单神经元PID控制算法在智能车控制系统的应用
2015-01-13 08:30侯一民朱志超
化工自动化及仪表 2015年2期
侯一民 朱志超
(东北电力大学自动化工程学院,吉林 吉林 132000)
智能车即无人驾驶车辆,涉及环境感知、路径规划、驾驶行为智能决策、车辆导航定位及车辆自动控制等技术领域,作为智能交通系统中许多高新技术的载体而受到广泛关注。对于智能车的研究,控制部分作为最底层和最重要的环节,是智能车的核心部分[1]。
PID算法作为典型的传统反馈控制,以结构简单、鲁棒性好及稳定性高等优点而广泛应用。肖建文和李永科运用增量型PID控制算法对舵机和电机进行控制,但在环境变化时,该算法不能及时自整定控制参数,小车的行驶易受干扰而出现振荡[2]。针对这一缺点,林焕新等提出了模糊PID控制算法,该方法克服了PID参数不能自整定的缺点,但模糊控制规则是根据研究者的先验知识和实践经验确定的,具有不完整和主观性强的缺点[3]。黄志强提出了分段PID控制算法,该算法需对路径进行分段,降低了控制器的运行速度,从而影响小车的行驶速度[4]。为此,笔者尝试将具有自学习、鲁棒性强及不需建立具体的数学模型等优点的单神经元算法与经典PID算法相结合实现对智能车的控制。
1 智能车硬件结构①
智能车能否平稳快速行驶,取决于小车系统的路径识别、判断及反应能力等,这都与小车的硬件系统有关,因此设计时要充分考虑其合理性。智能车硬件整体结构如图1所示。
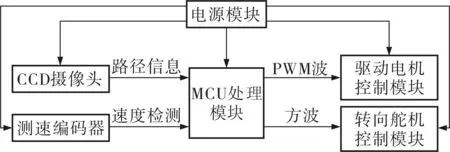
图1 智能车硬件整体结构框图
由寿命长、污染小的额定电压为7.2V的镍镉充电电池为智能车各系统提供特定电源,以MK60DN512ZALQ10单片机为控制核心[5],经线阵CCD镜头采集的赛道信息成像在感光元件上,量化后得到128个电压值,经运算放大器传给单片机的A/D转换器,并进行图像处理,将结果传给控制器,输出结果:
a. 经单片机FTM模块产生方波,传给BTN7960模块,根据输入的占空比控制输出电压,进而控制电机转速,最终的控制目的是使智能车以最快的速度沿赛道中心线稳定运行;
b. 单片机FTMPW模块产生PWM方波,方波的脉宽决定了舵机的输出转角,用于控制车轮沿赛道中心线行驶,最终的控制目的是使智能车能够做半圆周运动,即驶过弯道。
2 智能车的运动学模型
智能车在直道行驶时,经BTN7960芯片输出的电压与电机转速成正比,因此只需对舵机建立运动学模型。智能车的舵机安装在前轴中心处,所以舵机驱动角度与前轮转向角度成正比关系,因此只需证明智能车在转弯时是圆周运动,控制器即可实现对舵机的转弯控制[6]。智能车舵机运动力学分析如图2所示,智能车从M点出发以速率vA行驶t时刻后走过弧长S到达N点,vD为车前轮转过一定角度后的行驶速率;O′为瞬时转向中心。
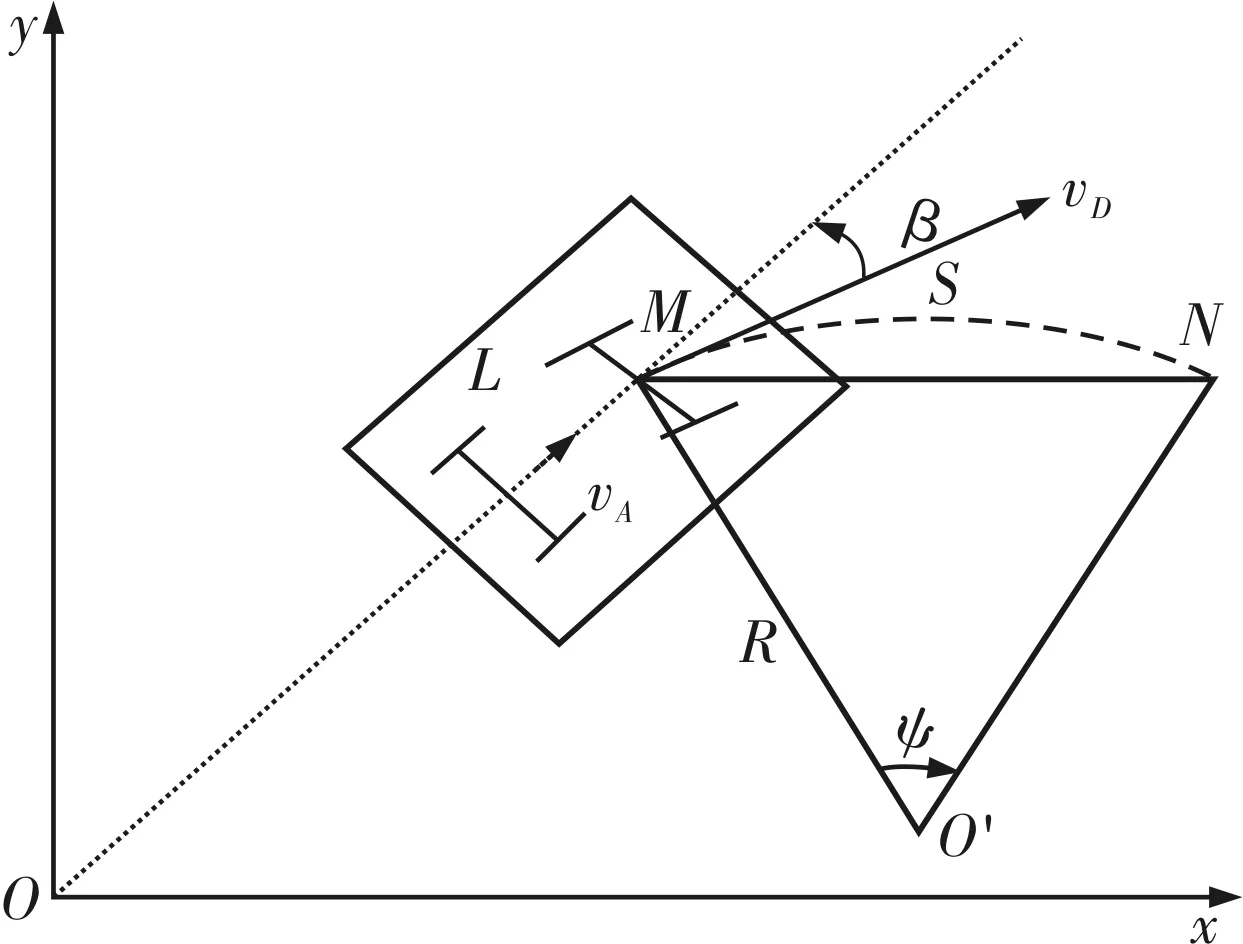
图2 智能车舵机运动力学分析
由图2可知,智能车运行弧长S对应的半径R为:

(1)
式中L——车前轮与后轮间的距离;
β——前轮行驶方向偏离轴中心线的角度。
角度ψ对时间的积分公式为:

(2)
其中,vA为车后轮行驶速率;ψ为车后轮行驶方向偏离国际坐标轴x轴的角度。
图2中令M点坐标为(xM,yM),将其对时间进行积分可得:
(3)
(4)
将式(2)代入式(3)、(4)并对其进行积分,可得:
(5)
(6)
化简消掉ψ可得:
(7)
式(7)中,a、b和L均为常数,因此其结果只与β有关,当β确定时,M点的运行轨迹为圆。所以可以确定智能车在转弯过程中做的是圆周运动,继而可以应用控制器对智能车的舵机在弯道中进行控制。笔者引入单神经元PID控制器实现对智能车舵机的控制。
3 智能车控制策略
对于智能车控制系统,若把跑道的路径变化看作系统的输入,那么此系统可以看作一个随动系统,智能车应跟随道路变化而运行;若把跑道的路径变化看作对智能车控制系统的扰动,那么此系统可看作一个恒值控制系统,智能车应能够适应道路曲变而更加平稳快速地运行。因此要选择合适的控制算法,既要满足跟随系统的动态特性,又要满足恒值控制系统的稳定性。
运行中,智能车的行驶环境会受光照等因素影响,针对电机和舵机的控制,应能实时准确地跟踪多变的赛道。
采用传统PID控制算法时,智能车的行驶方向和道路中心线之间的距离偏差,经过PID控制器的积分和微分环节处理后,分别计算出积分值和微分值,再将积分值、微分值和偏差按一定的线性规律组合,在比例环节作用下得到实际输出,由于CCD传感器是按一定周期获取道路信息的,因此必须将连续的PID控制算法离散化,得到增量型PID算法:

(8)
3个系数在控制过程中分别起着重要的作用,因此对3个系数的在线实时整定非常必要。经典PID本身不具备参数自整定功能,很难控制智能车实时适应环境变化。
在此,笔者将鲁棒性强的经典PID算法与自适应能力强的单神经元算法相结合,实现对智能车系统的控制。神经元网络是智能控制的重要组成部分,是本质性的非线性系统。单神经元作为构成神经网络的基本单位,具有自学习和自适应能力,且结构简单易于计算,将其与PID算法相结合,通过修改神经元的权值系数ωi(t)实现其性能。也可以在一定程度上解决传统PID调节器不宜在线实时整定参数,难以对一些过程复杂、参数时变、非线性和强耦合系统进行有效控制的不足。
3.1 单神经元数学模型
单神经元的结构示意如图3所示。
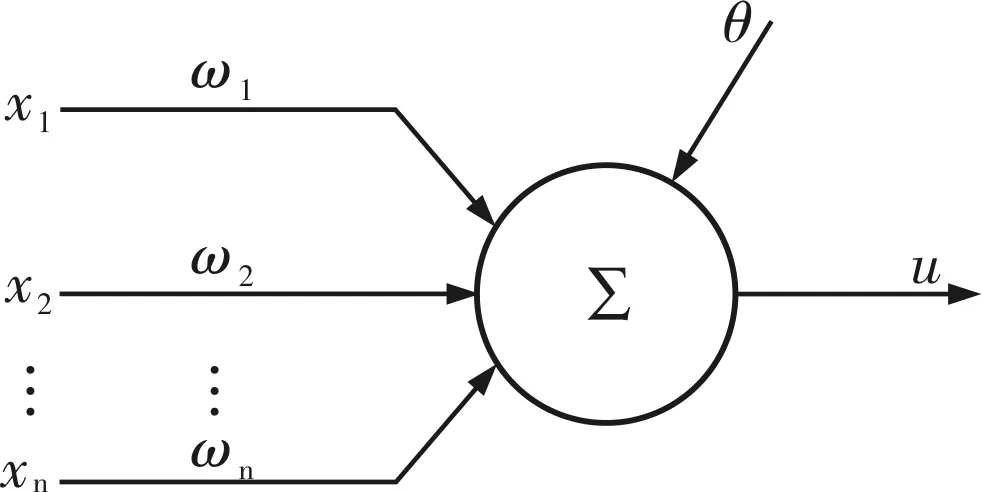
图3 神经元数学模型结构
神经元的数学模型[7]如下:
(9)
式中u——神经元外部状态输出值;
xi(t)——t时刻单神经元的外部状态输入信号,即t时刻智能车的行驶方向和道路中心线间的距离偏差;
ωi(t)——t时刻神经元外部输入信号xi(t)的权值系数;
θ——神经元状态阈值。
3.2 单神经元PID控制器
单神经元PID控制器的结构框图[8]如图4所示。
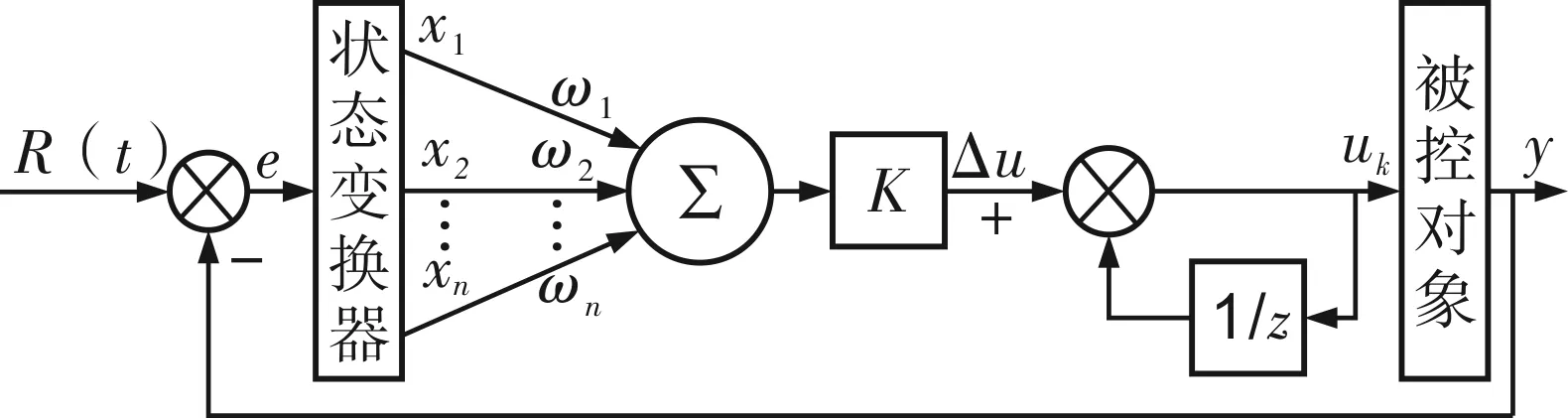
图4 单神经元PID控制器结构
取n=3、θ=0,则单神经元PID的外部状态输入即t、t-1和t-2时刻智能车的行驶方向和道路中心线间的距离偏差分别为:
x1(t)=R(t)-y=e(t)
(10)
x2(t)=e(t)-e(t-1)
(11)
x3(t)=e(t)-2e(t-1)+e(t-2)
(12)
单神经元PID的状态输出为:

(13)
由式(11)~(13)知,式(14)~(16)具有按偏差的比例、积分和微分输入项,故ωi(t)可以看作是增量式PID的比例、积分和微分系数:
ω1(t)=ω1(t-1)+ηiz(t)u(t)x1(t)
(14)
ω2(t)=ω2(t-1)+ηpz(t)u(t)x2(t)
(15)
ω3(t)=ω3(t-1)+ηdz(t)u(t)x3(t)
(16)
其中,K为神经元比例系数,K的大小决定系统的快速性,但过大会使系统的超调量加大引起系统不稳定,过小会使快速性变差,因此K值的选取要适中;ηp、ηi、ηd分别为比例、积分和微分学习速率;z(t)为性能指标或神经元递推信号,z(t)=e(t)。
3.3 单神经元PID控制器的参数整定
对于学习速率ηp、ηi和ηd的整定,可先取较小值。如果此时过程从超调趋向平稳的时间偏长,可适当地增加ηp和ηd;反之则减小。如果响应特性出现上升时间短、超调过大的现象,应减小ηp;反之增大。权值系数ωi(t)的整定,采用有监督的Hebb学习规则[9],学习规则又是通过计算算法来实现的。
有监督的Hebb学习规则如下:
a. 选定权值系数ωi(t)的初值为ωi(0);
b. 由式(14)~(16)求得xi(t);

d. 计算y;
e. 调整ωi(t),若实际输出与设定值相符,ωi(t)稳定不变;否则返回步骤b,直到ωi(t)达到设定值。
有监督的Hebb学习算法如下:
(17)
(18)
ωi(t)=ωi(t-1)+ηie(t)u(t)xi(t)
(19)
4 仿真与结果分析
4.1 Matlab仿真结果对比
对于单神经元PID控制算法,不需要建立受控对象的精确数学模型,可由系统偏差来调整控制量,从而使系统达到期望输出,对于PID和模糊PID控制算法所建立的传递函数[10]为:
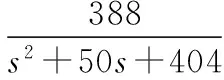
(20)
取舵机的周期为0.200ms,经测试,智能车的单片机FTMPW模块产生PWM方波的脉宽为0.005~0.025ms,对应舵机的输出转角为0~180°,将舵机左打死即将车轮摆正,可求得舵机偏差约为640份。又因线阵CCD感光元件是一条由128个点构成的直线,因此图像的最大偏差为128份,控制器中的比例系数P可近似由下式求取:
(21)
采用试凑法分别求取Ki=3.0、Kd=0.0001。
采用PID、模糊PID和单神经元PID 3种控制算法的输出响应曲线对比如图5所示。
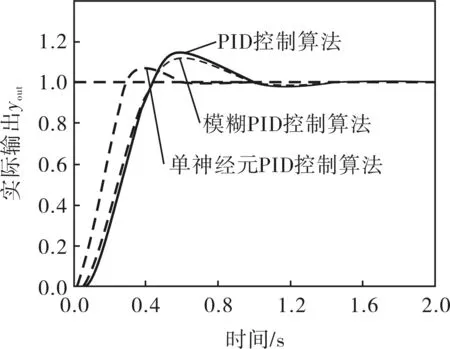
图5 3种控制算法的输出响应曲线对比
3条响应曲线的性能指标比较见表1,Tp为系统的响应速度;Ts为系统达到给定值的所需时间;超调量σ反映了调整过程中系统输出最大值与稳态值的偏差;振荡次数N反映了响应曲线在调节时间范围内围绕稳态值振荡的次数。稳态误差ess是反映系统准确性的性能指标,当时间趋于无穷大时,系统响应的期望值与实际值之差。
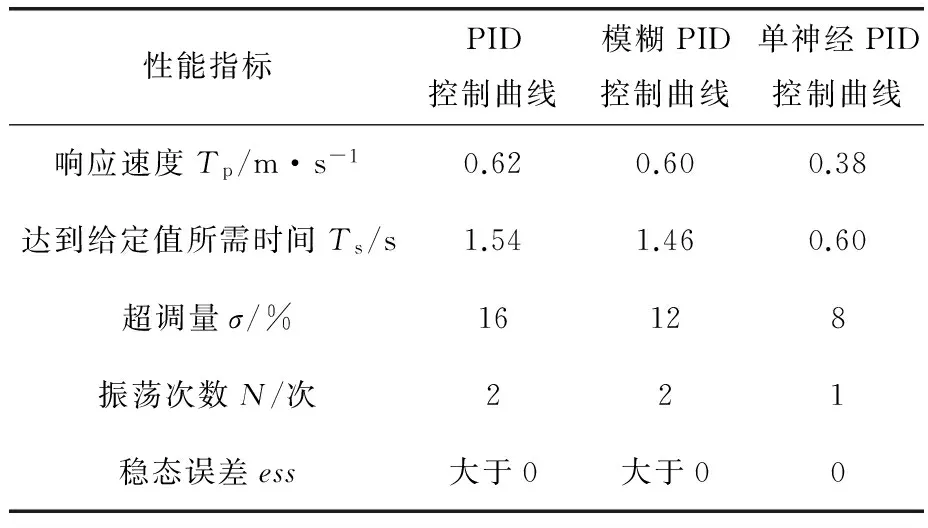
表1 3条响应曲线的性能指标比较
综上所述,采用单神经元PID控制算法对智能车进行控制,在稳定性、准确性和快速性方面都取得了较好的控制效果。
4.2 实测数据对比
分别用PID、模糊PID和单神经元PID 3种控制算法对智能车的舵机和电机进行控制,使其分别在相同环境的30m带有不同弯道和直道、4m弯道和10m长直道中进行3次运行试验,表2为所用时间与速度的对比。

表2 智能车在3种跑道上所用时间与速度的对比
从表2数据中可以看出:智能车在带有不同弯道和直道的30m长赛道自主行驶时,采用单神经元PID控制算法时的平均用时最短,平均速度最快;在同弯度的4m长弯道中自主行驶,采用单神经元PID控制算法时的平均用时最短,平均速度最大;在10m长直道中自主行驶,采用单神经元PID控制算法时的平均用时最短,平均速度最大。证实了智能车在同等条件的赛道中自主运行,采用单神经元PID控制算法对智能车的电机和舵机进行控制,行驶速度最快、所用时间最短,能达到更好的控制效果。
5 结束语
笔者提出了应用单神经元PID控制算法对智能车进行控制,根据PID、模糊PID和单神经元PID 3种控制算法的Matlab仿真结果,以及分别应用于实际智能车控制实验中的实测数据比较可知:由于单神经元PID控制算法的自学习自适应能力强,将其应用在智能车的舵机和电机控制后,智能车的运行速度更快、鲁棒性更强、效果更好。
[1] 赵盼.城市环境下无人驾驶车辆运动控制方法的研究[D].合肥:中国科学技术大学,2012.
[2] 肖文健,李永科.基于增量式PID控制算法的智能车设计[J].信息技术,2012,(10):125~127.
[3] 林焕新,胡跃明,陈安.基于自适应模糊控制的智能车控制系统研究[J].计算机测量与控制,2011,19(1):78~80.
[4] 黄志强.基于CCD摄像头智能车分段PID控制算法设计[J].电子设计工程,2011,19(2):55~57.
[5] 卓晴,黄开胜,邵贝贝,等.学做智能车——挑战“飞思卡尔”杯[M].北京:北京航空航天大学出版社,2007:128.
[6] Liu Q Q,Wang B,Ma X W.The Research of Intelligent Vehicle’s Steering Control System Based on Fuzzy Control[C]. Advanced Computational Intelligence(ICACI).Nanjing:IEEE,2012:474~478.
[7] 王振臣,赵莎,杨康.汽车主动悬架单神经元PID控制器设计[J].机械设计与制造,2013,(11):29~32.
[8] 任俊杰.基于PLC的单神经元PID控制器的设计与实现[J].制造业自动化,2012,34(7):11~13.
[9] Zhang C N,Zhao M,Wang M.Single Neuron Rational Model of Arithmetic and Logic Operations[J].IEEE Transactions on Neural Networks,2011,3(11):739~747.
[10] 严大考,李猛,邹栋,等.基于MC9S12XS128单片机的智能车控制系统的设计[J].华北水利水电学院学报,2013,34(1):106~110.
猜你喜欢
公民与法治(2022年4期)2022-08-03
走向世界(2022年3期)2022-04-19
小哥白尼(趣味科学)(2020年6期)2020-05-22
纺织科学研究(2020年1期)2020-05-21
自动化学报(2019年6期)2019-07-23
电子制作(2018年1期)2018-04-04
制造技术与机床(2017年6期)2018-01-19
空中之家(2017年11期)2017-11-28
制造业自动化(2017年2期)2017-03-20
舰船科学技术(2015年8期)2015-02-27