
消防救援装备新型安全制动机构工作性能研究与仿真分析
2015-01-27 01:30罗继曼崔艳楠李根标魏泽明
机电产品开发与创新 2015年6期
罗继曼,崔艳楠,李根标,魏泽明
(沈阳建筑大学 机械工程学院,辽宁 沈阳 110168)
0 引言
消防救援装备是一种置于建筑体外墙、能快速升降、用于火灾救援的新型装备,由主体装备和轿厢两部分组成,其主体装备和轿厢工作时都需要制动与安全装置。当消防救援装备超过极限速度,如发生快速坠落时,则触发安全制动机构工作,使救援装置减速并停止运行,从而起到安全防护作用。目前,机械设计中常用的安全制动装置有施工升降机的防坠安全器、汽车使用的盘式刹车器等。这些制动形式均为齿轮制动或盘形制动,并没有适用于轨道的制动方式[1~3]。
由于现有的安全制动装置不能适用于新型消防救援装备,很有必要研究新型的安全制动机构。为此,设计了消防救援装备新型安全制动机构,并对其结构和工作性能进行研究。本文对消防救援装备安全制动机构进行了三维建模,使用ADAMS 仿真软件进行了力学仿真分析,通过对电动缸推力曲线图的分析与研究,使其性能满足该类消防救援装备的要求。针对适用于消防救援装备的安全制动机构的研究对此类装备的安全运行具有重要的意义。
1 消防救援装备安全制动机构结构设计与工作原理
结构组成:消防救援装备新型安全制动机构,如图1(a)所示,图中电动缸1、滑块2、连杆3、曲轴4、底座5、销轴6、楔形块7 等7 部分组成。电动缸1 底部固定在消防救援装备独立轿厢上,上部与新型安全制动机构的滑块2 相连接;滑块2 在工字钢上滑动,并与连杆3用销轴连接;连杆3 与曲轴4 长杆端之间由销轴连接,且曲轴4 绕固定的底座5 转动,曲轴4 短杆端由销轴6与楔形块7 连接,随着曲轴的转动,推动楔形块7 上下移动。
工作原理:当消防救援装备独立轿厢超过极限速度,如发生快速坠落时,消防救援装备上的速度传感器工作并报警,随即电动缸1 开始工作,拉动与电动缸1相连接的滑块2 向下移动。滑块2 带动连杆3 向下移动,连杆3 带动曲轴4 绕支座旋转。曲轴短杆端推动楔形块7 向套筒内部移动,在套筒上侧楔形块挤压下,楔形块7 与工字钢之间的空隙距离减小,直至接触。通过楔形块7 上所安装的橡胶摩擦片与工字钢之间产生的摩擦力,使消防救援装备独立轿厢减速、直至安全停止。这时装置处于工作运动状态,三维图如图1(b)所示。

图1 安全制动机构Fig.1 The Safety Brake Mechanism
非工作运动状态时,消防救援装备安全制动机构电动缸保持伸长状态,控制着滑块使其不能够上下运动,使楔形块与工字钢之间始终保持着安全距离,不会形成安全制动机构非工作状态下的制动。
装置从工作状态恢复到非工作状态时,电动缸伸长,推动滑块2 向上移动,进而带动连杆、曲轴绕支座旋转,克服摩擦力带动楔形块7 向下移动,楔形块与工字钢之间的夹紧被放松,轿厢与安全制动机构进行正常工作。
2 消防救援装备安全制动机构的相关计算
2.1 消防救援装备安全制动机构自由度计算
根据平面机构的自由度计算公式,有:

其中:n 为活动构件个数;pl—低副数;ph—高副数。图1 中显示消防救援装备安全制动机构共5 个活动构件,分别是滑块2、连杆3、曲轴4、销轴6、楔形块7,所以活动构件n=5;低副包括移动副与转动副,如图2 中所示,低副pl=7;该安全制动机构无高副,即ph=0。所以消防救援装备安全制动机构自由度为1。
新机构的动力来源为电动缸,即该机构的原动件为1 个,与机构的自由度1 相等,所以该制动机构具有确定的运动。
2.2 消防救援装备安全制动机构楔形块位移计算
消防救援装备安全制动机构楔形块的位移由上升位移与平动位移组成,且楔形块的位移是当滑块2 向下移动,带动连杆与曲轴绕支座旋转所产生的,所以现计算楔形块7 位移与滑块2 向下移动距离之间的关系,如图2 所示。
计算所需各个参数的含义:xe代表滑块上升距离、r 代表曲轴长杆端长度、e 代表偏心距、α 代表曲轴转动角度,β 代表连杆与工字钢之间角度。

图2 安全制动机构运动示意图Fig.2 Schematic diagram of safety brake mechanism
λ=r/l,ξ=e/l;α 与β 之间的关系由△ABD 和△BCO 决定,即:

式(11)建立了滑块位移xe与转角α 之间的关系式,又因为曲轴4 分为长杆部分与短杆部分,且都旋转了α角度,因此,楔形块7 沿X、Y 轴的位移与xe的函数式表达如下,其中lx代表楔形块上升距离,ld代表曲轴短杆部分长度:
算例说明:根据安全制动机构要求,当楔形块上升10mm 时,消防救援装备安全制动机构就能够使独立轿厢安全停止。依据式(11)和(12)可以计算出滑块向下移动的距离xe,也即电动缸收缩的行程。e=80mm。所以xe=14.3mm。当楔形块7 向上移动了10mm 时,安全制动机构完成制动工作时,电动缸带动滑块向下移动的距离为14.3mm。
2.3 消防救援装备安全制动机构制动力计算
消防救援装备主要技术指标:装备运动状态额定乘员3 人,上升与下降速度不小于30m/min,装备固定状态下,救援吊舱可承载4 人,最大升降速度不小于40m/min。爬升系统整机自重1 吨,搭乘消防人员3 人,吊舱自重为400kg,吊舱运载能力为500kg,爬升速度为30m/min,电力驱动,吊舱上安装两个安全制动机构。
消防救援装备吊舱最大运载力时总质量(注意不要用长字母):
Md=Mz+My=400kg+500kg=900kg
其中:Md代表吊舱最大运载力时总质量;Mz代表吊舱自重;My代表吊舱最大运载力。考虑加速产生的惯性力,总摩擦力Fm为:
所以接触力FN=48.6N
通过接触力来反求电动缸所提供的制动力,接触力与电动缸提供的制动力的力学示意图如图3 所示。其中:FN为接触力,F 为制动力,l1为力FN到B 点的力矩,l2为力F 到B 点的力矩。
通过所求,电动缸所需的驱动力为30.375kN。
3 消防救援装备安全制动机构电动缸力仿真分析

图3 力学示意图Fig.3 Mechanical sketch map
将消防救援装备安全制动机构SolidWorks 中的三维模型导入到动力学分析软件ADAMS 中,并对导入的三维模型的各个构件进行重新命名与更改颜色,之后对消防救援装备安全制动机构添加约束,创建各零件之间的运动副。
本文对安全制动机构在安全制动的过程中进行动力学仿真分析,给安全制动机构的电动缸设置驱动力,通过电动缸带动滑块向下滑动进而推动楔形块上升,仿真器安全制动的过程,并求解楔形块接触力,如图4 所示。
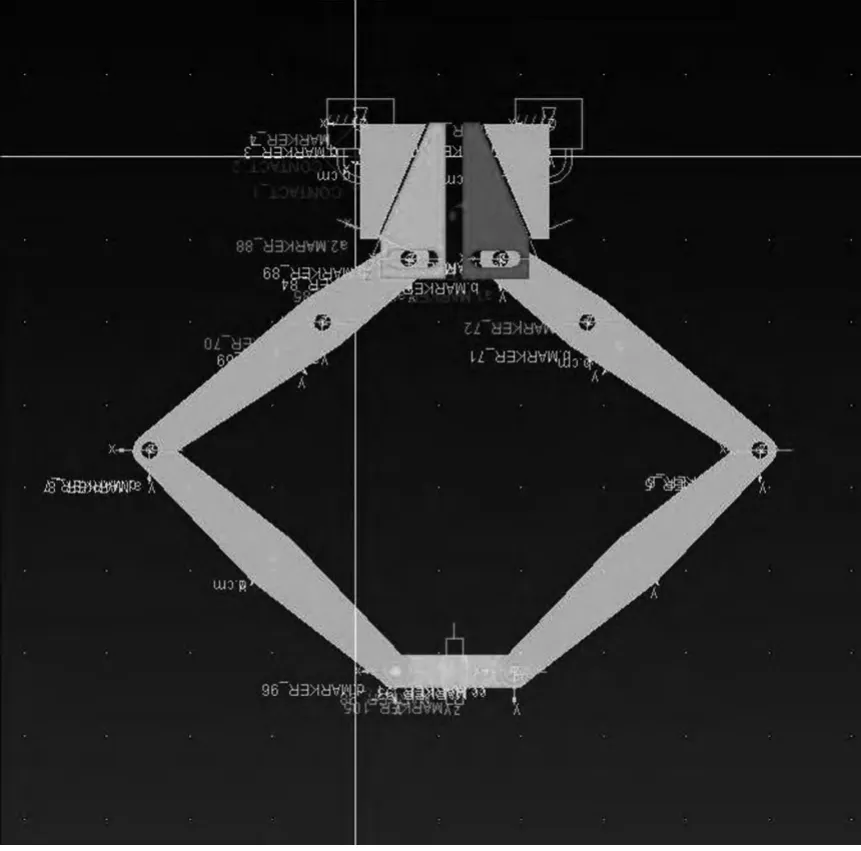
图4 安全制动机构ADAMS 中仿真示意图Fig.4 Simulation schematic diagram of safety brake Mechanism
在电动缸上设置30.375kN 的力,设置运动时间为1s,电动缸带动滑块向下移动,最终推动楔形块向上移动,直至吊舱停止,最后通过得出楔形块上接触力的仿真曲线图,如图5 所示。

图5 楔形块接触力的仿真曲线图Fig.5 Simulation curve of the contact force of the wedge block
通过对该安全制动机构进行动力学仿真分析,可以得到消防救援装备安全制动机构楔形块上的接触力随制动机构夹紧工字钢停止的受力变化曲线,并与机构楔形块上接触力解析计算结果进行比较,仿真结果和理论计算对比如表1 所示。
如图5 所示,随着消防救援装备安全制动机构对工字钢的夹紧,楔形块上接触力在一瞬间突然变大,但在接触后由于吊舱的停止而趋于稳定,最后达到了一个固定的值。运动仿真得到的制动机构楔形块上接触力为44.6kN,而解析计算的受力为48.6kN,两者之间差值仅为4kN,相对误差为8.9%。
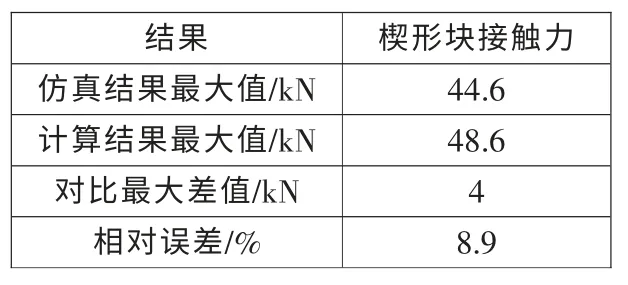
表1 仿真结果和解析计算结果对比Tab.1Comparisonofresultsbetween simulationandcalculation
4 结论
设计了一种新型安全制动机构,对其自由度、电动缸伸缩量和楔形块上接触力进行了计算,又对其楔形块接触力进行了仿真分析。仿真结果表明消防救援装备安全制动机构楔形块上接触力受力为44.6kN,楔形块上接触力解析计算的受力为48.6kN,通过驱动电动缸运动仿真与解析计算结果的最大受力值仅相差4kN,误差为8.9%,误差在允许范围内,可以保证消防救援装备安全制动机构进行制动,能够保证吊舱安全停止,所以,设计的新型安全制动机构能够应用到消防救援装备中,达到设计要求,并能够使吊舱安全制动。
[1]张继生,姚立国,丁一. 汽车制动器速度控制仿真系统设计[J].吉林工程技术师范学院学报,2013,4.
[2]张耀举,龚洪,范鹏.制动力分配优化设计研究[J].汽车科技,2010,6.
[3]杨仁华.基于汽车制动综合性能的鼓式制动器优化设计[J]. 中国西部科技,2010,23.
[4]聂永芳,曹永华,朱坤.基于ADAMS 的抓取机器虚拟样机的运动仿真[J].煤矿机械,2015,5.
[5]吴迪,崔志琴,朱国霞,等. 基于ADAMS 柴油机曲柄连杆机构运动学分析[J].机械工程与自动化,2014,6.
[6]武建新,李华强,庞茂盛.基于MATLAB 和ADAMS 发动机曲轴系统动力学仿真[J].机械制造与自动化,2014,1.
[7]刘昌领,罗晓兰,段梦兰.六缸压缩机曲轴系动力学仿真和疲劳强度分析[J].机械制造与自动化,2014,1.
猜你喜欢
科学大观园(2022年14期)2022-07-17
考试与评价·高二版(2020年1期)2020-09-10
中国特种设备安全(2019年11期)2020-01-16
装备制造技术(2019年12期)2019-12-25
阅读与作文(英语高中版)(2019年8期)2019-08-27
制造技术与机床(2019年4期)2019-04-04
制造技术与机床(2017年5期)2018-01-19
临床医药文献杂志(电子版)(2017年11期)2017-05-17
航空模型(2016年10期)2017-05-09
中国舰船研究(2014年6期)2014-05-14
