器的APF在αβ静止坐标系下实现对交流给定信号直接控制的方法.理论和仿真结果表明,该检测方法能够较好的检测出电网电流中的指定次谐波,PR控制器可使APF输出的补偿电流较快的跟踪指令电流,加入扰动时APF的动态响应快且稳定性好.在具体的硬件平台上采用数字信号处理器DSP实现电流检测和PR控制器将是下一步研究的重点工作.
[1]王兆安,杨君,刘进军,王跃.谐波抑制和无功功率补偿[M].北京:机械工业出版社,2005.
[2]尹慧,许彦.有源滤波器的研究现状及前景展望[J].电力电容器与无功补偿,2010,31(3):27-28.
[3]郭伟峰,徐殿国,武建,王立国.LCL有源电力滤波器新型控制方法[J].中国电机工程学报,2010,30(3):42-43.
[4]同向前,王党帅,赵叶艳.一种新型谐波与无功电流检测方法[J].电力系统及其自动化学报,2008,20(5):112-113.
[5]吕润如.电力系统高次谐波[M].北京:中国电力出版社,1998.
[6]帅定新,谢运祥,王晓刚.电网谐波电流检测方法综述[J].电气传动,2008,38(8):19-20.
[7]刘继权,张茂松.基于瞬时无功功率理论的新型谐波检测法[J].电测与仪表,2012,49(562):29-30.
[8]朱荣伍,伍小杰,杨艳,于月森.采用比例谐振调节器的单相电压型PWM整流器[J].高电压技术,2010,36(8):2096-2097.
[9]亓迎川,胡荣强,王杰,祁承超.基于比例谐振调节器的恒压恒频逆变器研究[J].电工电能新技术,2011,30(1):52-53.
[10]徐保友,黄挚雄.基于改进比例谐振控制的有源电力滤波器研究[J].低压电器,2011,(24):35-36.
[11]陆启宇,王丰华,金之俭,李清.无死区模糊准PR控制算法在变频恒流源中的应用[J].东南大学学报(自然科学版),2011,41:80-81.
[12]周娟,张勇,耿乙文,伍小杰.四桥臂有源滤波器在静止坐标系下的改进PR控制[J].中国电机工程学报,2012,32(6):115-116.
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
电子制作(2019年19期)2019-11-23
电子制作(2018年19期)2018-11-14
当代医药论丛(2017年22期)2017-04-12
西南交通大学学报(2016年3期)2016-06-15
通信电源技术(2016年4期)2016-04-04
电源技术(2015年2期)2015-08-22
城市轨道交通研究(2015年3期)2015-02-27
电测与仪表(2014年6期)2014-04-04
电测与仪表(2014年17期)2014-04-04
