
基于神经网络PID控制算法的自动调平系统的仿真研究
2015-01-27 01:30吴玉厚
机电产品开发与创新 2015年6期
李 楠,吴玉厚
(沈阳建筑大学 机械工程学院,辽宁 沈阳 110168)
0 引言
随着我国建筑业的发展,国家对高空作业平台的安全性的重视程度有很大提高,因此本文对经典PID 控制算法和神经网络PID 控制算法进行了分析比较,突出神经网络PID 控制算法在稳定性、快速性、准确性的优点。
1 经典PID 控制器
在工业控制系统中,经典PID 控制是应用最为广泛的控制算法,其控制算式为:

PID 控制算法要采用离散化控制算法。表达式为:

式中:KP,KI,KD的分别为比例系数、积分系数、微分系数e(k)为第k 次,采样的输入偏差u(k)为第k 次采样的系统输出。
2 神经网络控制
BP 神经网络是一种前向网络,典型BP 神经网络包含输入层输出层和隐含层三层网络。如图1 所示。输入层节点传递输入信号到隐含层,隐含层神经元的传递函数常取可微的单调递增函数,整个网络神经元的特性由输出层神经元的的特性决定。

图1 三层BP 网络结构图
设x1,x2,…,xn为BP 网络的输入;y1,y2,…,yn为输出;wji1为输入层到隐含层的连接权值;wji2为隐含层到输出层的连接权值。
输入层:xi=xi0
3 自动调平控制系统的组成

图2 自动调平控制系统的组成
本文采用的自动调平控制系统主要由神经网络PID控制器,被控对象(高空作业平台)和双轴倾角传感器组成。控制器部分由常规PID 控制器和神经网络控制器组成,PID 控制器必须调整好比例,微分,积分的关系,使被控量相互配合相互制约以取得较好的控制效果。如图2 所示。
经典的PID控制器直接对被控对象进行闭环控制,并且三个参数KP、KI、KD是在线调整方式,神经网络根据系统的运行状态调节PID 控制器的参数,以其达到某种性能指标的最优化。
神经网络PID 控制算法归纳如下:①确定输入节点数和隐含层节点数,并赋予各层加权系数的初值,选定学习速率和惯性系数,并令k=1;②采样的到r(k)和y(k),并计算出e(k);③计算各神经网络的输入和输出,输出层为三个可调参数KP、KI、KD;④计算PID 控制器的输出;⑤进行神经网络学习,在线调整加权系数,实现KP、KI、KD的自适应调整;⑥令k=k+1 返回①。
被控对象为三吊点悬吊式高空作业平台,调平策略采用同向追逐式调平法,即上升过程中最高点不动,通过双轴倾角传感器测出x 轴,y 轴与水平面夹角,然后依次调平;下降过程中最低点不动,通过双轴倾角传感器测出x 轴,y 轴与水平面夹角,然后依次调平。采用此方法大大提高了调平精度。
4 控制系统的仿真
本系统仿真时间为6s,采样时间为0.01s 神经网络PID 和PID 的初始控制参数为KP'=4.7787、KI'=1.2391、KD'=0.269 学习速率η=0.28,惯性系数α=0.04。
为分析系统的时域性能,对系统输入单位阶跃信号,通过仿真结果(图3,图4)可以看出,采用神经网络PID 算法在系统的上升时间峰值时间调节时间和超调量以及稳态误差等各项指标都比经典PID 控制算法要好,跟踪能力也优于经典PID,采用神经网络PID 的响应时间在0.5s 内振荡次数少于经典PID 控制算法,使用神经网络PID 算法后系统的时域性能有很大提高。
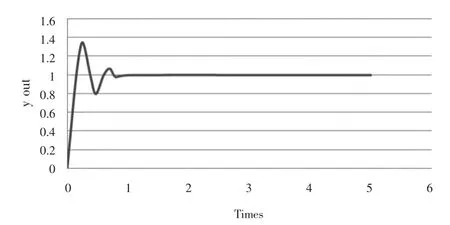
图3 PID 控制仿真结果

图4 神经网络PID 控制仿真结果
5 结束语
验证了自动调平系统采用神经网络PID 控制的可行性和优点,在实际应用中对比例、微分、积分参数,可以进行自适应调整,加强了系统的响应特性。
[1]刘军.电动吊篮使用过程中应着重控制的几个环节[J].建筑安全,2002,5.
[2]李美芳,陆卫倩,王琰.ZLD2-B 型微电脑外墙高空吊篮的设计[J].机械制造,2004.
[3]黄向华.控制系统仿真[M].北京:北京航空航天大学出版社,2008.
[4]Passino KM.Bridging the gap between conventional and intelligent control.IEEE Control Systems Magazine,1993,3.
[5]BennettS. The past of PID controllers.Annual Reviews in Control,2001,25.
猜你喜欢
中国民间疗法(2021年5期)2021-06-09
机械工程与自动化(2020年4期)2020-08-25
环球时报(2020-08-11)2020-08-11
机电工程技术(2018年10期)2018-12-06
电子制作(2018年19期)2018-11-14
森林工程(2018年4期)2018-08-04
航天工业管理(2017年4期)2017-05-12
工业设计(2016年6期)2016-04-17
建筑机械化(2015年7期)2015-01-03
环球时报(2009-11-23)2009-11-23
