滞环PID控制在蓄电池充电器应用中的研究
2014-12-22 08:17林知明魏九妹
华东交通大学学报 2014年5期
林知明,魏九妹,刘
(华东交通大学电气与电子工程学院,江西 南昌330013)
电动汽车研究进展极为迅猛,电动汽车蓄电池充电技术是电动汽车的关键技术之一。动力蓄电池是电动汽车的重要组成部分,为电动汽车提供了主要的动力需求[1]。蓄电池的成本是整个电动汽车成本的主要组成部分,由于蓄电池能量密度高、功率密度高、循环使用寿命长以及充放电性能好等特点,也推动了动力蓄电池在电动汽车中的发展[2]。目前蓄电池充电方式多种多样但是其主流仍是采用恒流恒压充电方式,这种恒流恒压的充电方式满足马斯电池最佳充电曲线,能够使得蓄电池不会出现充电不足或过冲,延长了电池的使用寿命,并大大缩减充电时间[3]。本文所设计的蓄电池充电器是以恒流方式充电,因此,采用一种有效控制算法获得稳定的充电电流至关重要。
在电力电子变换器的运行过程中,为了使系统得到相对稳定的输出电流以及良好的抗干扰能力,即为了提高系统的鲁棒性、适应性和稳定性,选择适当的控制方法至关重要。传统PID控制由于其结构简单、参数易调和良好的适应能力,被广泛推广应用[4-5]。本文所设计的充电器具有双向传递能力,并且充电器要有快速切换功能,这就要求输出的电流响应速度快,稳定性好,而传统PID 控制方法很难达到理想的控制效果,因此提出了具有较强鲁棒性的滞环PID的控制方法。充电器的主电路结构采用的是移相全桥DC-DC(直流-直流)变换器,对电路进行滞环PID控制分析,并通过仿真试验证明了该方法的可行性和优越性。
1 充电器的电路拓扑结构及控制原理
本文所设计的蓄电池充电器采用移相全桥变换器,其主电路图如图1所示。蓄电池充电器的充电原理是充电器首先通过一个功率因数校正PFC电路将市电整流成主电路的输入直流电压,主电路通过一个全桥的逆变将直流电压逆变成交流电压,再经过一个高频隔离变压器降压,然后经过一个全桥整流电路将交流电流整流成需要的直流电流,其中,DS1~DS4为MOSFET S1~S4的内部寄生二极管,CS1~CS4则为其输出电容和外并电容之和。其中,主电路的参数为:输入直流电压为Uin=400 V,输出电流IO=5 A。高频隔离变压器的变比K=6,CO为输出电容,LO为输出电感,RO为输出电阻,UO为输出电压。
变换器控制电路的工作原理,将输出电流IO经采样电路采样后与参考电流Iref比较,将产生的电流误差信号△i送入电流环控制器,经过电流环控制器的处理,将控制处理信号作为移相全桥变换器4个开关管驱动信号,通过控制开关管的开通与关断来控制主电路的工作。
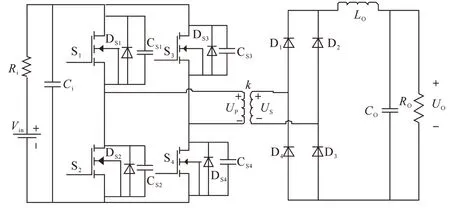
图1 移相全桥变换器电路图Fig.1 Circuit diagram of phase-shifted full-bridge converter
2 变换器的控制算法
2.1 传统PID控制
PID控制器是靠控制目标与实际行为之间的误差来消除误差的控制策略,通常控制系统要求响应速度快、超调量小、稳态误差小。单纯的PID控制在反馈控制动态、稳定特性要求较高的系统中,始终存在快速性和稳定性的矛盾。随着控制性能要求的提高,PID控制方法的研究得到进一步的发展。在快速脉冲式充电的过程中,金属氧化物半导体场效应管MOSFET 的驱动采用PWM 控制,但是为了更好地跟踪主电路输出电流的变化,输出的控制量IO,将通过PID 控制得到的波形与三角载波叠加得到脉冲信号来驱动MOSFET管开通关断。
通过分析整个系统幅相频率特性来设计PID的参数。主电路的开环传递函数为

将Lo=200 μH;Co=2 000 μF;Ro=10 Ω;变压器的变比K=6;三角载波幅值Uc=1 带入到式(1)中得式(2)。

首先利用控制对象传递函数类型选定补偿网络结构,然后依据频率特性曲线设定补偿网络的零、极点,再根据系统开环传递函数频率特性曲线,通过调整期望穿越频率,改变补偿网络增益,得到了反馈控制补偿网络的传递函数。根据以上的步骤得到了PID的参数分别为KP=130,KI=30,KD=0.059。
2.2 滞环PID控制
滞环控制方法[6-7](hysteresis current control,HCC)是目前在有源电力滤波器中应用较为广泛的一种控制方法,其工作原理是将指令电流信号与补偿电流的差值输入到具有滞环性质的比较器中,输出即为PWM信号,其经过相应的驱动电路,就可以控制主电路中开关器件,使有源电力滤波器实际输出的补偿电流减小或者增大,从而调节稳定输出电流。对于上下限不同的PWM 控制,以及在上下范围里通过PID 控制的3种控制模式,这种传统的滞环控制无法实现。
本文采用滞环PID控制以窗口函数的方式进行控制,将滞环控制与PID控制相结合,共同来控制输出电流的大小,由于PID控制方式稳定性好再加上滞环控制响应速度快,使得输出电流更稳定,电路的响应速度加快。其控制原理是将电流误差Δi做成窗口,根据参考输出电流的大小设置电流变化的上下值,当采样电流超出了标定电流的上下值时采样滞环控制,在标定电流上下值内则采用PID控制。控制模型的建立如下:
设定ΔA为电流幅值变化量,根据输出电流的大小以及误差的大小,通过不同的ΔA幅值设置对应的占空比大小。①当误差量Δi超过上限增量ΔA时,将占空比D调小,减小开关管的开通时间,从而降低输出电流的大小;②当误差量Δi低于下限增量ΔA时,将占空比D调大,增大开关管的导通时间,增大输出电流的大小;③当误差Δi在设定的增量上下限内则采用PID控制。

式中:D为PWM控制的占空比的大小;b1和b2表示超过窗口后所调占空比的大小。

式中:H为三角载波与调制波相切得到的幅值;A为三角载波的幅值;ΔD为占空比的变换值。通过设定不同的窗口变换量ΔA,计算出H的值,对滞环PID的占空比进行调节。
根据建立的滞环PID控制模型在Matlab/Simulink 中搭建电路的控制模型,滞环PID控制模型如图2所示。在本文中,输出电流的标准值设定为iref=5 A,经过控制模块得到的脉冲信号来驱动移相全桥电路中的4个开关管。图中的=iref=5,1代表PID控制器,2表示三角载波。
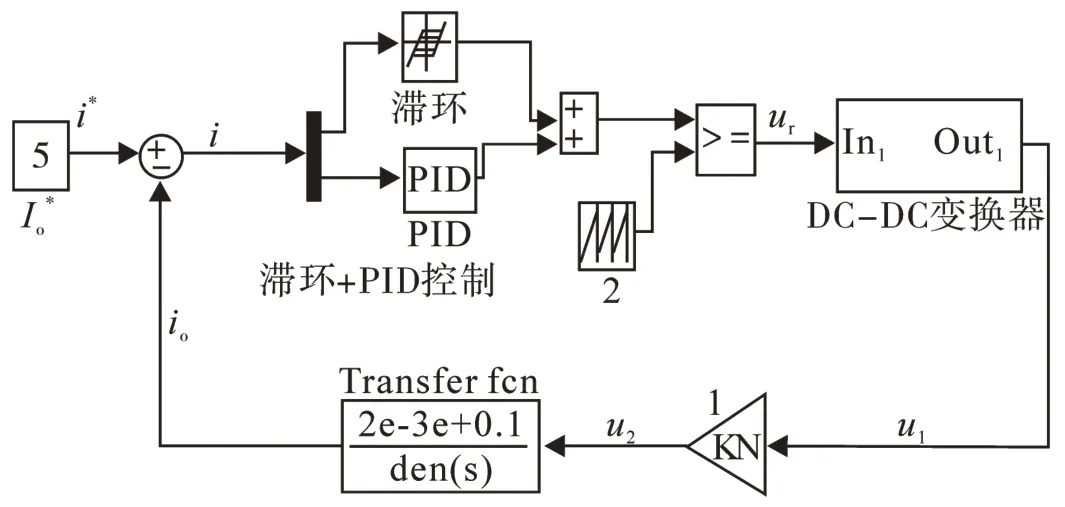
图2 滞环PID控制的simulink模型Fig.2 Simulink model of hysteresis PID control
3 仿真结果及分析
针对以上的分析,利用用于电力电子控制的软件Simulink进行了仿真实验,对两种电流控制方法的性能指标进行了直观的比较。根据传递函数,调节PID的3个参数:KP影响电流的幅值,使得反馈电流能够跟上给定电流,KI影响输出电流的稳定性,通过调节使得输出电流相对稳定,KD控制电路的动态稳定性,使得输出电流能够以较快的响应达到给定的电流。
3.1 PID控制器调节
通过观察PID控制电流波形,如图3所示,由于快速脉冲充电器开关频率f高,这就要求输出电流必须很快达到给定值,而通过观察输出电流波形达到稳定值的时间较长,电流的动态响应较慢,虽然所得到的波形相对较为理想,但是电流误差较大,平稳性较差,在充电过程中对电池有较大影响。在快速脉冲充电过程中,由于一个因期内相应时间较长,将严重缩短电池的使用寿命。
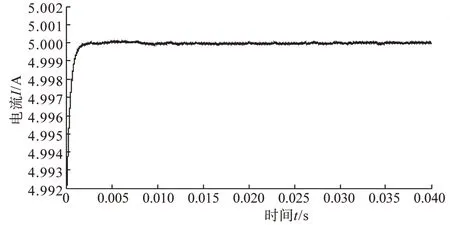
图3 PID控制电流仿真波形Fig.3 Simulation waveforms of PID control current
3.2 滞环PID控制器调节
将电流误差信号做成3个窗口,根据窗口大小进行占空比D的调节,以及PID的控制,改进型滞环控制响应速度快,当电流值超过窗口,通过调大或调小占空比D,迅速将电流拉回给定电流窗口之内,然后进行PID控制,如图4所示,给出不同窗口大小的仿真波形,窗口a=0.005 时和窗口a=0.000 5 时的仿真波形,与图3相比,电流的响应时间变短,稳定性更强。通过观察波形,窗口的大小并非越小越好,如果过小,PID响应速度慢,使得输出电流一直在滞环控制下波动,使得输出电流稳定性变差。由于滞环控制是一种瞬态响应过程,而PID控制是一种累积响应过程,使得滞环控制比PID动态响应速度快,能够很好地跟上给定电流值,结合滞环控制的优点,只需改变窗口的大小就可以较好地限制电流上下波动范围。
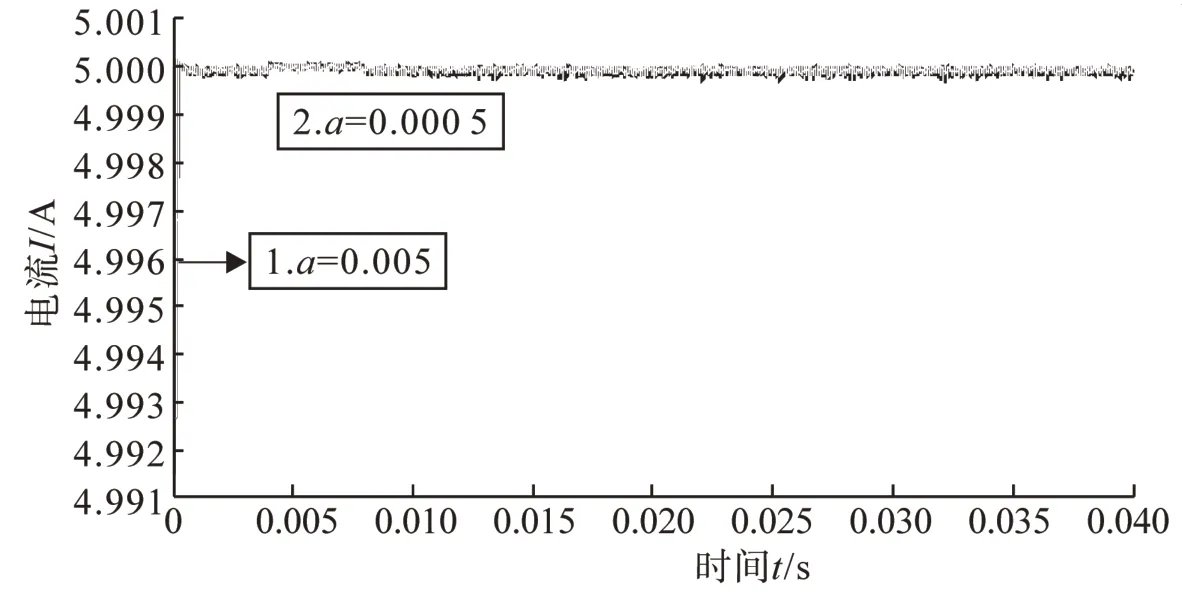
图4 滞环PID控制电流波形Fig.4 Current waveforms of hysteresis PID control
3.3 在输出端加上一定的负载
拓扑在输出端加上一个理想开关,在t=0.02 s 时系统达到稳定后加上一负载电阻为1 000 Ω的负载,观察输出电流的波形如图5所示,可知滞环PID控制加入扰动后,电流的变化相对较小,能够对外界的扰动短时间作以恢复,对电流的控制能力强,而传统的PID控制的电路,电流突变增大,响应时间变长不利于电池恒流充电,容易使电池充电不足,对充电电池有很大的破坏力,将缩短电池的使用寿命,从而可知,加入滞环控制的PID控制对外界的干扰能力强并且响应速度快。
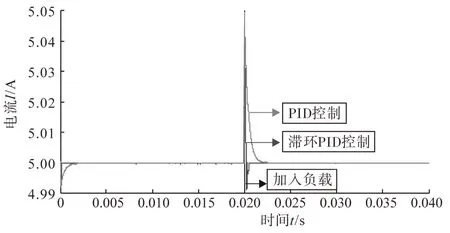
图5 加入扰动后电流波形Fig.5 Current waveforms after adding disturbance
3.4 不同PID参数的滞环PID控制
针对不同的PID 参数比较输出电流的稳定性,当PID 的参数增大(KP=180,KI=50,KD=0.06)和减小(KP=120,KI=20,KD=0.04)时,仿真结果如图6所示。一般来说PID的参数很难达到精确,我们一般通过补偿网络的方式得到的PID 的参数都不够精确,在传统PID 控制中对KP,KI,KD的参数都有严格的要求,但是对于滞环PID 控制来说,PID 的参数不一定足够精确就可以保证系统输出足够稳定、响应速度快。
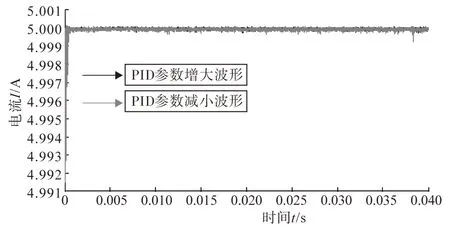
图6 不同PID参数的滞环PID控制波形Fig.6 Hysteresis PID control waveforms of different PID parameters
对比图3和图4仿真波形图可知,在输出电流控制上滞环PID控制方式较PID控制在稳定性和响应速度上都有明显的优越性,根据图6可知,滞环PID控制对PID控制参数的要求不需要很严格,只需要选择恰当的iref的幅值范围就可以得到稳定输出电流,但在幅值范围的选择过程中,并不是范围越小越好,通过对比图4中的波形图可知,窗口过小反而降低了输出电流的稳定性。通过对比图5的波形图可知,滞环PID控制对外加负载的响应速度明显优越于PID控制,同时,输出电流也更加稳定。
4 结论
实验验证了滞环PID控制方式在对输出电流的稳定性和响应速度上更具优越性,验证了所提出改进方法在理论上的正确性和可行性,特别是对于以恒流充电方式的蓄电池充电器具有很好的应用价值。采用滞环PID 控制能够快速地将输出电流稳定在一个相对的恒定值,在电池充电的过程中可能受到负载的影响,而滞环PID控制能够保证充电器对负载干扰具有较快的响应,对电池的充电影响将更利于电池充电,同时,响应速度的加快使得充电器能以较快速度达到电池需要电流大小,缩短电池的充电时间,提高充电器的充电效率。同时,对于输出需要恒流的变换器具有较高的应用价值。
[1]刘珺,傅远,王立业.新型可编程蓄电池充电器研究[J].电源技术,2013,37(11):2007-2008,2015.
[2]赵波.电动汽车快速充电器的研究[D].成都:西南石油大学,2012:3-5.
[3]王斌龙,宋杰.电动汽车电池充电器的设计与研究[J].电源技术应用,2013(8):292-293.
[4]李乔,吴捷.自抗扰控制及其在DC-DC变换器中的应用[J].电工技术学报,2005,20(1):83-88.
[5]韩晓新,宋克岭,李怡麒,等.基于改进滞环电流控制策略的有源电力滤波器[J].控制工程,2011,18(2):191-193,227.
[6]王建华,张方华,龚春英,等.滞环电流控制逆变器建模及分析[J].电工技术学报,2010,25(6):63-69.
[7]洪峰,刘军.滞环电流控制型双BUCK逆变器[J].电工技术学报,2004,19(8):73-77.
[8]徐晓玲,刘珺.燃料电池与超级电容复合双电源系统功率控制研究[J].华东交通大学学报,2012,29(6):30-34.
[9]云庆,杨旭,王兆安.开关稳压电源的设计和应用[M].北京:机械工业出版社,2010:59-85.
猜你喜欢
电子设计工程(2022年15期)2022-08-17
光通信研究(2020年2期)2020-06-15
科技创新与应用(2019年17期)2019-06-09
小学生优秀作文(趣味阅读)(2018年6期)2018-11-29
汽车维修与保养(2017年1期)2017-05-15
电子制作(2016年15期)2017-01-15
汽车维修与保养(2016年1期)2016-09-07
汽车维修与保养(2016年12期)2016-03-14
汽车维修与保养(2016年11期)2016-02-21
中国质量与标准导报(2014年1期)2014-02-28