
套筒滑动式调焦机构综合力学性能分析
2015-01-27 01:30申军立张春林王守印
机电产品开发与创新 2015年6期
申军立,张春林,王守印
(中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
0 引言
在靶场光学测量中,由于目标距离的变化或者环境温度的改变,光学成像的焦距也随之改变。为了实现对目标的自动捕获和连续跟踪,现代靶场光学测量仪器,大都采用变焦距光学镜头的设计形式。调焦机构是实现变焦距镜头光学调焦的机械结构,完成光学调焦的执行者,保证目标在镜头的光学靶面上清晰成像。在靶场测量环境下,能否保证调焦机构运动平稳、运动精度满足要求,直接影响目标成像的清晰度、测量精度和跟踪效果[1]。
根据调焦时电机输出的旋转运动转化为,实现调焦的直线运动的转化方式不同,调焦机构分为涡轮蜗杆、丝杠螺母、圆柱凸轮等常用形式[2~4]。这几种调焦机构各有优缺点,一般根据应用场合、精度和成本要求选择[2,5~7]。随着对光学镜头应用范围的拓展以及性能指标要求的提高,例如连杆双滑块[8,9]等新型调焦机构开始应用。
另外,根据调焦时移动镜筒的运动形式和摩擦形式不同,调焦机构又分为套筒滑动式、套筒滚珠丝杠式、滑动导轨式以及滑动密珠导轨式等[6,9,10],都是为了实现调焦镜片沿轴线的滑动。在这几种调焦机构中,套筒滑动式结构相对简单,且容易实现,加工和装调时间短,成本相对较低,在调焦机构中应用普遍。但受运动形式限制,调焦时容易出现驱动力不足和停顿卡滞的问题,导致调焦精度不高,甚至无法完成设定的调焦工作[2,8,10]。多数文献中提到套筒滑动式调焦机构存在的这一问题,但是很少论述如何解决。
鉴于套筒滑动式调焦机构的调焦优势以及存在的不足,考虑其机构运动特点,提出运用机构运动学原理,对套筒滑动式调焦机构(以下简称套筒调焦机构)进行综合力学性能分析及精度计算,从受力和运动特点探讨结构的设计,以最优化套筒调焦机构,避免出现调焦停顿卡滞等问题,实现其平稳高精度的调焦。
1 套筒调焦机构运动原理分析
套筒调焦机构的机构形式如图1 所示。一般由直线电机、调焦镜筒、调焦镜组、固定镜筒、CCD(光学传感器)、电位计、光电开关等组成,这些零部件构成了一个闭合控制回路,如图2 所示。直线电机驱动调焦镜筒在固定镜筒中做往复直线运动,电位计和光电开关可以检测调焦位置,反馈给控制电路,计算机检测到位置后,可以发出控制指令,控制电机的开停,实现对调焦机构的调焦位置的控制[7]。
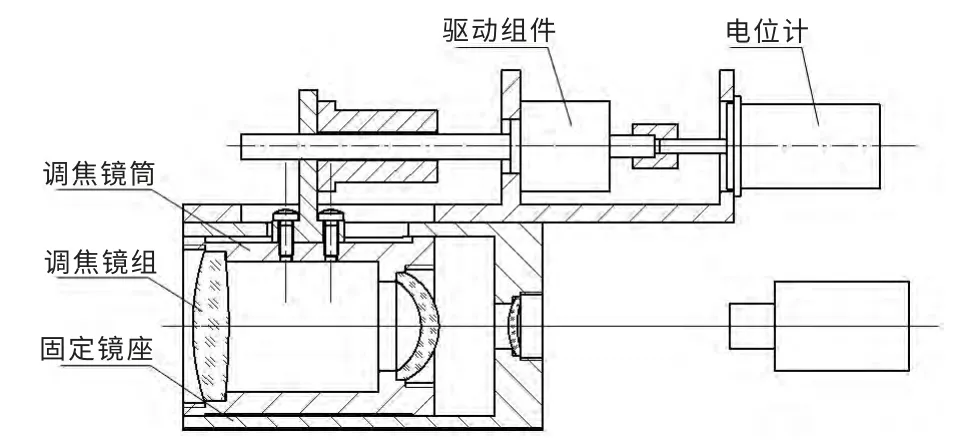
图1 套筒调焦机构

图2 套筒调焦机构系统控制原理
针对调焦镜筒的受力和运动形式,为方便分析,根据机构运动学理论,对机构进行简化,简化后的套筒机构简图如图3 所示。从简图中可以得知,套筒机构是机械机构中常见的轴套式配合机构,将电机的作用简化为驱动力FQ,移动镜筒可以在固定镜筒中往复运动。
2 套筒调焦机构综合受力分析

图3 套筒机构简图
对套筒调焦机构进行受力分析,考虑重力的作用,受力分析结果如图4 所示。分析时考虑两种极限工况:①移动镜筒水平运动;②移动镜筒竖直运动。分析结果如图4(a)和如图4(b)。
如果移动镜筒重力G和驱动力FQ 作用线与移动镜筒运动几何中心不重合,将产生倾覆力矩,当倾覆力矩太大时,容易导致调焦镜筒卡滞,影响调焦的平顺性。因此,设计移动镜筒时一般将二者与移动镜筒运动中心即几何中心重合。下面将分别论述两种工况下的移动镜筒的静力学平衡的分析及计算。
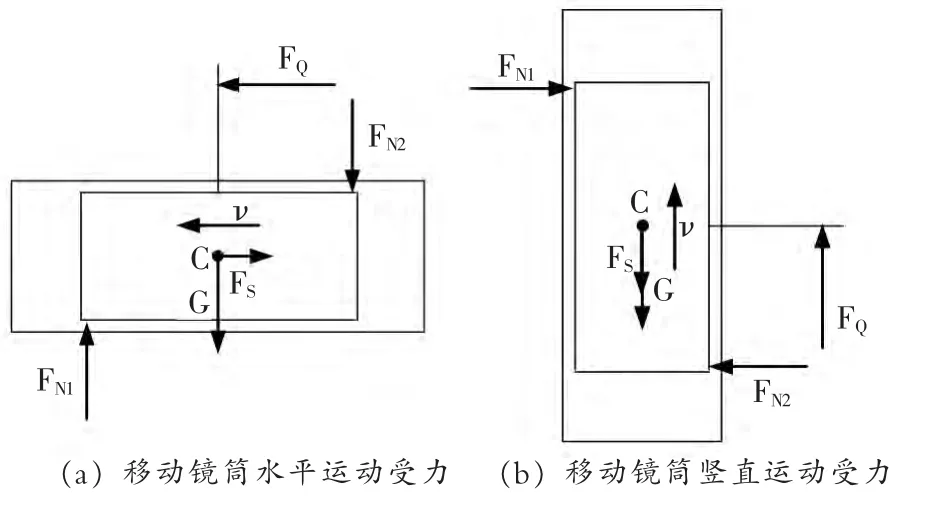
图4 套筒机构受力分析图
2.1 移动镜筒水平运动
由力线平移原理,将驱动力FQ向移动镜筒的几何中心C 平移,平移后添加驱动力FQ产生的力矩M,如图5 所示,并建立如图的坐标系。图中附加力矩M=FQ(l+r),移动镜筒重力G=mg,摩擦阻力FS=μ(FN1+FN2)。对几何中心C 列平衡方程
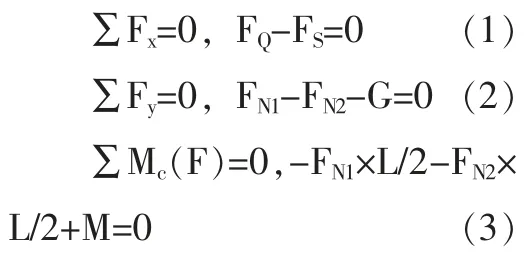
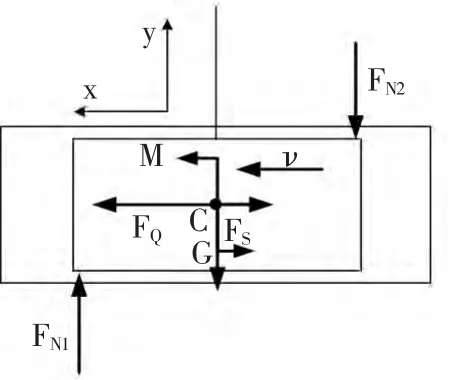
图5 移动镜筒水平运动受力分析
式中:l—驱动力作用点到移动镜筒距离;r—移动镜筒半径;m—移动镜筒质量;L—移动镜筒长度;μ—移动镜筒与固定镜座之间的摩擦系数。由式(2)~(3)可求得:

式(4)代入式(1)后得出调焦机构的设计条件

2.2 移动镜筒做竖直运动
移动镜筒做竖直运动式的受力分析与水平运动时相同,分析结果如图6 所示。移动镜筒不仅受摩擦力,还有重力的直接作用。竖直向上运动时需要驱动力最大。同样对几何中心C 列平衡方程:
由式(7)、式(8)得:

将式(9)代入式(6)可得:


图6 移动镜筒竖直运动受力分析
由式(10)可知,L≠μ(r+l),当L≥μ(r+l),L 越大时,驱动力FQ越小,其相关的函数变化曲线如图7 所示。

图7 FQ(L)函数曲线示意图
2.3 调焦精度分析
套筒机构在调焦时,结构装配误差与调焦视轴晃动误差关系为:

式中:δ—套筒机构加工装配误差;δθ—套筒机构视轴晃动量误差。从式(11)可以看出当调焦机构调焦视轴晃动给定时,移动镜筒轴向越长,对加工和装配的精度要求越低,加工成本也随之下降。
2.4 结果分析
经过以上对套筒调焦机构,在两种极限工况下的机构运动学分析和静力学计算。移动镜筒竖直向上运动时,需要驱动力最大,将这种工况作为设计计算工况。根据式(5)、式(10),设计套筒机构时要求移动套筒满足:移动镜筒长度不小于驱动力作用点到移动镜筒运动轴线的距离,即L≥r+l。达到驱动力优化,满足调焦精度要求。
3 设计计算
根据对套筒调焦机构的设计要求,设计一套调焦机构。设计的移动镜筒回转半径r=51mm,结构长度L=85mm,重量G=10.8N;驱动力作用位置到移动镜筒距离l=33mm;移动摩擦力μ=0.5。经计算所需要的理论驱动力FQ=21.3N,安全系数取2,因此计算出工程设计电机的有效输出力为42.6N,通过这个输出力并考虑运动精度,选择符合要求的步进电机。
4 结论
综合以上讨论,一般套筒调焦机构在满足,移动镜筒长度不小于驱动力作用点到移动镜筒运动轴线的距离的设计条件下,调焦机构性能进一步提高:驱动力优化,调焦运动平稳无停顿卡滞,运动精度提高,调焦视轴晃动误差减小。但是,随着移动镜筒长度的增加,移动镜筒的空间尺寸和重力也在增加。因此,移动镜筒长度要结合结构要求和轻量化设计理念,取最优的设计值。按照这一设计原则,设计的套筒调焦机构,具有更好的机械性能。
[1]林为才,王晶.一种高精度调焦机构设计[J].长春理工大学学报(自然科学版),2010,4.
[2]薛乐堂,陈涛,徐涛,等.一种高精度高可靠性调焦机构设计[J].长春理工大学学报(自然科学版),2012,2.
[3]林为才.经纬仪调焦机构设计[J].光机电信息,2010,12.
[4]杨会生,等.离轴三反空间相机调焦机构设计[J].光学精密工程,2013,4.
[5]陈伟,丁亚林,惠守文,等.推扫式航空遥感器像面调焦机构设计[J].中国光学,2012,1.
[6]李运动,等.中波红外连续变焦机构设计分析[J].电光与控制,2013,1.
[7]许志涛,刘金国,龙科慧,等.高分辨率空间相机调焦机构精度分析[J].光学学报,2013,7.
[8]贾学志,王栋,张雷,等.轻型空间相机调焦机构的优化设计与精度试验[J].光学精密工程,2011,8.
[9]付兴领,黄晓婧,兰卫华.一种红外调焦与变倍共用导向机构的构型设计[J].制造业自动化,2014,2.
[10]占潜. 密珠导轨式光电探测器调焦机构的结构设计与精度试验[D].长春:中国科学院长春光学精密机械与物理研究所,2014.
猜你喜欢
环境技术(2021年2期)2021-07-03
百科探秘·航空航天(2020年2期)2020-03-02
中国外汇(2019年9期)2019-07-13
天文学报(2018年6期)2018-12-20
家庭影院技术(2018年9期)2018-11-02
现代企业文化(2018年13期)2018-06-09
家庭影院技术(2018年3期)2018-05-09
光学精密工程(2016年4期)2016-11-07
系统工程与电子技术(2016年7期)2016-08-21
空间控制技术与应用(2015年1期)2015-06-05
