
基于MRAS的无速度传感器的异步电机矢量控制
2015-01-27 01:30左瑞
机电产品开发与创新 2015年6期
左 瑞
(宿豫中等专业学校,江苏 宿迁 223800)
0 引言
采用带速度闭环控制的矢量控制技术,可使异步电机获得较高的调速性能。但在一些高温、低温、易燃、易爆的环境,速度传感器的适应能力较差,直接影响调速系统的可靠性,另外安装速度传感器会增加系统的成本。因此研究无速度传感器的矢量控制技术,对提高交流调速系统的可靠性、对环境的适应性,进一步扩大交流调速系统的应用范围具有极其重要的意义。
1 带转矩内环的转速、磁链闭环矢量控制系统
带转矩内环的转速、磁链闭环矢量控制系统如图1所示。主电路采用电流滞环PWM 逆变器;控制电路中,转速环后增加转矩控制内环,转速调节器ASR 的输出作为转矩控制器ATR 的给定,转矩反馈信号经矢量控制方程求得;电路中的磁链控制器ApsiR 用于对电动机磁链的控制,并设置了电流变换和磁链观测环节;ATR 和ApsiR 的输出分别是定子电流转矩分量和励磁分量的给定值,两者经过2r/3s 变换得到三相定子电流的给定值,并通过电流滞环PWM 控制器控制电动机定子的三相电流,最终实现矢量控制。若将图1 的速度检测环节去掉,根据相关模型对转速进行准确估算,并把估算值反馈给速度控制器,就能获得无速度传感器的异步电机矢量控制系统。
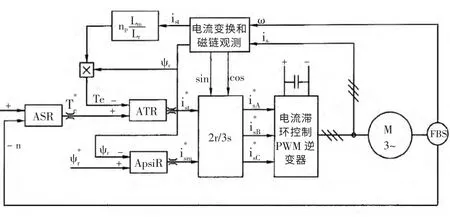
图1 带转矩内环的转速磁链闭环异步电机矢量控制系统Fig.1 The inner ring with torque,speed、flux closed-loop vector control system of asynchronous motor
2 基于MRAS 的转速自适应辨识
如何对转子速度进行准确的估计是无速度传感器矢量控制技术的核心问题,因为转速辨识的精确程度直接关系到系统性能的好坏。本文采用基于模型参考自适应法(MRAS)的转子磁链电压、电流模型完成转子速度的在线辨识。其基本思想是:选定不包含待估计转速参数的转子磁链电压方程作为参考模型;选定包含待估计转速参数的转子磁链电流方程作为可调模型;两模型输出相同的物理量“磁链”;利用两模型输出量的偏差构成合适的自适应律去调节可调模型的参数,来实现可调模型的输出(转子磁链的推算值)跟踪参考模型的输出(转子磁链的期望值),最终使转速估计值逼近转速实际值。式(1)和式(2)给出了α、β 坐标系下,异步电动机转子磁链的电压模型和转子磁链的电流模型:
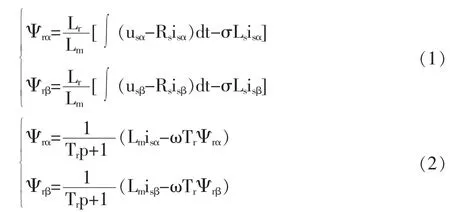
式中:usα、usβ、isα、isβ分别为两相静止坐标系下定子绕组电压和电流;Rs—定子绕组电阻;Ls、Lr、Lm分别定子电感、转子电感、定转子互感;Tr—转子电磁时间常数,Tr=Lr/Rr;σ—漏磁系数,σ=1-Lm2/(LsLm)。
根据Popov 超稳定性理论,选比例积分自适应律,得转子角速度的辨识如式(3):

式中:Ψ*rα、Ψ*rβ—由转子磁链电压模型计算的转子磁链;Ψ^rα、Ψ^rβ为由电流磁链模型计算的转子磁链。图2 给出了基于MRAS 的转速自适应辨识系统模型。

图2 基于MRAS 的转速自适应辨识系统模型Fig.2 The model of speed adaptive recognition system based on MRAS
3 基于MRAS 的无速度传感器矢量控制系统仿真
以图1、2 为基础,在Matlab 中搭建了基于MRAS的无速度传感器矢量控制系统仿真模型如图3 所示。

图3 无速度传感器矢量控制系统仿真模型Fig.3 The simulation model of speed sensorless vector control system
该模型主要包含异步电动机模块、电流滞环PWM逆变器模块、转子磁链观测模块、转速估计模块、矢量控制及PI 调节器模块等。
异步电机模型主要参数参考文献[2]:电压380V、50Hz、极对数2,Rs=0.435Ω,L1s=0.002mH,Rr=0.816Ω,L1r=0.002mH,Lm=0.069mH,J=0.19kg·m2,逆变器直流电压510V,定子绕组自感,Ls=Lm+L1s=0.069+0.002=0.071mH,转子绕组自感Lr=Lm+L1r=0.069+0.002=0.071mH,漏磁系数σ=1-Lm2/LsLr=0.056,转子时间常数Tr=Lr/Rr=0.071/0.816=0.087。
电机空载启动,用Step1、Step2、Step3 三个阶跃信号模拟负载转矩的变动;0.8 秒时Step1 单独作用,阶跃值为55;1 秒时叠加Step2,Step2 的阶跃值为-30;1.2秒时又叠加上Step3,Step3 的阶跃值为30。异步电机给定转速1400r/min,设置好各调节器参数和系统的其他相关参数,运行仿真得矢量控制系统的转速波形如图4所示。

图4 转速波形Fig.4 Speed waveform
图4 中带有小幅波动的曲线是估计转速,较为平滑的曲线是由测量单元获得的实际转速,不难看出两者基本重合,这说明在电机启动或负载突变时,估计转速均能较好的跟随实际转速的变化。所估计转速的动态降落很小,系统恢复时间较短,平稳性较好;这充分验证了所设计的无速度传感器矢量控制策略的正确性和参数设计的合理性。
4 结束语
以三相异步电机为被控对象,设计了带转矩内环的转速、磁链闭环的异步电机矢量控制系统;介绍了基于MRAS 的转速辨识方案,在Matlab 中搭建了无速度传感器的异步电机矢量控制系统模型,并对系统进行了仿真分析;仿真结果表明所采用的控制策略控制效果良好,能在较大负载扰动下实现无传感器方式的异步电机的稳定运行。
[1]张贞艳,左瑞.矿井提升机的无速度传感器矢量控制[J].机电产品开发与创新,2014,11.
[2]洪乃刚.电力电子和电力拖动控制系统的MATLAB 仿真[M].机械工业出版社,2006.
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
现代防御技术(2016年1期)2016-06-01
电测与仪表(2016年10期)2016-04-12
新高考·高一物理(2016年1期)2016-03-05
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04
组合机床与自动化加工技术(2014年10期)2014-03-01
