遥感卫星高精度高稳定度控制技术
2014-12-31 11:46边志强蔡陈生沈毅力
上海航天 2014年3期
边志强,蔡陈生,吕 旺,沈毅力
(1.上海卫星工程研究所,上海 200240;2.上海航天控制技术研究所,上海 200233)
0 引言
遥感卫星的主要任务是为用户连续提供高质量的地球遥感信息,其应用范围涉及地球资源普查与详查、地理测绘、军事侦察等领域,在国民经济和国防建设中发挥了不可替代的作用。未来遥感卫星逐渐向高空间分辨率、高定位精度、高时间分辨率、高辐射精度、全天时、全天候访问、多频段测量的方向发展,这对卫星平台控制精度和稳定度提出了很高的要求。遥感卫星在轨运行期间,卫星姿态控制系统的主要任务是实现卫星三轴稳定定向控制或进行角度机动控制,其控制精度直接关系卫星成像的质量,尤其是对卫星的姿态稳定度要求严格。本文从遥感卫星高精度与高稳定度控制出发,分析了高精度高稳定度控制技术的应用和发展,对挠性多体卫星动力学分析与控制、高精度姿态确定,以及在轨辨识等关键控制技术进行了综述。
1 典型高精度控制技术应用
1.1 高稳定度多挠性卫星控制
遥感卫星多携带大面阵挠性太阳帆板、大量的晃动液体燃料和大孔径挠性通信天线,其特点是整星挠性大、低频模态密集、模态耦合程度高、结构阻尼小等。挠性体一旦受到某种激振力的作用,其大幅度的振动可延续很长时间,而且会与星上转动部件产生耦合振动。这将影响卫星的正常工作,如姿态稳定度和指向精度等,最终对遥感卫星的成像质量和定位精度产生负面影响。目前,国内外对高稳定度多挠性卫星控制技术的应用已十分广泛。
遥感卫星姿态控制的技术指标主要有指向精度、稳定度/长期稳定度、抖动/短期稳定度、姿态确定精度和姿态机动能力等。哈勃太空望远镜(HST)的质量11.6t,长13.3m,直径4.3m,携带大面阵太阳帆板,指向精度为0.01″,姿态稳定度要求在数小时内镜像在焦面的稳定度误差不超过0.007″,在 18min内完 成 90°姿态 机动[1-2]。美国Landsat-7卫星姿态控制系统的正常模式考虑了挠性、干扰和噪声的影响,采用了基于飞轮执行机构的PID控制,指向精度为0.01°~0.05°,姿态稳定度10-6~10-4(°)/s,姿态测量方案使用捷联式星跟踪器2个和捷联式速率积分陀螺1套,用直接匹配法识别恒星,由六维卡尔曼滤波器进行姿态估计和陀螺的常值漂移标定[3]。
法国的SPOT卫星可从高度832km拍摄分辨率优于10m的照片,其控制要求为姿态测量中地球敏感器0.1°,太阳敏感器0.05°;速率测量中积分陀螺1×10-4(°)/s;指 向 精 度 0.15°(频 率 低 于0.001Hz)、姿态稳定度8×10-4~5×10-4(°)/s(频率高于0.001Hz)。SPOT-4卫星控制系统存在大量挠性模态,设计中充分考虑了模态参数、耦合系数和干扰的影响,除采用经典控制技术外,还曾考虑用LQG/LTR控制、H∞控制方法等获取控制系统的鲁棒性[4]。
日本的高级陆地观测卫星(ALOS)质量4t,有22m单翼太阳电池阵、9m相控阵雷达和2m数据中继天线挠性附件3个,其姿态稳定度指标为滚动、偏航短期2×10-5(°)/0.37ms,俯仰1×10-5(°)/0.37ms;长期稳定度三轴2×10-4(°)/5s(中继天线无转动)或4×10-4(°)/5s(中继天线转动)。在轨三轴指向精度为4×10-4(°)[5-6]。在姿轨控系统的设计中,采用了多种平台及地面系统技术,其中包括低阶挠性模态的相位稳定、高增益轮伺服回路、天线指向控制的主动式衰减、精确的协同控制和参数识别、反作用力轮角速度偏移、太阳帆板驱动装置和基于星体跟踪仪的姿态控制等技术。
我国东三卫星平台的指向精度约0.15°,姿态稳定度约1×10-3(°)/s;风云三号极轨气象卫星携带单翼大面阵太阳帆板,星上有大型挠性旋转载荷进行扫描,设计采用基于挠性卫星在轨模态识别和地面模态试验结果的联合修正方法,在轨指向精度0.15°、姿态稳定度优于3×10-3(°)/s。我国正在研制的新一代静止轨道气象卫星,将携带大面阵太阳帆板和大量液体燃料,扫描辐射计和大气垂直探测仪两台载荷同时扫描工作,其设计指标为指向精度0.01°,三轴姿态稳定度优于5×10-4(°)/s。
1.2 快速机动控制
为增大遥感卫星的成像幅宽,对突发事件地区实施即时观测,或通过卫星沿轨迹方向的前视和后视实现同轨立体成像,对卫星快速机动能力提出了严格的要求[7]。如美国增强型成像系统(EIS)在高级光学成像侦察卫星的基础上稍作变动,增加了成像雷达,卫星质量20t,配备大控制力矩陀螺(CMG),具有侧摆机动能力。俄罗斯ARKON卫星的质量约6t,具有20°左右侧摆能力,在其运行高度可使星上相机对在距离星下点1 000km范围内的多个目标区进行成像,也能对同一目标进行多视角观测。法国太阳神卫星的质量2.5t,可在25s内完成60°姿态机动。QuickBird-2卫星是迄今为止分辨率最高的商业遥感卫星,可绕滚动和俯仰轴机动±30°而避免太阳光直射星敏感器,且能由4个高精密、低干扰飞轮在45s内实现机动48°[8]。
中国资源三号卫星装载了三线阵测绘相机和多光谱相机,可提供幅宽大于51km、分辨率2.1m全色/5.8m的多光谱平面影像和3.5m的立体影像,具有±32°侧摆观测能力,指向精度0.05°~0.10°,姿态稳定度2×10-4~1×10-3(°)/s。海洋二号卫星指向精度优于0.1°,姿态稳定度优于1×10-3(°)/s,具有小角度机动能力[9]。
1.3 高精度姿态确定
卫星平台的姿态确定信息作为遥感数据几何纠正的输入量,其精度直接决定了遥感图像地面定位的精度,且常作为影响最大的一项因素,因此高精度姿态确定技术在遥感卫星领域得到了广泛应用。快鸟-2(QuickBird-2)卫星携带全球成像系统-2000(BGIS-2000),可 提 供 分 辨 率 0.82m、地 面 幅 宽22km的全色图像和分辨率3.28m的多光谱图像,卫星指向精度每轴小于0.5mrad(3σ),姿态稳定度小于10μrad/s(3σ),星上配置了 CT-601星跟踪器2台和LCGA-20环形激光陀螺提供滤波后的姿态信息,姿态确定精度为15μrad(3σ)[8、10]。ALOS卫星能实现地面三维分辨率2.5m与全球数据采集,其姿态确定精度为星上1″、地面0.5″,由星敏感器、在轨辨识、用于姿态四元数估计的扩展卡尔曼滤波算法等技术实现[6]。
资源三号卫星要求在无地面控制点的定位精度100m,有控制点的平面定位精度25m,高程精度5m。星上配有高精度陀螺(漂移误差0.02(°)/h)和3台高精度星敏感器(精度优于5″),依靠星上高精度陀螺和星敏感器数据实时确定高精度姿态,有星敏感器、陀螺下传的测量数据事后高精度相对定姿两种实现方案,其事后姿态处理精度优于1″(1σ)的指标要求[9]。
1.4 自主智能控制
为抢占未来太空的制高点,先进空间国家在其宇航计划中增大了对智能自主控制技术的投入。欧空局从20世纪70年代开始就一直瞄准借助于在轨高级无人自主控制技术赶超美国和前苏联。NASA早在1988年制定的空间政策和计划中就确定了包括人工智能、智能控制和鲁棒多变量自适应控制等8项关键技术。美国空军2025年计划、美国航天司令部2020年长期规划,以及NASA新盛世计划均将智能自主技术放在首位。新盛世计划的目标之一是研制自主航天器,旨在使航天器能自主完成制导、导航和控制(GNC)、数据处理、故障判断和部分重构与维修,从而显著减少对地面测控、通信等支持系统的依赖[11]。
美国对智能自主控制技术领域的研究在国际上处于领先地位,主要研究机构有戈达德空间飞行中心、海军研究院、JPL实验室、马歇尔空间飞行中心、兰利研究中心等。NASA早在20世纪90年代初就应用神经网络开展空间站分级式智能控制研究,并进行了成功的物理模拟实验[12]。洛·马公司制造的通信卫星,不仅能实现小故障时保证自主正常运行,大故障时能转入安全模式确保生存,而且能在中断正常工作2h内恢复到正常工作模式[7]。作为NASA新盛世计划的先导,1998年10月24日发射的深空1号探测器,将智能自主控制技术全面推到了新水平。亚毫米波天文卫星通过地面装载在处理器中的预编指令实现航天器自主运行,最坏情况下航天器的设计可保证在与地面失去联系时间28h的条件下实现自主运行而不危及正常运行[7]。
20世纪90年代初,俄罗斯就成功应用自适应技术以控制侦察卫星的燃料晃动与帆板振动,且早已实现联盟号飞船与和平号空间站自主交会对接;俄罗斯第四代侦察卫星等航天器采用了变参数非线性自适应控制抑制挠性振动和液体晃动;前苏联在1987年就采用智能控制技术对太阳帆板的挠性振动进行了有效抑制,节省燃料90%[13-14]。
日本最早提出了智能计算机研究计划,长期致力于机器智能在空间的应用。日本研究了将模糊逻辑控制技术用于推力器控制逻辑选择,并提出了减法和加法两种方案。日本在1997年11月28日发射的ETS-VII技术试验卫星,于1998年7月7日圆满地进行了国际上第一次全自主交会对接。日本的ETS-VIII技术试验卫星采用了加速度计测量大型展开天线(基频0.1Hz)和太阳帆板(基频0.08 Hz)的结构参数,并进行在轨辨识和自适应控制。
我国虽然也实现了自主姿态控制,但控制指标与国外同类卫星相比还有差距。目前国内在航天器型号工程中已经实现在轨自主姿态确定与控制,部分采用了故障隔离、诊断和系统重构等智能化技术,收到了良好效果,另还将全系数自适应控制方法创造性地用于飞船返回再入落点预报,实际飞行结果表明其预报精度达到世界先进水平。
1.5 发展趋势
未来遥感卫星多携带大面阵挠性太阳帆板、多种运动载荷,挠性振动、运动部件与整星动力学耦合,力学特性复杂;需要快速频繁机动以便于在轨观测;需要通过高精度姿态以实现图像高精度定位;光学有效载荷对高频振动敏感,需要抑制高频振动等。这些特点决定了未来遥感卫星控制技术的发展趋势。
1.5.1 挠性卫星高稳定度控制
目前,美、法、日等航天发达国家并未彻底解决甚高精度姿态控制问题,该技术还处在积极探索和发展中,其中有代表性的是美国NASA于20世纪90年代开始的控制与结构系统相互作用技术计划[8]。该计划的长期努力目标是:对任意输入和机动,使航天器动态响应幅值减少50%,且系统质量增加最少;采用宽带宽控制系统使控制和指向能力改进数个量级;航天器姿态控制系统在轨性能的幅值、频率、时间和稳定性等指标预测精确至90%;发展控制系统的优化建模、分析和设计方法;通过分析和试验提高对飞行系统性能的验证能力[15]。
1.5.2 大型挠性卫星快速机动与快速稳定控制
为满足对地观测卫星的观测范围和实时性要求,部分任务要求星体在短时间内快速侧倾并大角度俯仰机动,在达到目标角执行任务时对姿态和姿态角速度有很高的精度要求。如低轨遥感卫星在80s内实现70°大角度机动,机动最大角速度不小于4(°)/s,姿态稳定度优于10-4(°)/s;高轨遥感卫星进行快速小角度机动实现短时间内大范围的高分辨率观测。
1.5.3 高精度姿态确定
姿态确定精度直接决定了图像定位精度的高低。甚高分辨率对地观测卫星和测绘卫星有重要的军用价值,是武器系统精确打击目标的有力支持。在精确打击中,目标侦察与精确定位是提高命中精度的基础。甚高分辨率侦查卫星立体测绘卫星对姿态姿态确定精度一般优于0.5″(1σ)。
1.5.4 卫星在轨自主智能控制技术
实现卫星自主运行,对减轻地面测控负担、降低卫星运行成本和提高卫星生存能力等有重要意义,这是航天科学技术发展的趋势。未来卫星的复杂程度越来越高,对可靠性的要求也越来越高,这对航天器自主诊断、系统重构与容错控制技术提出了更高的要求。我国需针对未来大型卫星控制技术的发展趋势,对完善自主姿态确定、自主导航、自主控制、自主故障检测、识别、定位和系统重构等进行研究。
2 关键技术
随着遥感卫星技术不断发展,卫星结构更复杂,挠性附件运动、结构振动和液体晃动相互影响,各种运动的耦合程度较高。卫星设计寿命不断延长,对可靠性也提出了更高要求。面对更复杂的卫星动力学特性和控制系统,更高的控制精度、可靠性和鲁棒性要求,挠性多体卫星结构-控制一体化、高精度姿态确定及卫星在轨辨识等关键技术成为了研究焦点。
2.1 挠性多体卫星结构-控制一体化设计
为使卫星的控制实际可行、机动性与可靠性高,要求卫星的结构与力学特性要合理,构形的选择、结构的设计利于控制系统。目前,研究者高度重视挠性多体动力学控制问题,并运用新的控制理论和控制技术进行结构-控制一体化设计,进行高精度的数学建模、地面试验验证以及在轨辨识等,取得了很好的成果。
a)卫星建模
在挠性多体卫星动力学建模中,引入了挠性结构振动模态,包括刚体模态和弹性模态,使挠性动力学模型成为高阶多自由度系统,受控制系统可控可观性限制,能控的自由度有限,因此挠性动力学分析和控制设计必须对模型进行降阶,包括部件级模态阶段和系统级模型降阶[15]。迄今,大部分复杂卫星属于低频模态不太密集的挠性结构系统。对可能出现的刚度低、挠性大、阻尼小、基频低和模态密集的空间大型挠性结构,必须将部件级降阶与系统降阶和结构级降阶结合。对挠性多体卫星的工程建模必须与控制紧密结合,由控制要求简化模型,用控制效果验证模型的有效与可行。
b)卫星结构控制
从控制对象特点来说,较简单的情况是挠性附件与中心刚体的控制,控制目的是使中心刚体姿态角与姿态角速度达到指标要求。至于挠性模态振动,只要不严重影响中心体运动或在指标范围内能衰减即可。因此,控制策略的要点是使挠性模态运动对中心刚体控制系统的耦合尽量小,即设法避开挠性振动的影响,使控制系统的频带带宽与模态频率隔离(一般要求控制系统带宽较挠性模态的基频低1个量级)。常用的控制算法是带结构滤波器的PID控制,其优点是易实现,典型代表是HST的控制系统[2]。NASA在地面对结构挠性及各种干扰、噪声进行了大量的分析,但HST入轨后出现了意料外的干扰:进出阴影区时太阳帆板不均匀热变形引起的太阳帆板振动使姿态控制系统不能满足给定的性能要求。这暴露了结构滤波器的PID控制系统跟踪突变干扰的能力较差和鲁棒性较差的缺点。
随着卫星结构越来越复杂,控制要求越来越高,且空间环境恶劣,各种因素相互耦合,控制对象的挠性特性不断发生变化,现有的控制方案已很难满足任务的需要,挠性结构控制逐渐成为高稳定度控制技术的重心,迅猛发展的控制新理论、新技术获得了研究者的关注。目前应用较多的有状态空间、多变量频域设计方法,如独立模态空间设计法、最小增益极点配置、前馈控制+反馈控制、自适应滤波的前馈控制、H∞控制等。
c)星载旋转部件与整星动力学耦合控制
星载旋转部件主要有太阳帆板驱动机构、飞轮和各种旋转载荷等。由于材料、加工、装配等原因,转动部件存在由不均匀的质量分布、不期望的装配间隙等引起转速波动和动不平衡,由此产生的干扰力矩若与挠性附件振动相互耦合,则会引起卫星平台的稳定性变差,进而影响载荷观测和其他系统工作正常。
美陆地观测卫星-4的观测仪器旋转部件因受卫星振动的干扰产生微小振动,图像质量明显下降;国际通信卫星V号(Intelsat V)-F2南太阳帆板在轨工作中曾出现旋转中断数分钟或停止转动,主要原因是太阳帆板的挠性振动与步进电机的振荡相互耦合[16]。我国的卫星发生过此类问题,HY-1卫星发射入轨后,由卫星姿态角遥测数据发现:水色仪转动机构未开机时卫星姿态角呈基本平稳状态,仅略有微小波动;水色仪转动机构开机时,伴随电机的转动卫星姿态角和姿态角速度均有较大的反应,滚动和偏航姿态角速度呈快速周期变化,可视为星体出现一定频率的抖动,幅值(遥测显示值)为0.02~0.06(°)/s,并随星下点的纬度而变;水色仪关机后,该振动消失。经分析,水色仪与挠性太阳帆板存在动力学耦合,帆板的挠性振动对水色仪转动机构的运动产生了影响,表现为驱动电流变化增大、运行状态不稳,严重时产生失步[17]。某卫星大型旋转载荷动不平衡残余产生较大的干扰力矩,同时挠性太阳帆板-星体组合结构频率与载荷旋转频率接近,则干扰会被放大,对卫星姿态产生较大扰动,影响载荷的正常工作[18]。
因此,一方面需提高旋转部件的动力学建模、动平衡检测与控制的精度,减小旋转部件运动产生的干扰力矩,并使转动频率避开挠性附件模态频率;另一方面采用前馈补偿控制、输入成形振动等先进控制方法抑制挠性太阳帆板的振动[16、19]。
2.2 卫星在轨试验
一般情况下,通过地面试验和有限元法数字仿真辨识卫星动力学特性,将整星分解为多个构件,利用子结构振动试验和模态综合法获取模型和参数,在此辨识基础上,设计姿态控制系统。随着卫星的大型化、挠性化和多体化,就不能忽略卫星在宇宙空间与在地面所处的重力、大气影响、支撑等环境的差异。有必要利用在轨飞行数据和系统辨识方法,对挠性多体卫星结构模态、干扰力矩等参数进行辨识,因此研究高精度在轨辨识技术不可或缺。

图1 卫星动力学模型与模态试验流程Fig.1 Satellite dynamics model and modal experiment process
挠性卫星姿态控制以及快速准确的姿态机动控制中的关键步骤是在轨辨识。在轨辨识在国外尚属于较新的技术,第一次利用在轨辨识技术的航天器是美国的木星探测器(Galileo),在控制器设计中采用了陷波滤波器。为精确获知卫星的关键模态参数,1993年1月20日进行的在轨离线辨识过程中,输入采用执行机构的脉冲信号,输出为速率陀螺测量的角速率,用FFT算法对频率低于15Hz挠性模态进行了开环辨识。1994年1月对HST进行了27h的周期干扰模型在轨辨识试验,用FFT方法辨识外部周期干扰,对卫星遭受周期干扰时姿态控制系统的输出信号(速率陀螺测量的角速度)进行采样(采样频率40Hz),对采样后信号作FFT变换,其最大幅值对应频率等于系统的主要频率,即卫星姿态的主要振荡频率。因该频率是由外界干扰激发的,故就是干扰对应的频率。通过在轨辨识试验,不仅辨识出HST视轴负向正对太阳和视轴负向垂直太阳两种姿态下的主要干扰频率,还意外发现了在地面试验中未激励出的多个挠性模态,引起挠性振动的主要是高频模态,而不是地面试验中认为的0.1Hz挠性模态。根据在轨试验,可确定主要模态的形状,如频率0.1Hz的模态主要是平面外弯曲模态[1-2]。
日本ETS-VI卫星辨识试验采用卫星反作用喷气产生输入力矩,形成能充分激励卫星挠性模态的信号,由加速度计、姿态和姿态角速度测量仪器给出输出信号。ETS-VIII卫星辨识试验利用卫星卸载时的输入输出数据,采用子空间方法进行在轨离线辨识,修正控制器参数,提高控制精度。研究表明采用此法可精确提取挠性振型和刚性振型的模态参数[20]。ALOS卫星利用多种精确测量敏感器(64Hz的加速度计9个,675Hz的抖动传感器1个,1Hz三头星体跟踪仪1个,10Hz惯性基准装置1个)的在轨测量值评估卫星姿态特性及性能,对太阳帆板驱动、数传中继通信天线驱动和反作用飞轮工作引起的动力学运动及扰动进行了在轨辨识试验,辨识结果显示了预期的和未预期的特性。设计者利用精确测量敏感器和在轨分析结果,重新修正了整星动力学模型,并2次更新控制律,卫星姿态稳定度提高了20%,有效改进了卫星的姿态稳定性[5]。
在轨辨识技术能对复杂卫星动力学的数学模型进行高精度修正,为提高卫星控制精度提供了重要手段,有望成为高精度卫星控制系统的组成部分。
2.3 高精度姿态确定
遥感卫星对控制精度、图像定位精度的要求越来越高,而卫星姿态确定精度是控制精度和图像定位精度的重要误差源之一,卫星姿态确定是高精度高稳定度控制的一项关键技术。影响高精度姿态确定精度的有姿态敏感器测量精度、滤波算法、敏感器布局设计、姿态敏感器在轨热变形等。
a)高精度姿态敏感器和滤波算法
目前国内外多用星敏感器和陀螺组合实现高精度姿态确定(见表1),而姿态敏感器的硬件很大程度决定了姿态确定精度的高低。目前,国外星敏感器的精度已达3″,如法国SODERN公司的SED36(用于Pleiades卫星)噪声等效角(NEA)为3.6″;一体化HYDRA星敏感器NEA为2.6″,一些小视场星敏精度优于1″;美国Ball公司HAST星敏感器精度0.6″。光纤陀螺因寿命长、高精度、数字化等特点而获得了广泛应用,法国IXSEA公司光纤陀螺已用于高轨通信卫星、科学卫星和低轨地球观测卫星,随机漂移指标0.001(°)/h,Pleiades卫星的高性能光纤陀螺的随机游走0.000 15(°)/h1/2。
按ESA标准,根据误差变化周期的不同,星敏感器误差分为常值偏差、低频误差(LFE)、NEA。常值偏差可通过在轨恒星敏感标定,NEA可通过陀螺数据进行滤波抑制,指标可适当放宽。低频误差分成两类:一是表现为热变形误差的轨道误差,由轨道周期性变化引起;另一是视场观测误差(天区误差),由被敏感的恒星位置变化引起的包括星表误差、恒星残余标定系数等。低频误差难以修正,很大程度决定了卫星姿态基准,选型时应将LFE作为重点指标。陀螺误差主要包括常值漂移、随机漂移和随机游走系数三部分,随机漂移是低频慢变误差,随机游走是陀螺高频误差。在卫星姿轨控系统中,大角度姿态机动或卫星入轨段的姿态调整范围较大时,主要考虑随机漂移指标;卫星在轨稳态运行时,高精度姿态确定主要考虑随机游走指标,因短时间内星敏感器测量值能修正陀螺漂移。
陀螺与星敏感器组成的高精度姿态确定系统中,利用陀螺的输出构成姿态预估器,星敏的输出用于姿态滤波修正,同时对陀螺漂移进行估计和补偿。扩展卡尔曼滤波(EKF)是非线性系统常用的一种递推滤波算法,将非线性系统线性化后用近似方法解决非线性问题,是基于准确的动力学模型最优误差估计算法。影响EKF姿态确定精度的因素主要有系统模型的线性化误差、敏感器模型及噪声统计特性、敏感器的采样频率、初始误差、滤波参数等[21-22]。

表1 部分高精度卫星姿态确定方案设计Tab.1 Several design of attitude determination of high accuracy satellite
b)姿态敏感器布局设计
当卫星轨道为低轨、低倾角轨道,轨道面进动速率快,卫星的光照条件、阴影时间变化大,导致星上光学敏感器的布局约束条件多、滤波算法复杂。美国TRMM卫星因地平仪在轨道特定位置受到太阳和月亮的干扰,滚动姿态会出现跳变,影响了姿态测量精度,其星上采用的卡尔曼滤波由于轨道的进动导致确定的姿态与实际姿态出现了最大0.2°的偏差,后经地面校正才解决了卡尔曼滤波精度问题[23]。为避免出现同样的状况,须对部分特殊卫星轨道特性导致的姿控敏感器(特别是地平仪和星敏等光学敏感器)布局约束条件和相应的姿态确定算法进行研究。
c)有效载荷与姿态敏感器热变形一体化补偿控制
根据美国静止轨道GOES卫星在轨经验,星上光学载荷热形变量达到1 000μrad时,热形变导致扫描镜光轴的长周期变化严重影响图像定位精度(定位误差增大30km),需对热形变产生的光轴指向误差进行控制与补偿[24]。部分高精度卫星采用有效载荷和星敏感器热变形一体化安装的方法,两者共用一个安装面或将姿态敏感器安装在有效载荷上,在轨热变形大小、方向基本保持一致。因此,实现有效载荷基准的姿态测量是姿态确定的最终目标,需探索姿态敏感器基准与有效载荷基准间相对变化的规律,针对影响两基准关系的形变、振动、抖动等因素,开展测量机理和方法、敏感器配置优化、数据处理方法等研究[25]。
3 实现途径
3.1 挠性多体卫星动力学建模仿真及地面试验验证
遥感卫星的挠性多体动力学特性和试验验证技术可分为以下三个技术层次。
a)挠性多体卫星动力学建模与仿真
步骤一般为:首先用有限元软件分析各类挠性部件模态,分别给出各类挠性附件的模态参数、模态振型和惯量矩阵等;然后用挠性动力学分析软件计算耦合动力学参数;最后对耦合参数的准确性进行惯性完备性检验,还包括用模态有效质量进行对比验证,并从工程和物理概念分析振动振型对卫星平动和转动的影响,尤其要注意由于构形相对卫星质心的不对称产生的附加耦合影响等。如图2所示。
在卫星挠性多体动力学设计过程中,仿真环节必不可少。挠性多体卫星动力学仿真任务涉及的专业学科主要有多体动力学、运动学、材料学、结构动力学等。针对不同学科,采取Adams,Matlab,Nastran/Patran等仿真软件建模,利用多学科联合仿真,可有效解决动力学分析中挠性多体复杂系统仿真问题。在分析卫星及挠性附件结构模态时,以往只针对一阶模态进行分析和设计控制系统,但对卫星高精度高稳定度控制需分析至少5阶的结构模态。
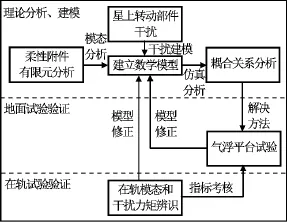
图2 挠性多体卫星动力学研究流程Fig.2 Process of flexible multi-body satellite dynamic studying
b)基于大型气浮平台的卫星结构辨识
在地面进行整星结构模态辨识试验时,很难模拟空间零重力的力学环境,设计抵消掉地球重力的设备是进行试验验证的前提条件。挠性卫星的结构辨识物理试验系统,主要以气浮平台(如图3所示)为结构基础,气浮装置通过产生压缩气流支撑卫星系统以抵消重力,模拟零重力环境中卫星系统的自由漂移;卫星结构模型及其太阳帆板等附件,在气浮台运动或附加外界干扰力矩后,会产生模拟太空真实情况的振动状态,进而测定出零重力环境中的卫星结构模态。
卫星结构模态辨识可分为频域辨识和时域辨识两大类。频域辨识的模型用传递函数描述,典型的有正弦扫描法和谱分析法。时域模型辨识的模型一般用状态空间模型或输入输出模型描述,典型方法有最小二乘法和系统实现法等。如正弦扫描法和谱分析方法在美国的伽利略航天器上获得了应用,系统实现方法在日本的ETS-VI和美国的MIT实验室模型上得到了检验[26]。
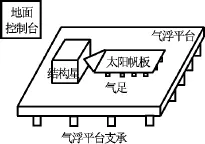
图3 基于气浮平台的卫星结构辨识试验系统Fig.3 Tlexible multi-body satellite dynamic testing system based on gas-lubricated stage
c)大型旋转运动载荷动平衡检测与控制
为满足遥感任务需要,需配置大型旋转运动载荷,对其动平衡特性如不能进行有效的高精度动平衡控制,如转动体总成质心偏离旋转轴线则由质心偏心产生干扰力矩,而转动体总成相对转轴的惯性积不为零则由惯性积引起干扰力矩。过大的残余干扰力矩会扰动卫星姿态,影响姿态稳定度。
基于建立的卫星多体挠性姿态动力学模型,利用动平衡检测和控制技术控制转动体残余干扰力矩,按误差识别、静平衡试验、转动部分动平衡试验、整机动平衡试验和校验等步骤实现转动体的动平衡检测与控制,减小由转动体动不平衡产生的干扰力矩。实际工程应用表明该动平衡检测与控制方法的效果较好[18]。
3.2 挠性多体卫星姿态控制
卫星控制系统中常用的经典控制方法主要是带滤波器的PID控制,但缺点是跟踪突变干扰的能力和鲁棒性等较差。为实现卫星的高精度高稳定度控制,有必要研究其他挠性结构控制方法。
a)H∞控制
基本要点是选择一控制器,使从不确定因素(包括干扰、不确定参数)至系统输出的传递函数的功率极小化,实现容许某些误差的目的。其优点是控制系统鲁棒性好,缺点是鲁棒控制不可能完全消除误差影响,不能使真实控制系统的指标达到最优;此外H∞控制器阶数一般很高。
针对HST进出阴影区时太阳帆板振动问题,NASA对控制系统重新设计,用解析H∞多输入多输出回路成型方法,进一步提高了控制指标。该方法在出现太阳帆板扰动的低频范围内获得灵敏度函数的衰减,降低扰动对太空望远镜的影响;在干扰衰减的同时尽可能提高系统对模型不确定性的鲁棒性。仿真结果表明:H∞的扰动抑制作用效果较好,较SAGA-II方法多提供了20dB的扰动衰减。改进期间还采用了模型参考降阶技术、LQG控制方法、H∞方法、协方差控制法,以及双模扰动补偿先进等现代控制理论[1]。
法国对SPOT卫星进行了线性二次高斯/回路传递复现(LQG/LTR)控制方法研究。与经典控制技术相比,LQG/LTR能有效抑制干扰,但该方法是针对太阳帆板的某个特定位置设计的,当帆板位置变化时需改变控制参数。为解决卫星多种不确定性,考虑采用H∞方法。应用一个简单模型:将卫星视作一刚体,太阳帆板作为挠性附件,卫星模型中含阻尼非常弱的零极点、参数不确定性和动力学变化。在此基础上开展了H∞控制方法研究,通过求解互质因子、鲁棒镇定等问题得到控制器,用μ分析验证系统在挠性模态频率不确定时的鲁棒性。对完整模型的时域仿真结果表明:用一固定H∞控制器能在全轨道上稳定卫星姿态并保证系统性能指标达到设计要求[4]。
b)自适应滤波前馈控制
该方法最先用于噪声控制,自20世纪80年代拓展至结构振动控制,近年来又被用于智能结构的振动控制,以抵消外扰引起的受控对象的响应为出发点,基本点是设计自适应滤波器,其输出通过执行机构产生控制力(力矩)作用于受控对象,使受控对象中对振动水平有一定要求的位置上的响应与外扰在这些位置上的响应抵消,实现消除或减少受控对象振动。
现代卫星一般带大型旋转运动部件、挠性天线(如静止轨道微波气象卫星天线口径3m,电子侦察卫星天线为几十米等)和太阳帆板。当驱动这些运动部件时,会产生外干扰力矩,作用于卫星本体将影响卫星的姿态精度。为保持姿态精度,必须消除这种干扰。一般采用飞轮进行前馈补偿,即根据运动体运动方程计算驱动产生的外干扰,在运动部件驱动过程中实时驱动飞轮消除外干扰,既不提高姿态控制系统的反馈增益又抑制姿态变化[27]。
对挠性体卫星,姿态机动过程中可激起帆板挠性振动,此振动会影响卫星姿态,严重时将导致系统不稳定,故机动过程中的振动抑制尤为重要。国外对挠性结构卫星的大角度姿态机动提出了控制方法,其中应用广泛的是输入成型方法。输入成型是指由脉冲系列与一定的期望输入相卷积,所形成的指令作为系统的输入控制系统运动。其中:期望的输入根据系统的刚体运动要求得到,可保证实现刚体运动;脉冲系列根据振动系统的频率和阻尼得到,用于抑制振动。脉冲系列中各脉冲的幅值和作用时间通过求解一定的约束方程组(如对余留振动幅值的约束、对鲁棒性的约束、对成型器时间长度的约束等)得到。实际上,输入成型是一种特殊的指令成型技术,用脉冲系列将期望的指令成为新的系统输入,实质是一种前馈控制。
HST姿态控制方法体现了当前航天器三轴稳定控制技术的最高水平。在足够精确的模型基础上应用经典控制理论能由并不复杂的控制器实现航天器高精度姿态控制,但从长远角度看,应用先进控制理论更利于解决未来面临的更复杂和更困难的控制问题。另外,HST事例说明,仅靠地面设计不一定能保证航天飞行任务的顺利完成。因此,航天器姿控系统的设计在条件许可时应延伸至在轨运行阶段,在轨进行必要的测试和辨识,根据飞行数据对原始控制方案进行优化以确保达到甚至超过预定的系统性能要求。
3.3 卫星结构模态和干扰力矩在轨辨识
卫星的不确定性因素客观存在,在轨辨识技术是解决不确定性影响下高精度高稳定度控制问题,提高卫星稳定运行能力的关键技术。为满足进一步提升卫星姿态控制精度的需要,用现代辨识理论对在轨卫星模态、干扰力矩、转动惯量、敏感器和执行机构噪声等特性参数辨识进行研究,为在轨或后续卫星前馈控制参数修正、卫星动力学模型修正等提供参考。
a)自由响应模态辨识
卫星在展开太阳帆板后的一段时间内,卫星姿态控制系统一般处于关闭状态,以免消耗过多的燃料。上述情形相当于卫星在初始时刻受到了一种输入扰动,然后输入扰动消除;卫星姿态输出可认为是开环自由响应,它包含了挠性模态参数信息,利用这种自由响应可进行模态参数辨识。在轨进行卫星挠性附件的模态辨识,能对地面试验验证情况进行检验和性能评价。
b)稳态响应的干扰力矩辨识
不失一般性,考虑卫星俯仰轴干扰模型进行辨识。可利用特征系统实现算法确定其离散时间状态空间模型,进而确定干扰频率的估值。若卫星闭环控制系统的传递函数已知,则可进一步确定干扰的幅值和相位。
星上执行机构(如飞轮)和各种敏感器(星敏、陀螺)的数学模型和噪声特性也可通过在轨数据进行辨识。如三浮陀螺的噪声特性为有色噪声,光纤陀螺噪声特性近似为白噪声,通过时间序列分析法分析在轨数据分析陀螺噪声的相关时间、状态噪声协方差矩阵等。
3.4 高精度姿态确定技术
遥感卫星图像定位中,与轨道误差相比,姿态误差对定位精度的影响更大。卫星的姿态确定精度取决于姿态敏感器硬件水平和滤波算法。在甚高精度姿态测量中,目前我国国产星敏感器最高精度20″,较国外1″精度还有差距;陀螺随机漂移0.01(°)/h,与国外陀螺精度水平相差甚远。因此,受到硬件的限制,改进卫星姿态确定算法及软件处理技术成为提高国产卫星姿态确定精度的主要途径。
a)基于陀螺和星敏感器的高精度姿态确定
目前,国内外高精度卫星多采用陀螺与星敏感器组合进行姿态确定,精度为角秒量级。因受星载计算机运算能力的限制,不可能在轨进行实时计算,故一般采用定增益卡尔曼次优滤波算法,在地面将设计的滤波增益矩阵加载到星载计算机中。卡尔曼滤波算法是一种基于准确模型的最优估计算法,敏感器噪声统计特性的准确性对姿态确定精度有很大影响,而地面测定的噪声特性与在轨有很大差异,可利用在轨辨识方法对敏感器的噪声特性进行辨识,重新设计滤波增益矩阵并通过在轨注数修改,以提高姿态确定的精度。
b)基于卫星动力学模型估计的高精度姿态确定
由于陀螺造价高、在轨寿命短等因素,设计无陀螺的高精度姿态确定系统变得十分有意义。利用卫星动力学模型估计(如图4所示)卫星姿态角度,确定的姿态用于高频姿态信息,而星敏感器姿态用于低频姿态信息,利用最终的姿态估值设置每个滤波周期内动力学模型的初值。随着星敏感器精度和输出频率的不断提高,未来在稳态运行阶段星敏感器完全可替代陀螺实现甚高精度的姿态确定。
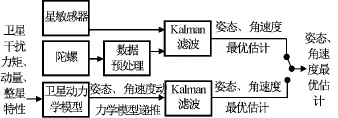
图4 基于卫星动力学和姿态敏感器的姿态确定系统原理Fig.4 Attitude determination system based on dynamics and attitude sensors of satellite
c)星敏感器误差、在轨热变形标定
采用不同组合的星敏感器定姿,姿态测量基准会因各自星敏感器的安装误差和变形不一致而发生变化。在载荷成像过程中,由于某种原因(如接入定姿系统的星敏感器出现数据无效等),定姿的星敏感器组合发生变化,这将引起星上姿态确定值的变化。星敏感器低频误差难以用现有的姿态确定卡尔曼滤波算法消除,作为测量误差的星敏感器低频误差会表现在姿态确定结果中,使姿态确定的精度受到限制。考虑具有成像能力的卫星有效载荷具备获取地标或恒星信息的能力,且测量精度较高(到达角秒级),可作为姿态基准对星敏感器低频误差进行估计和补偿。为提高卫星姿态确定精度,根据有效载荷提供的一个时间序列中的地标或恒星测量信息,采用批处理方式,估计星敏感器低频误差参数,进而模拟低频误差轮廓,将其用于补偿卫星姿态估值中星敏感器低频误差的影响。
4 结束语
本文对遥感卫星高精度高稳定度控制技术进行了综述。国外在高精度测量中应用了高精度的测量敏感器,并用卡尔曼滤波实现高精度姿态确定;高稳定度控制中,对经典控制理论进行了改进并对应用先进控制方法进行了尝试并取得了很好的效果;通过在轨试验对卫星结构模态、干扰力矩辨识等参数进行辨识,使卫星动力学模型更精确。目前国内轨遥感卫星的性能与国外相比还有一定的差距,迫切需要提高遥感卫星控制系统的综合能力。未来遥感卫星对控制系统的高精度高稳定度及快速机动等将会有更高要求,其中亟需研究大型挠性多体动力学、高精度姿态确定等技术,特别是需通过地面试验验证系统提高卫星动力学建模分析与高精度姿态控制能力。
[1] IRWIN R D,GLENN R D,FRAZIER W G,etal.Analytically and numerically derivedH∞controller design for Hubble space telescope[J].Journal of Guidance Control,and Dynamics,1995,18(2):214-221.
[2] NURRE G S,SHARKEY J P,NELSON J J,etal.Preservicing mission,on-orbit modifications to Hubble space telescope pointing control system[J].Journal of Guidance Control,and Dynamics,1995,18(2):222-229.
[3] MOHL J B.Attitude determination and control for the Landsat spacecraft[R].AAS,92-011.
[4] JEANNEAU M,ALAZARD D,MOUYON P.A semi-adaptive frequency control law for flexible structures(on the way to adaptive Q_LQG control)[R].AIAA,99-4229.
[5] IWATA T.Attitude dynamics and disturbances of the advanced land observing satellite(ALOS):modeling,identification,and mitigation[R]. AIAA,2008-6263.
[6] IWATA T.Precision attitude and position determination for the advanced land observing satellite(ALOS):SPIE 4th Int Asia-Pacific Environmental Remote Sensing Symp[C].Honolulu:2004.
[7] 李 果.中国航天器未来发展的GNC关键技术[J].空间控制技术与应用,2009,35(6):1-12.
[8] 何英姿.全球成像系统2000卫星的姿态确定与控制[J].控制工程,2000(1):39-56.
[9] 曹海翊,刘希刚,李少辉,等.“资源三号”卫星遥感技术[J].航天返回与遥感,2012,33(3):7-16.
[10] 许 伟.快鸟-2卫星[J].国外卫星动态,2002(3):11-22.
[11] 李智斌.航天器智能自主控制技术发展现状与展望[J].航天控制,2002,20(4):1-7.
[12] BUKLEY A P.Hubble space telescope pointing control system design improvement study results[J].J of Guidance,Control,and Dynamics,1995,18(2):194-199.
[13] FESQ L,STEPHAN A.Advances in spacecraft autonomy using artificial intelligence techniques[C]//Pro of the Annual Rocky Mountain Guidance and Control Conf,[s.l.]:[s.n.],1989:53-67.
[14] MAEKISON D,GIFORD K.An expert system for satellite attitude determination and control[R].N96-30503.
[15] 曲广吉.多体系统动力学在航天领域中的应用:中国力学学会多体系统动力学学术会议[C].长岛:1996.
[16] 原劲鹏,刘建功,杨 雷.步进电机驱动柔性负载的一种振动抑制控制策略[J].空间控制技术与应用,2008,34(6):35-38.
[17] 郑列华,尹达一,冯 鑫,等.卫星振动对HY-1卫星步进电机工作状态的影响[J].上海航天,2008,25(3):37-43.
[18] 薛孝补,朱海江,吕 旺.卫星大型旋转载荷动平衡控制应用研究[J].宇航学报,2012,33(8):1001-1005.
[19] 斯祝华,刘一武.帆板驱动时的卫星姿态前馈补偿控制[J].空间控制技术与应用,2010,36(6):11-15.
[20] KOMATSU K.On-orbit system identification and at-titude control experiment of ETS-VI[R].NALTR-1328,1997.
[21] 边志强,程卫强,薛孝补,等.基于陀螺和星敏感器的卫星姿态确定算法[J].航天器工程,2011(2):33-38.
[22] 矫媛媛,周海银,王炯琦.基于MEKF的卫星姿态确定精度影响因素分析[J].系统工程与电子技术,2010,32(7):1480-1484.
[23] ANDREWS S F,BILANOW S.Recent flight results of the TRMM Kalman filter[R].AIAA,2002-5047.
[24] ERIC M.J,MICHAEL M.NOAA's GOES R-next generation satellite[R].MD ADA 497823.
[25] 熊 凯,汤 亮,刘一武.基于地标信息的星敏感器低频误差标定方法[J].空间控制技术与应用,2012,38(3):11-15.
[26] 刘良栋.卫星控制系统仿真技术[M].北京:宇航出版社,2003:160-178.
[27] 魏世隆,曹喜滨,张世杰.具有运动部件的预警卫星姿态前馈复合控制[J].航天控制,2004,22(3):45-49.
猜你喜欢
中学生博览(2022年9期)2022-06-21
钻采工艺(2022年2期)2022-05-18
宇航计测技术(2021年3期)2021-08-17
航天制造技术(2017年5期)2017-11-24
电子产品世界(2016年1期)2016-03-07
空间控制技术与应用(2015年3期)2015-06-05
空间控制技术与应用(2015年4期)2015-06-05
空间控制技术与应用(2015年1期)2015-06-05
科技创新导报(2014年11期)2014-11-05